您现在的位置是:首页 >其他 >【记录】ORB_SLAM2 例程(README文件里的单双目RDB-D、ROS、AR、外接摄像头、点云)网站首页其他
【记录】ORB_SLAM2 例程(README文件里的单双目RDB-D、ROS、AR、外接摄像头、点云)
第一次跑 ORB_SLAM2,记录一下
建议结合另一篇一起看:【收获】第一次跑 ORB_SLAM2 例程的收获
需要仔细读一读官方提供的README,有很多有用的信息
一、普通环境
0.build.sh 遇到的问题
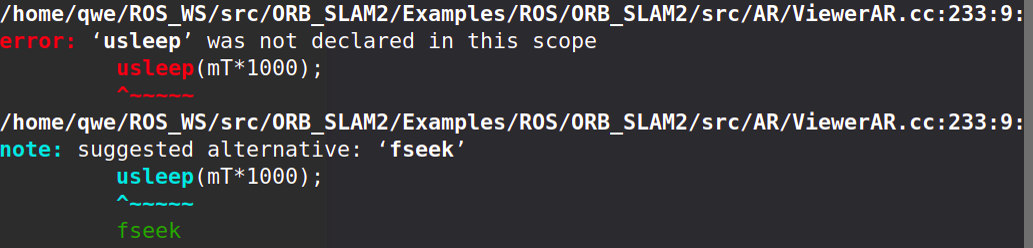
(1)usleep
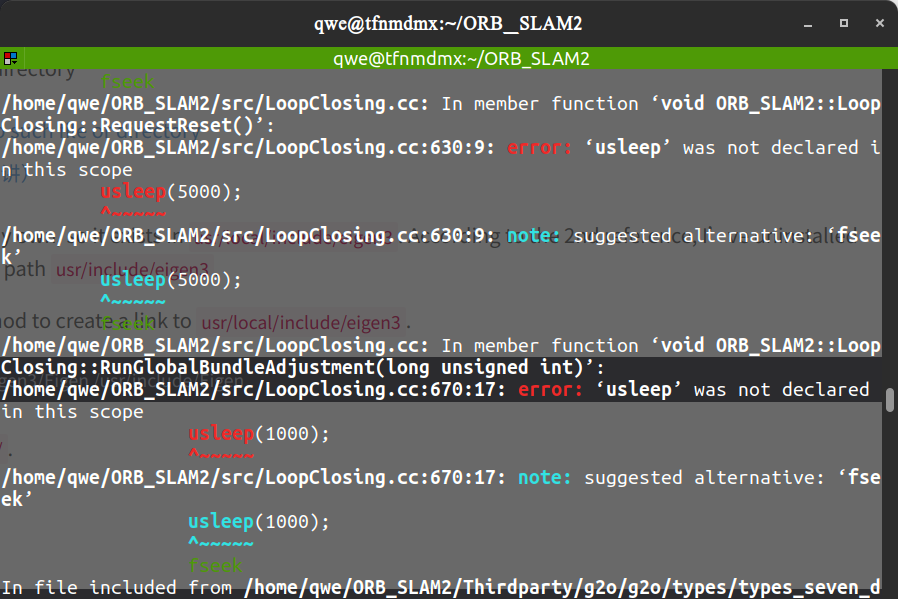
https://zhuanlan.zhihu.com/p/411027681
解决方案:在报错的文件里添加 #include <unistd.h>
我的是这两个:
/home/qwe/ROS_WS/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ViewerAR.cc
/home/qwe/ROS_WS/src/ORB_SLAM2/src/LoopClosing.cc
(2)AlignedBit
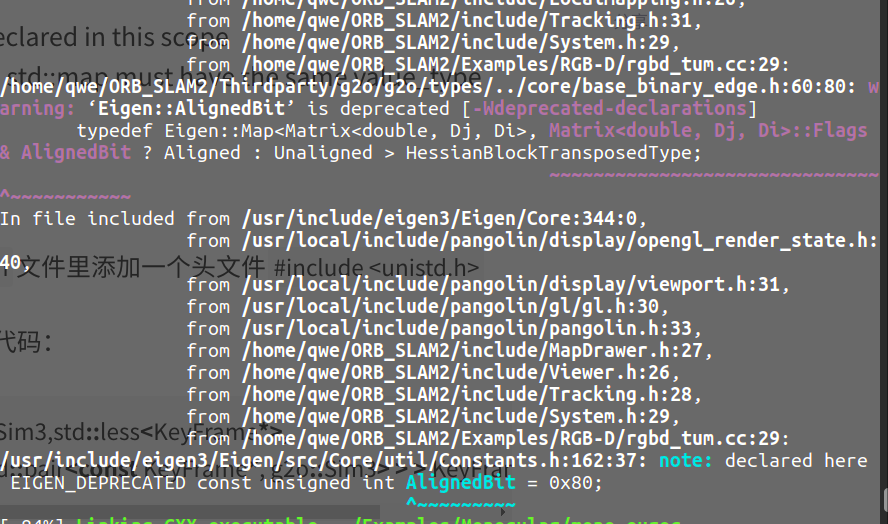

https://blog.csdn.net/chenzz444/article/details/121406471
查看eigen版本
pkg-config --modversion eigen3
解决方案:重装eigen 3.2.1
sudo rm -rf /usr/include/eigen3
# 进入到下载完的eigen3.2.1目录下执行
mkdir build
cd build
sudo make install
# 进入到原来的Pangolin-0.6目录下执行
sudo rm -rf ./build
mkdir build
cd build
cmake ..
