您现在的位置是:首页 >技术交流 >汽车架构-工作流程 以及相关协议解读网站首页技术交流
汽车架构-工作流程 以及相关协议解读
全车架构(E/E)
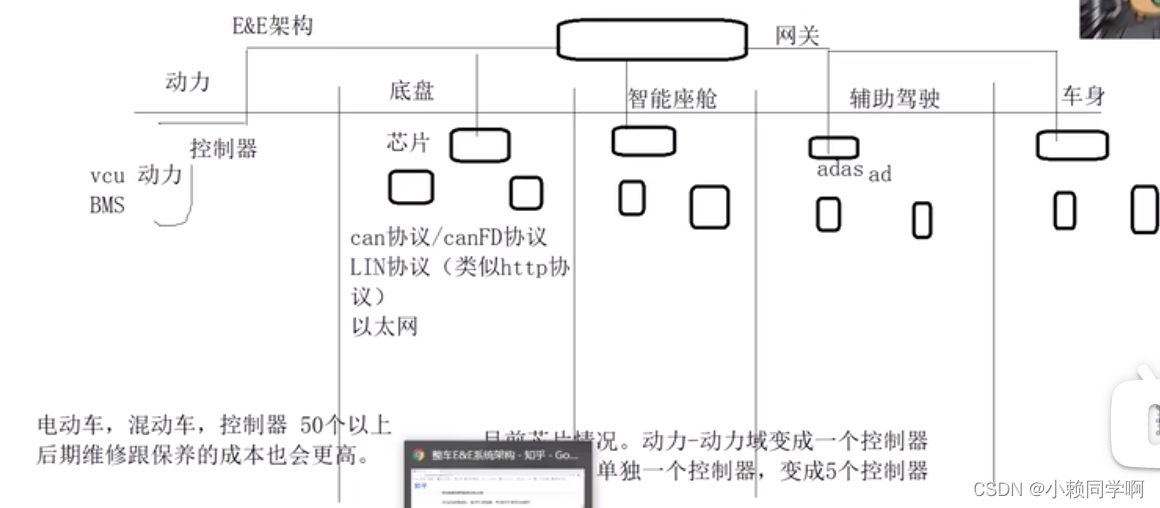
车载测试阶段:
台架测试
HIL测试(硬件在环测试)
ADAS智能辅助驾驶测试
OTA测试(远程升级测试)
测试工具:
Can协议工具:Canoe Pcan Zcanpro
辅助工具:万用表(测试电压 电流 电路通断) 电源 示波器(设备信号波分析)
编程语言:Cpla Python ADb
HIL硬件在环测试:
HIL台架硬件平台:需要UIL台架供应商提供实时仿真机硬件 ,比如FPGA卡板
供应商Dspace NI公司 Vector Speedgoat
HIL软件平台:自动化测试系统 Veristand实验管理平台,TestStand自动化测试软件
HIl测试仿真模型:需要客户和供应商根据产品功能和需求提供模型
ADAS智能辅助驾驶
DMS疲劳驾驶:疲劳监测
LKAS车道保持
LDWS车道偏离警示系统
AEB紧急停车系统
算法库测试阶段:各类工况下收集的行车场景测试视频。测试算法识别率
实车测试阶段:将产品DEMO安装到车上进行测试,大多由主机厂和零部件供应商掌握
OTA远程升级测试
要求:升级速度快 数据传输准 升级过程稳 用户体验好
OTA升级流程: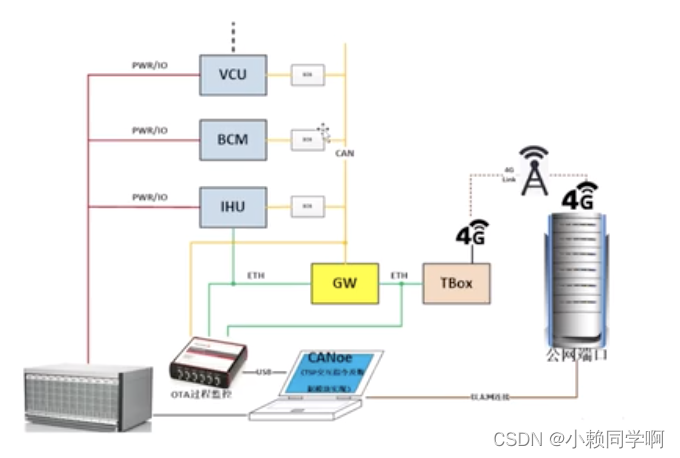
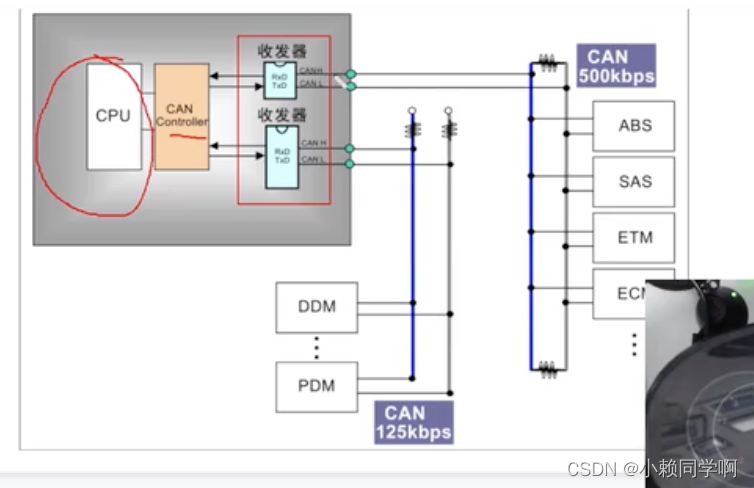
Can使用和介绍
Can协议总线协议是由BOSCH发明的一种消息广播模式的串行通信协议总线
Can总线解读:
特点:高性能 高可靠
can协议在结构中的位置,主要有can_H和can_L
can报文结构解读:

