您现在的位置是:首页 >技术杂谈 >STM32物联网实战开发(4)——基本定时器网站首页技术杂谈
STM32物联网实战开发(4)——基本定时器
我使用的是正点原子的阿波罗F429开发板,他有14个定时器,本次实验使用STM32F429的基本定时器6作定时,在中断中每隔1秒翻转LED电平状态。
1.CubeMX初始化定时器
先开启定时器6

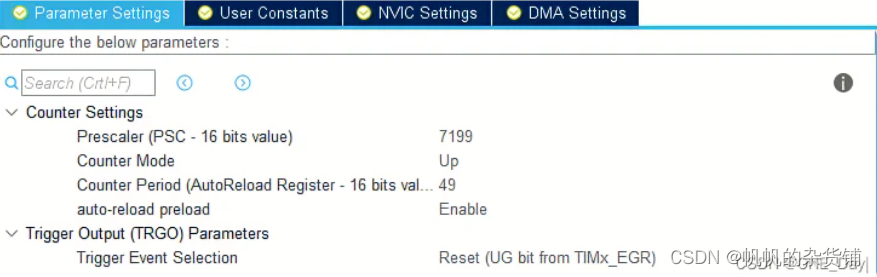
再对定时器6的参数进行配置,将定时器6定时时间配置为5ms,在中断中再累计到1秒钟(200次),实现LED翻转功能。
其中
Prescaler配置为7199,因为溢出时间 = ((psc+1)/fCK_PSC) * (arr+1),
fCK_PSC是72MHz,7199+1 = 7200,7200/72MHz = 7200/72000000Hz = 0.0001s = 0.1ms;Counter Period(装载值)配置为49,根据公式,(49+1)*0.1ms = 5ms
Counter Mode配置为Up,向上计数模式
开启NVIC,使能定时器6全局中断,抢占优先级和响应优先级都设为1,因为只有一个中断,所以这里设什么值没太大关系。(stm32单片机将抢占优先级和响应优先级,一共赋予四位,我们可以给抢占优先级和响应优先级各占两位,那么他们的优先级都是(0~3),其中优先级数字越小,优先级越大)

最后生成代码
2.keil代码编写
在CubeMX生成的工程中,多了tim.x和tim.h这两个文件,tim.c中就有定时器6的初始化函数,同时在main.c文件中也被自动调用,定时器6已经被初始化,但还没开启,要自己开启定时器
TIM_HandleTypeDef htim6;//就是定时器6的初始化句柄,类似结构体的用法/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim6;
/* TIM6 init function */
void MX_TIM6_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim6.Instance = TIM6;
htim6.Init.Prescaler = 7199;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 49;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
增加Timer6.c和Timer6.h文件
Timer6.h
定义定时时间的枚举类型,比如定时10ms是5ms的两倍,所以枚举值是2
#ifndef __TIMER6_H_
#define __TIMER6_H_
#include "MyApplication.h"
//定义定时时间枚举类型
typedef enum
{
TIMER_10ms = (uint16_t)2,
TIMER_50ms = (uint16_t)10,
TIMER_100ms = (uint16_t)20,
TIMER_200ms = (uint16_t)40,
TIMER_500ms = (uint16_t)100,
TIMER_1s = (uint16_t)200,
TIMER_2s = (uint16_t)400,
TIMER_3s = (uint16_t)600,
TIMER_5s = (uint16_t)1000,
TIMER_10s = (uint16_t)2000,
TIMER_3min = (uint16_t)3600,
}TIMER_Value_t;
//定义结构体类型
typedef struct
{
uint16_t volatile usMCU_Run_Timer; //系统运行定时器
void (*Timer6_Start_IT)(void);
}Timer6_t;
/* extern variables-----------------------------------------------------------*/
extern Timer6_t Timer6;
/* extern function prototypes-------------------------------------------------*/
#endif
/********************************************************
End Of File
********************************************************/
Timer6.c
源文件中对系统的定时器6以中断模式启动函数进行了封装
/* Includes ------------------------------------------------------------------*/
#include <MyApplication.h>
/* Private define-------------------------------------------------------------*/
/* Private variables----------------------------------------------------------*/
static void Timer6_Start_IT(void); //定时器6以中断模式启动
/* Public variables-----------------------------------------------------------*/