sudo make install
# 这样Pangolin也重新编译好了
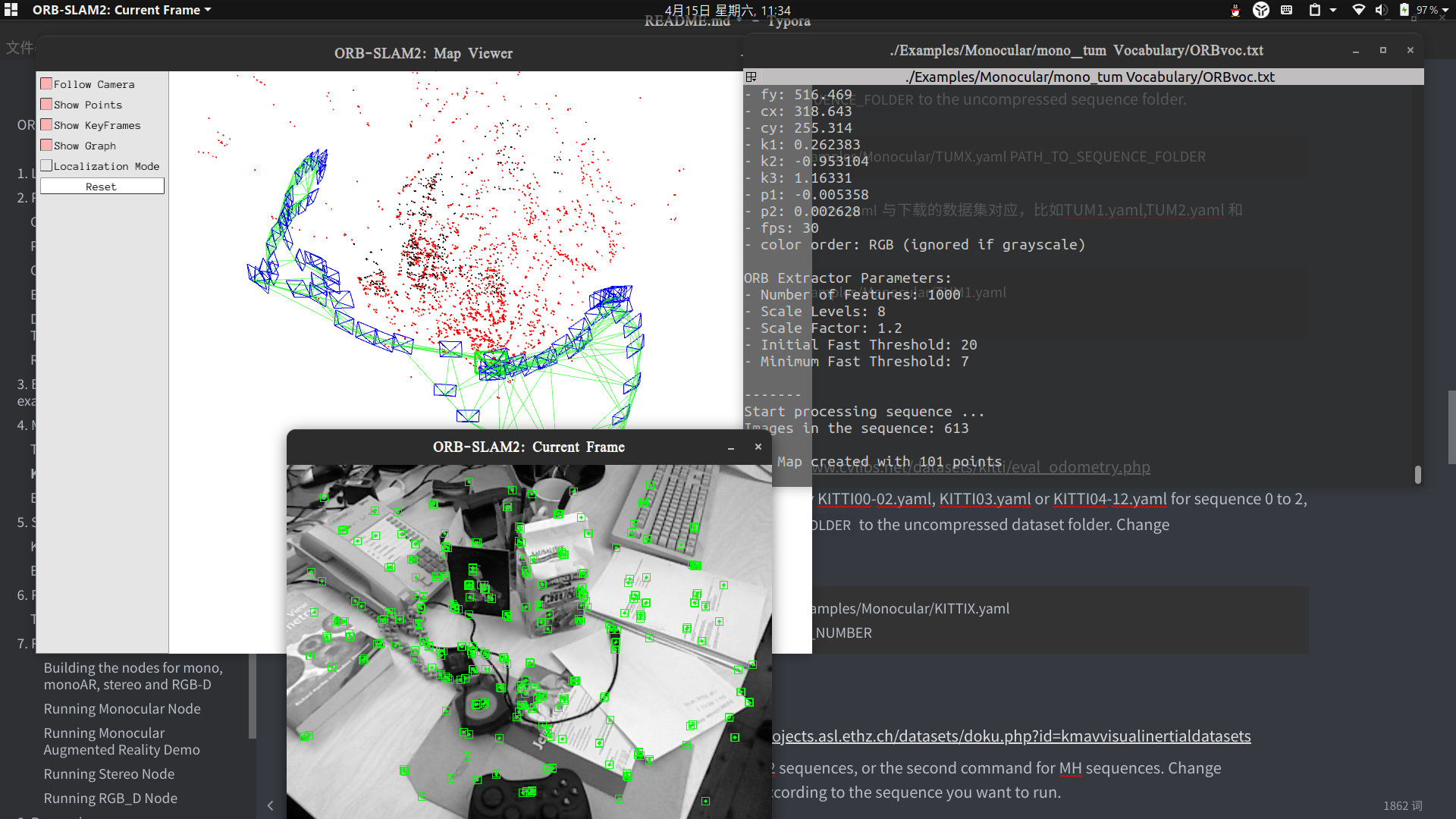
1.单目、TUM数据集
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
其中PATH_TO_SEQUENCE_FOLDER为数据集的存储路径,并将tumx.yaml与下载的数据集对应,比如TUM1.yaml,TUM2.yaml和TUM3.yaml 分别对应 freiburg1, freiburg2 和 freiburg3。
这句话是说,你需要改的部分是TUMX.yaml的X以及最后的数据集路径。
X与后面的freiburgX对应。
例如:
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml
./Examples/data/rgbd_dataset_freiburg1_desk
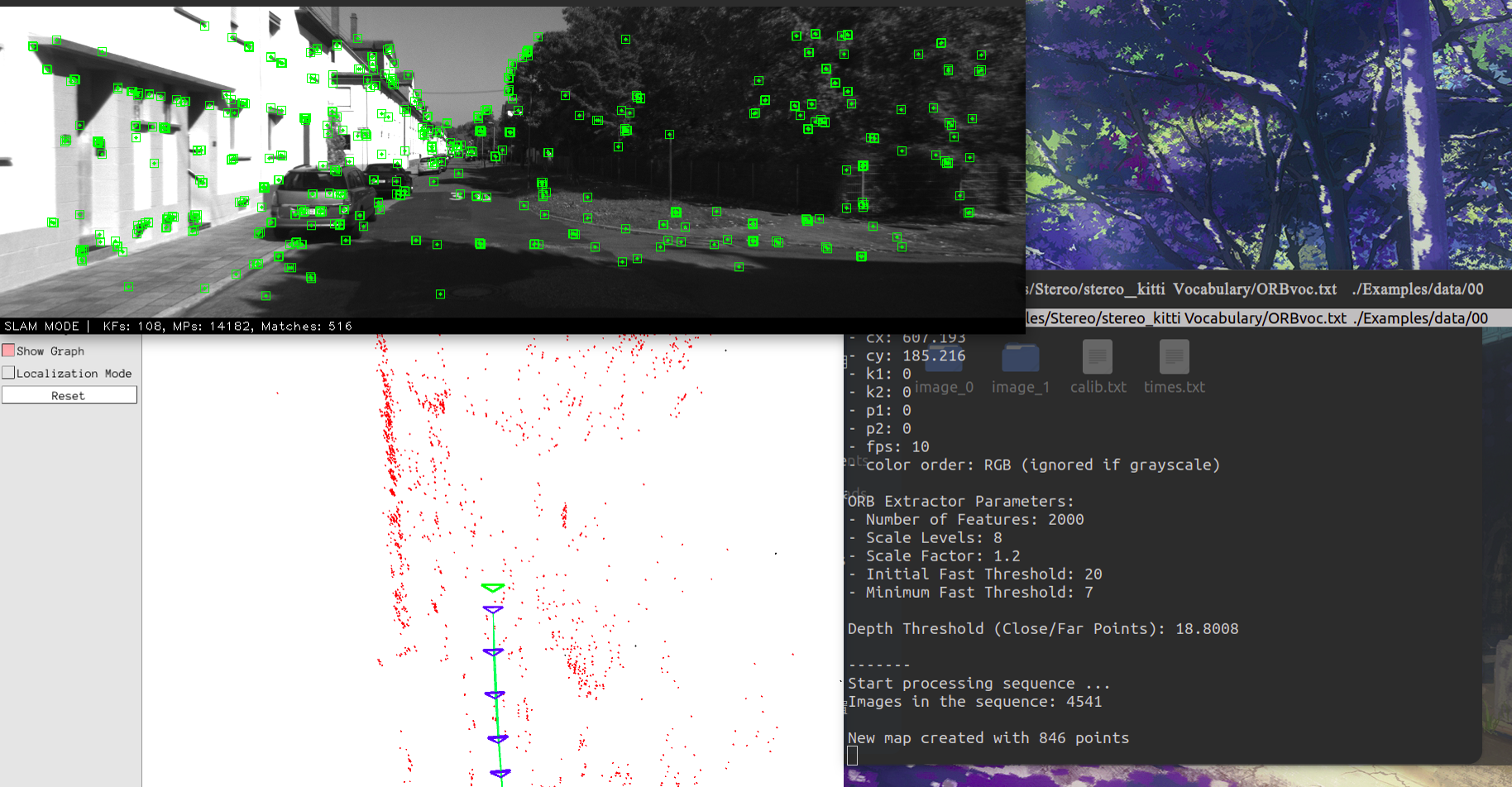
2.双目、KITTI数据集
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml ./Examples/data/00
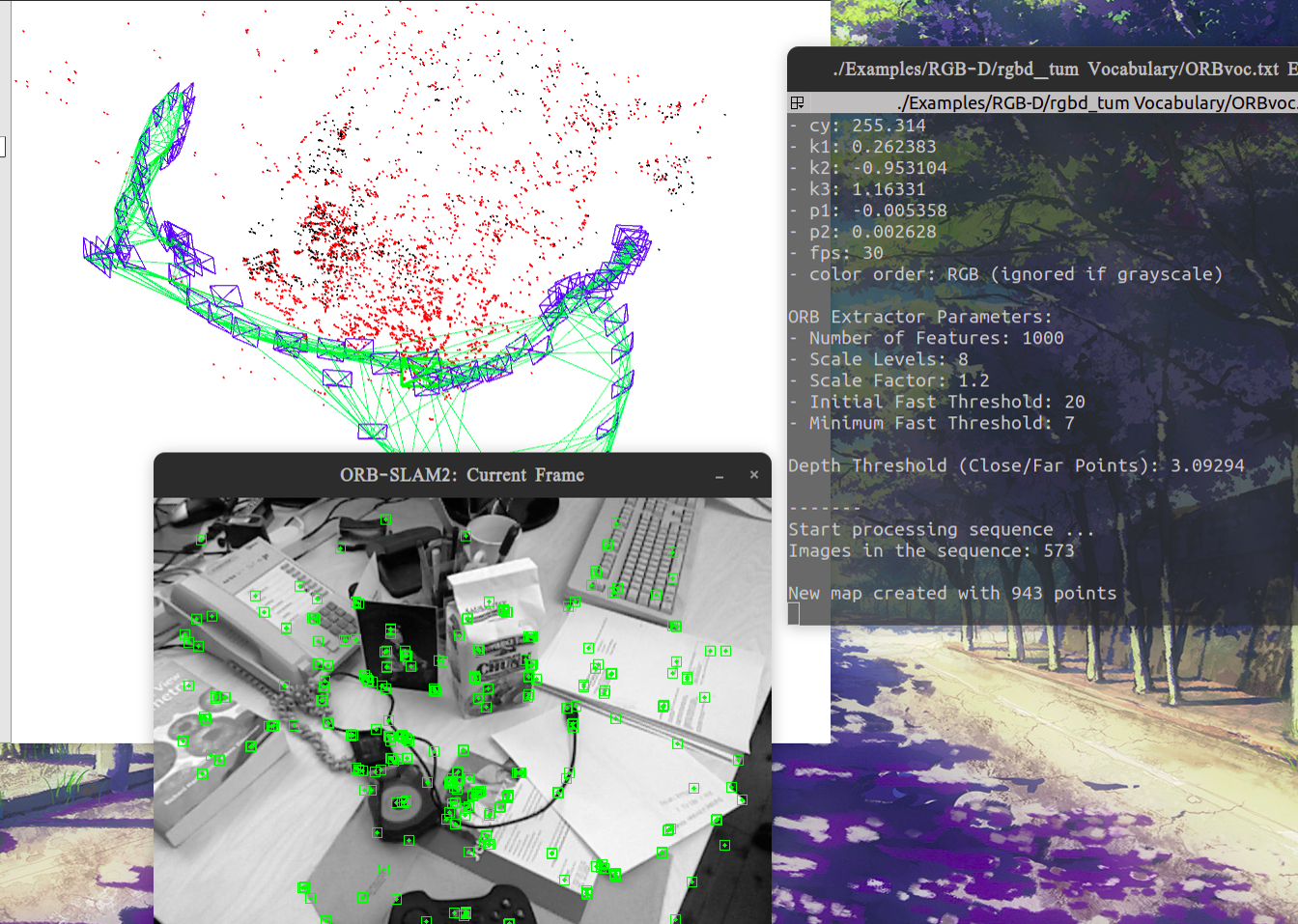
3.RGB-D、TUM数据集
https://blog.csdn.net/xyt723916/article/details/89374201
这里官方提供了关联文件,所以不用自己再关联一遍
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml ./Examples/data/rgbd_dataset_freiburg1_desk ./Examples/RGB-D/associations/fr1_desk.txt