一个报文由以下部分构成
起始帧(SOF):
仲裁段(ID):
控制段(DLC)
数据段(DATA):
校验段:(CRC段)
ACK段:
结束段(EOF):
| 域段 | 域段名 | 位宽:bit | 描述 |
|---|---|---|---|
| 帧起始 | SOF(Start Of Frame) | 1 | 数据帧起始标志,固定为1bit显性('b0) |
| 仲裁段 | Identify(ID) | 11 | 本数据帧的 ID 信息, ID 信息的作用:① 如果同时有多个节点发送数据时,作为优先级依据(仲裁机制);② 目标节点通过 ID 信息来接受数据(验收滤波技术) |
| RTR | Remote Transmission Request BIT | 1 | RTR标识是否是远程帧(0,数据帧;1,远程帧),在数据帧里这一位为显性('b0) |
| IDE | Identifier Extension Bit | 1 | IDE用于区分标准格式与扩展格式,在标准格式中 IDE 位为显性(‘b0),在扩展格式里 IDE 位为隐性(’b1) |
| R0 | 保留位 | 1 | 1bit保留位,固定为1'b0 |
| DLC | data length | 4 | 由 4 位组成,MSB 先行(高位先行),它的二进制编码用于表示本报文中的数据段含有多少个字节,DLC 段表示的数字为0到8,若接收方接收到 9~15 的时候并不认为是错误 |
| 数据段 | data | 0~64 | 据帧的核心内容,它由 0~8 个字节(0 ~ 64位)组成,MSB 先行 |
| CRC段 | CRC | 15 | 段用于检查帧传输错误,发送方以一定的方法计算包括:帧起始、仲裁段、控制段、数据段;接收方以同样的算法计算 CRC 值并进行比较,如果不同则会向发送端反馈出错信息,重新发送;计算和出错处理一般由 CAN 控制器硬件完成或由软件控制最大重发数。 |
| CRC界定符 | 1 | CRC 界定符(用于分隔的位),为隐性位(1'b1),主要作用是把CRC 校验码与后面的 ACK 段间隔起来 | |
| ACK 槽 | ACK slot | 1 | 在 ACK 槽位中,发送端发送的为隐性位,而接收端则在这一位中发送显性位以示应答;发送 ACK/返回 ACK这个过程使用到回读机制,即发送方先在 ACK 槽发送隐性位后,回读到的总线上的电平为显性0,发送方才知道它发送成功了,不用重发 |
| ACK界定符 | 1 | 在 ACK 槽和帧结束之间由 ACK 界定符间隔开,为隐性位 | |
| 帧结束 | EOF | 7 | 由发送端发送 7 个隐性位表示结束 |
图为引用片段,引用位置:CAN总线协议_can协议_mustfeng的博客-CSDN博客
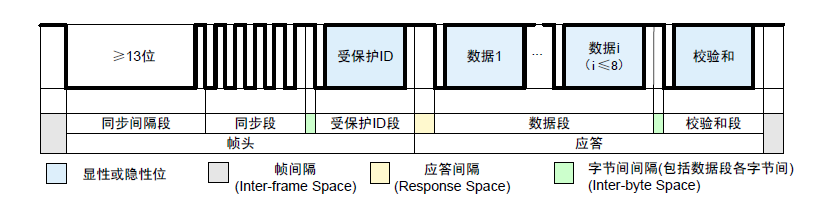
Lin协议
lin适用于可靠性不高 低成本使用场景
使用场景包括车窗 天窗 座椅 门锁....

can协议与lin协议沟通

lin协议构成





站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结