Timer6_t Timer6 =
{
0,
Timer6_Start_IT
};
/* Private function prototypes------------------------------------------------*/
/*
* @name Timer6_Start_IT
* @brief 定时器6以中断模式启动
* @param None
* @retval None
*/
static void Timer6_Start_IT()
{
HAL_TIM_Base_Start_IT(&htim6); //调用系统的定时器6以中断模式启动
}
/********************************************************
End Of File
********************************************************/
MyInit.c
自己定义的初始化函数中调用定时器6的启动函数
/*
* @name Peripheral_Set
* @brief 外设设置
* @param None
* @retval None
*/
static void Peripheral_Set()
{
Timer6.Timer6_Start_IT(); //启动定时器6
}
Peripheral_Set函数在main.c中被调用,进入while循环前已将定时器6初始化,并启动。
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM6_Init(); //初始化定时器6,系统自动生成
/* USER CODE BEGIN 2 */
MyInit.Peripheral_Set(); //自己的初始化函数,调用定时器6启动函数
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
System.Run();//Run函数中不用写任何代码,因为定时器是中断触发的
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
CallBack.c
在回调文件中重写HAL_TIM_PeriodElapsedCallback函数,该函数是定时器的中断回调函数,重写后,调用的就是下面这个让LED灯电平翻转的函数,并不是系统原本的空函数(弱函数,没有实际的功能)
Timer6.usMCU_Run_Timer在结构体中被初始化为0,因为1s等于200*5ms,当Timer6.usMCU_Run_Timer大于200时,就完成了定时1秒,然后就让LED灯电平翻转
(其中usMCU_Run_Timer被volatile修饰代表他是一个随时变化的变量)
因为该函数是中断回调函数,所以不需要在主函数中调用,定时器溢出后便会自动到该函数处执行。(所以不用再Run函数中调用)
/*
* @name HAL_TIM_PeriodElapsedCallback
* @brief 定时器中断回调函数
* @param *htim:处理定时器的结构体指针
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == htim6.Instance)//判断是否为定时器6
{
//定时器6每隔5ms进入一次中断,usMCU_Run_Timer就加1,当计时时间达到1s时,翻转LED灯的状态
if(++Timer6.usMCU_Run_Timer >= TIMER_1s)
{
Timer6.usMCU_Run_Timer = 0;
LED.LED_Fun(LED1,LED_Flip);
LED.LED_Fun(LED2,LED_Flip);
LED.LED_Fun(LED3,LED_Flip);
}
}
}
HAL_TIM_PeriodElapsedCallback函数体在stm32f4xx.hal_tim.c文件中被定义,_weak修饰了函数,说明这个函数是个弱函数,当没有被重构时,如果函数被调用,调用的是系统的这个没有具体功能的函数体,因为生成的代码并不知道开发者要干嘛,所以是个空函数;当该函数被重构后,调用的就是开发者重构后的函数
/**
* @brief Period elapsed callback in non-blocking mode
* @param htim TIM handle
* @retval None
*/
__weak void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(htim); /* NOTE : This function should not be modified, when the callback is needed,
the HAL_TIM_PeriodElapsedCallback could be implemented in the user file
*/
}
总结
综上所述,我们明白啦,利用了HAL库,已经帮我们生成了大部分的代码,我们只需要定义一个结构体(一个变量,一个函数指针(用来打开定时器))。后期只需要调用结构体就可实现定时的功能,最后我们还需要写一个回调函数来实现我们想要实现的功能,因为hal中已经构建了一个弱函数,我们只需要重新构建一个同名的函数即可(定时器中断函数大功告成)。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结