二、ROS
ORB_SLAM2 ROS运行KITTI数据集
https://blog.csdn.net/learning_tortosie/article/details/79881165
1.使用ROS创建workspace
mkdir -p ~/catkin_orb_slam2_ws/src
cd ~/catkin_orb_slam2_ws/
catkin_make
2.将ORB-SLAM2项目移动到catkin_orb_slam2_ws/src
3.将包含Examples/ROS/ORB_SLAM2的路径添加到ROS_PACKAGE_PATH环境变量中。
sudo gedit ~/.bashrc
打开.bashrc文件并在最后添加以下行(注意改路径):
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:路径/ORB_SLAM2/Examples/ROS
source ~/catkin_orb_slam2_ws/devel/setup.bash
使生效
source ~/.bashrc
4.编译ROS下的ORB-SLAM2
cd ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh
建议先./build.sh
再./build_ros.sh
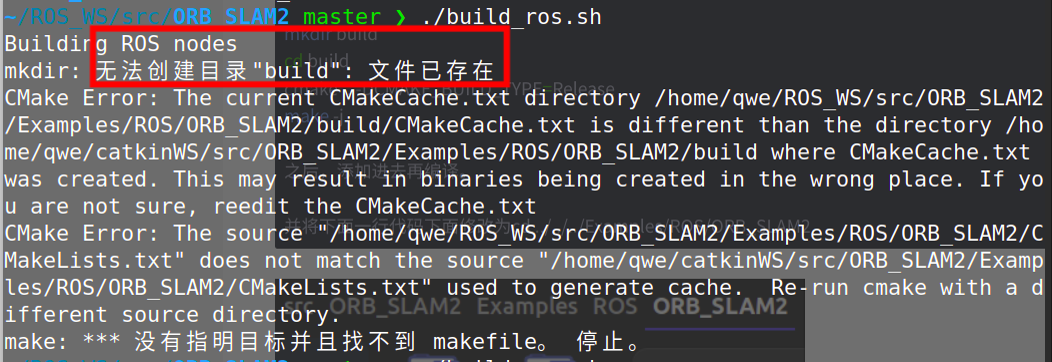
0.build_ros.sh 遇到的问题
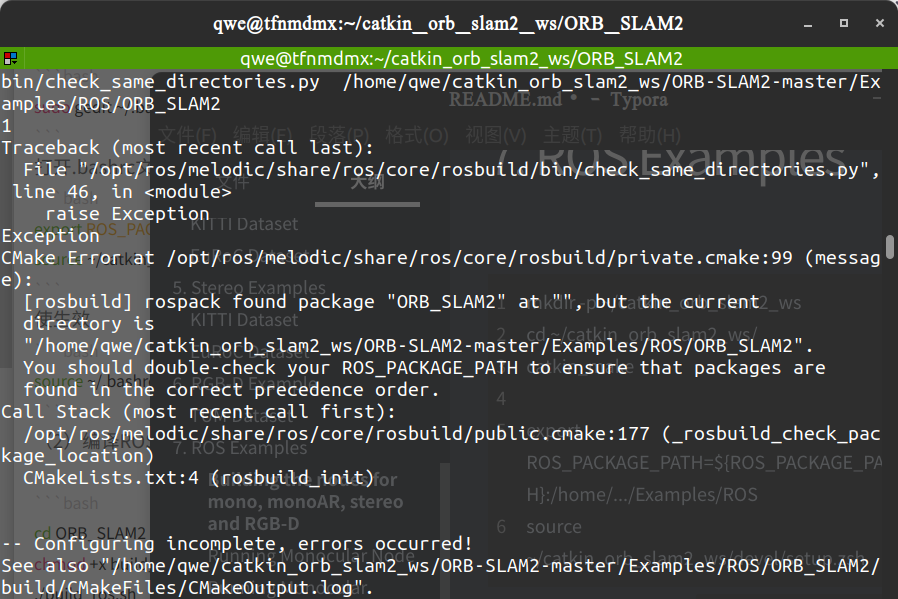
(1)rospack found package “ORB_SLAM2” at “”, but the current directory is “xxxx”
报以下错误:大概是软链接的问题
我当时的解决方案是重建了文件夹,然后重新clone了一遍SLAM
现在我觉得是source的问题,bashrc里面配置的路径没有生效
source ~/catkin_orb_slam2_ws/devel/setup.bash
source ~/.bashrc
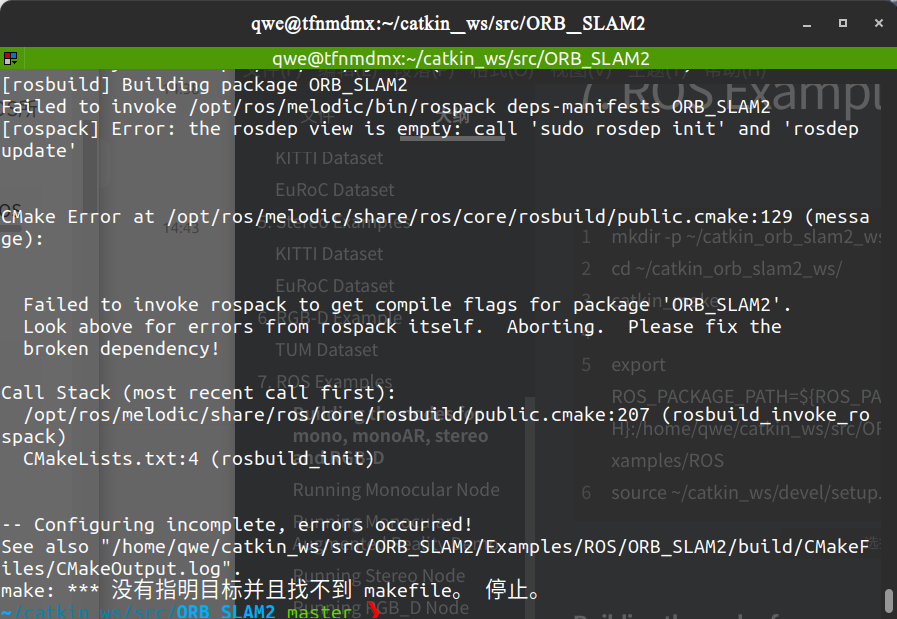
(2)the rosdep view is empty
按图中提示,运行
sudo rosdep init
rosdep update
(3)…/…/config.h:没有那个文件或目录
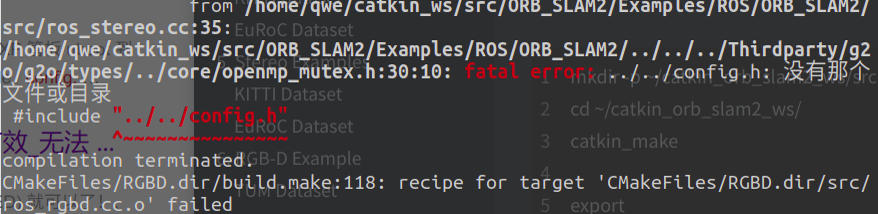
g2o没有编译好,不建议用下面的方法,能解决当下的问题,但是还会有别的问题
建议先./build.sh,再./build_ros.sh
https://blog.csdn.net/yu_2054/article/details/88700874

echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../../
echo "Building ROS nodes"
cd Examples/ROS/ORB_SLAM2
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make -j
(4)CMake Error:The current CMakeCache.txt directory xxxx is different than the directory xxx
删除如下build文件
(5)recipe for target ‘CMakeFiles/xxx.dir/all’ failed
make[2]: *** 没有规则可制作目标“../../../../lib/libORB_SLAM2.so”,由“../RGBD” 需求。 停止。
make[2]: *** 正在等待未完成的任务....
[ 11%] Building CXX object CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o
make[2]: *** 没有规则可制作目标“../../../../lib/libORB_SLAM2.so”,由“../Mono” 需求。 停止。
make[2]: *** 没有规则可制作目标“../../../../lib/libORB_SLAM2.so”,由“../Stereo” 需求。 停止。
make[2]: *** 正在等待未完成的任务....
make[2]: *** 正在等待未完成的任务....
[ 33%] Building CXX object CMakeFiles/Mono.dir/src/ros_mono.cc.o
[ 33%] Building CXX object CMakeFiles/Stereo.dir/src/ros_stereo.cc.o
make[2]: *** 没有规则可制作目标“../../../../lib/libORB_SLAM2.so”,由“../MonoAR” 需求。 停止。
make[2]: *** 正在等待未完成的任务....
[ 44%] Building CXX object CMakeFiles/MonoAR.dir/src/AR/ros_mono_ar.cc.o
[ 55%] Building CXX object CMakeFiles/MonoAR.dir/src/AR/ViewerAR.cc.o
CMakeFiles/Makefile2:397: recipe for target 'CMakeFiles/Mono.dir/all' failed
make[1]: *** [CMakeFiles/Mono.dir/all] Error 2
make[1]: *** 正在等待未完成的任务....
CMakeFiles/Makefile2:594: recipe for target 'CMakeFiles/MonoAR.dir/all' failed
make[1]: *** [CMakeFiles/MonoAR.dir/all] Error 2
CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/RGBD.dir/all' failed
make[1]: *** [CMakeFiles/RGBD.dir/all] Error 2
CMakeFiles/Makefile2:104: recipe for target 'CMakeFiles/Stereo.dir/all' failed
make[1]: *** [CMakeFiles/Stereo.dir/all] Error 2
Makefile:129: recipe for target 'all' failed
make: *** [all] Error 2
网上的解决分方法都是在Examples/ROS/ORB_SLAM2/文件夹下的CMakeLists.txt文件加-lboost_system,然而我加了却解决不了,这里卡了很长时间:
https://blog.csdn.net/YiYeZhiNian/article/details/108270337
报错的意思是libORB_SLAM2.so文件找不到,所以需要这个文件的那些都失败了
解决方法:在ORB_SLAM2文件夹下直接运行编译命令,这时候会生成一个lib文件夹,libORB_SLAM2.so就在这个文件夹下。
与问题(3)中的建议相同,不建议单个编译,而是先./build.sh再./build_ros.sh,一劳永逸。
最后结论是,只要先./build.sh
再./build_ros.sh 就解决了大部分问题。
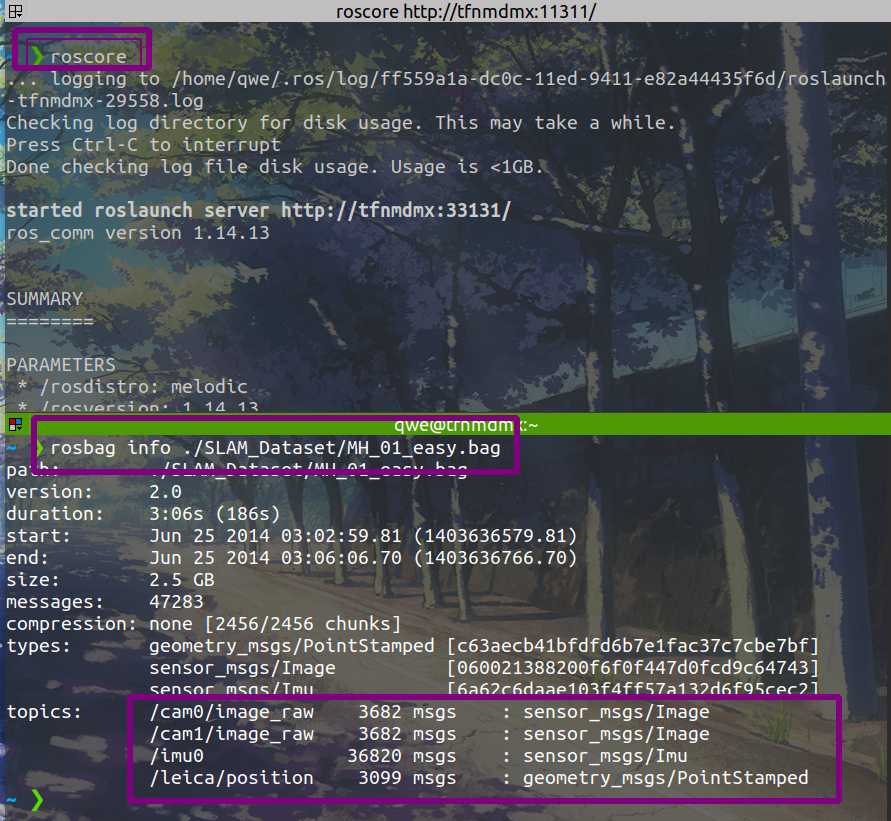
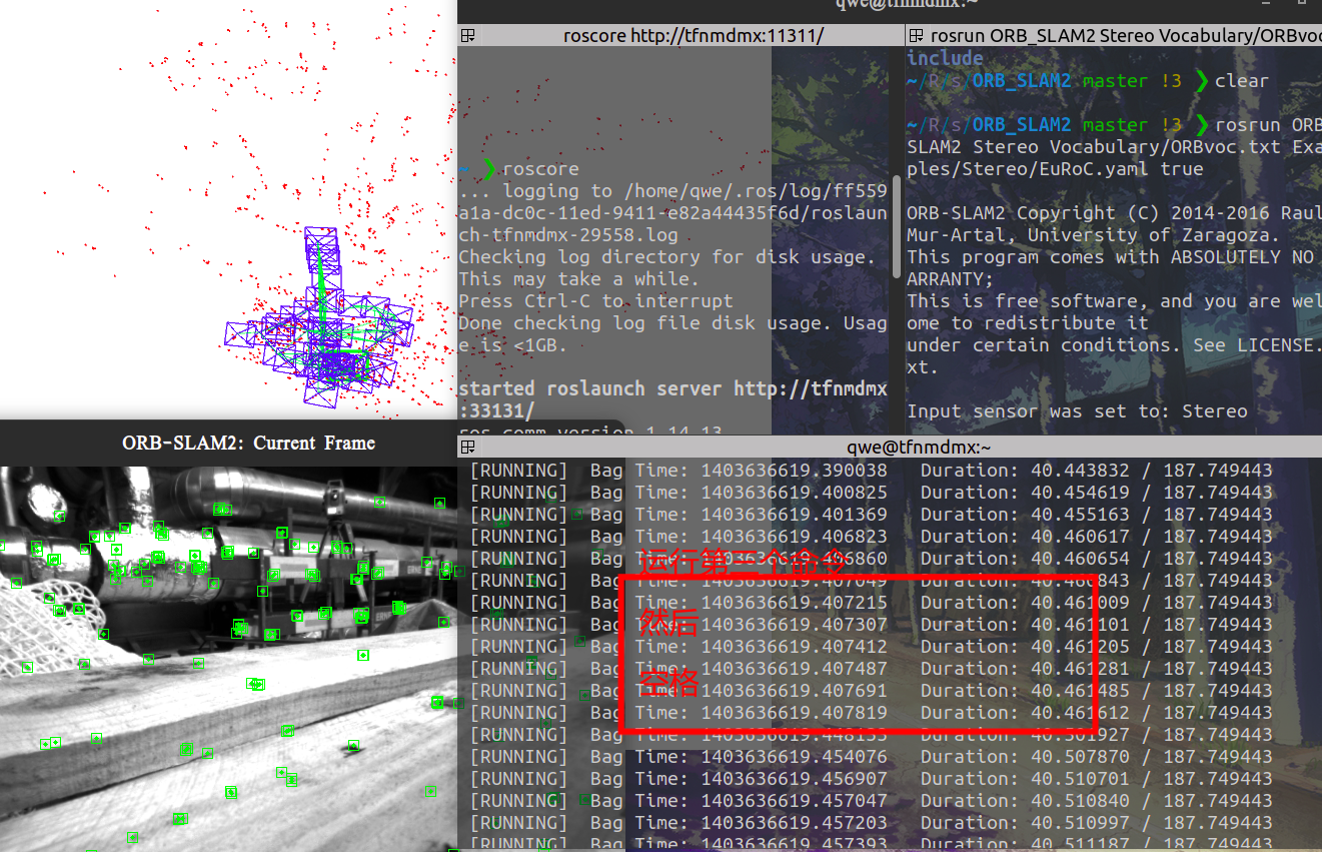
1.双目、EuRoC 数据集对应的 rosbag
ORB SLAM 2 demo 复现(普通模式 + ROS 模式)
EuRoC 数据集对应的 rosbag,包含如下的 topic:
/cam0/image_raw 3682 msgs : sensor_msgs/Image /cam1/image_raw 3682 msgs : sensor_msgs/Image /imu0 36820 msgs : sensor_msgs/Imu /leica/position 3099 msgs : geometry_msgs/PointStamped其中关键的 topic 是左右两个摄像头的数据
/cam0/image_raw 和 /cam1/image_raw而双目 rosnode Stereo 接收的 topic 分别为
/camera/left/image_raw 和 /camera/right/image_raw
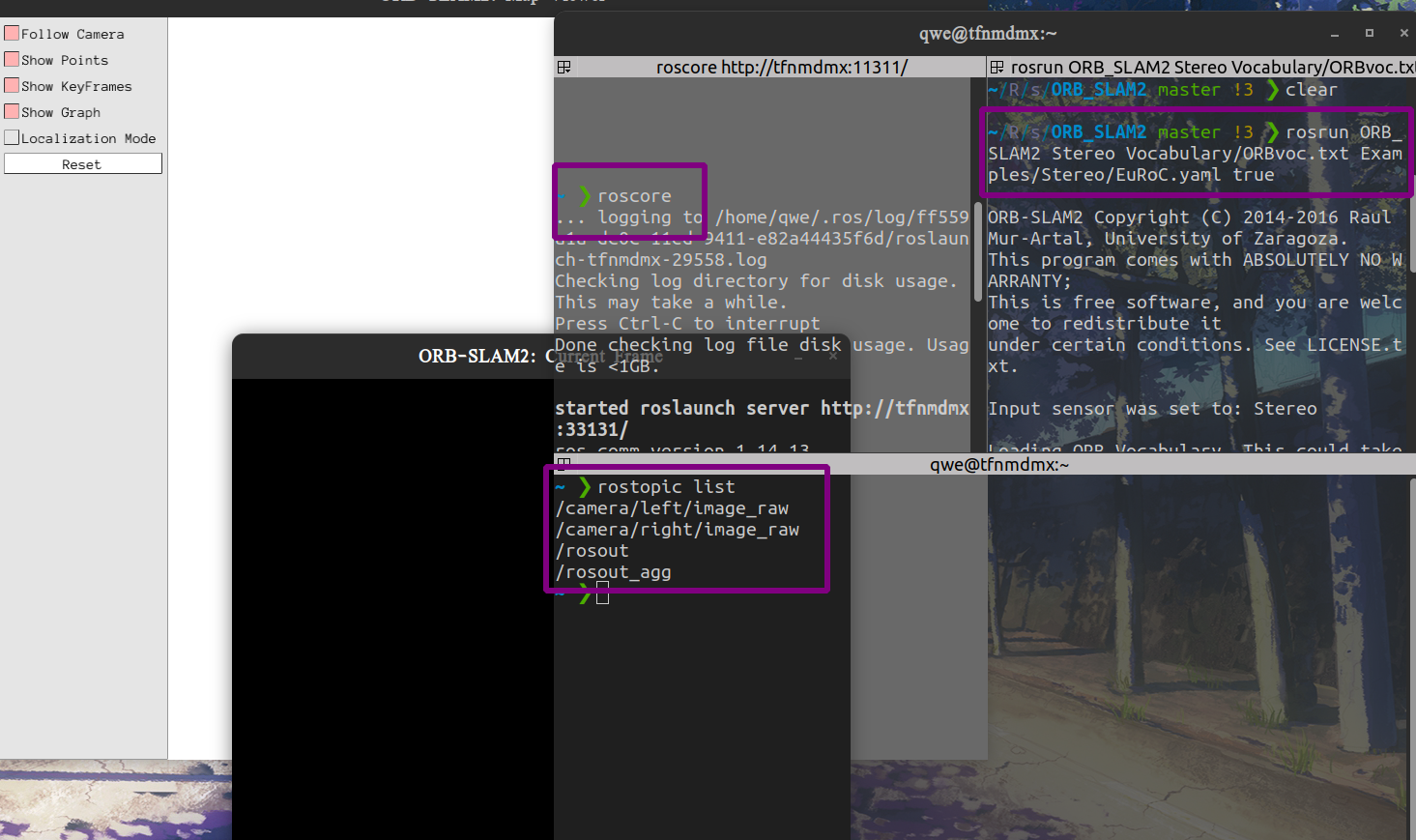
因此在运行时需要转换一下 topic 名称:/cam0/image_raw:=/camera/left/image_raw。完整命令如下:
roscore rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true rosbag play --pause MH_01_easy.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw
roscore
rosbag info xxx.bag
(2)如何知道rosnode Stereo 接收的 topic ?
2.单目、AR
ORB SLAM 2 demo 复现(普通模式 + ROS 模式)
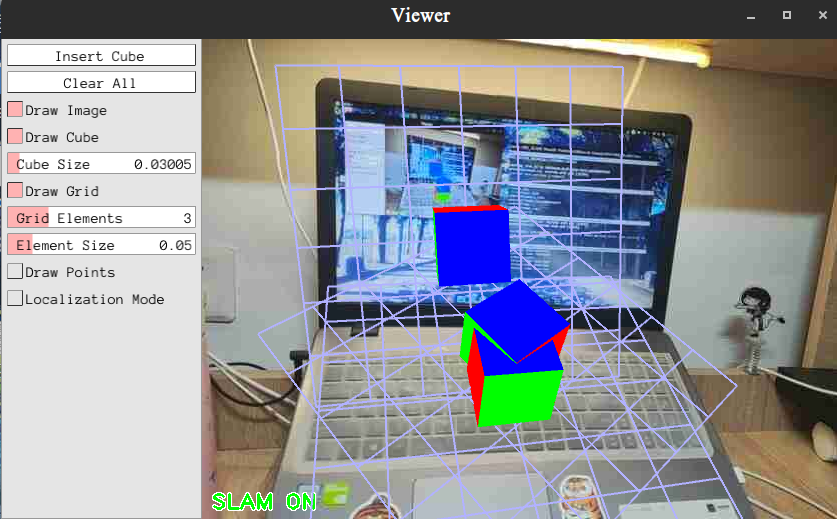
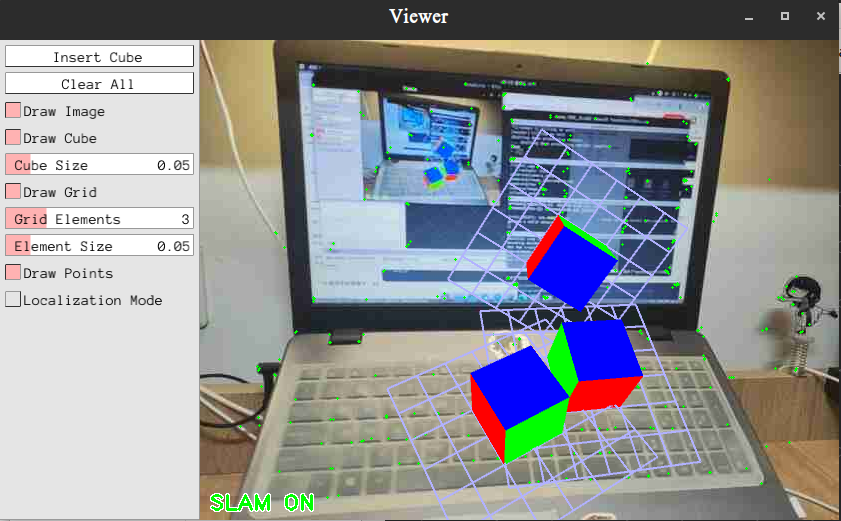
实现增强现实效果,可以向摄像头中的世界插入一个虚拟立方体,通过摄像头观察,这个虚拟立方体与实际物体相仿。roscore rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml rosbag play datasets/rgbd_dataset_freiburg1_xyz.bag /camera/rgb/image_color:=/camera/image_raw
这里是跑数据集,然后放置虚拟立方体,就不运行这个了,我在下下部分实现连接手机摄像头,实时放置
3.笔记本摄像头、AR
如果出现报错“sh: 1: v4l2-ctl: not found”则需要安装v4l2
运行:sudo apt-get install v4l-utils
以下括号里的是我当时遇到的情况
1.在ROS工作区src目录下(1.在roscore启动时不能gitclone,2.把后面的.git去掉才行)
git clone https://github.com/bosch-ros-pkg/usb_cam.git
2.退出 src 目录运行 catkin_make 并配置运行环境
cd ..
catkin_make
source devel/setup.bash
(source之后,可以在任意目录使用roslaunch usb_cam usb_cam.launch,不然需要cd到launch目录)
3.使用自定义 launch 文件设置摄像头
(我下载的里边有usb_cam.launch和usb_cam-test.launch)
(usb_cam-test.launch是usb_cam.launch的链接文件,usb_cam.launch被改变的话usb_cam-test.launch也会改变)
(我下载后的文件和以下内容不太一样)
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
4.运行
(我用rosrun usb_cam usb_cam_node运行,不出现画面那个弹窗,但是摄像头是开启状态,也可以跑monoAR(monoAR自已有弹窗))
roslaunch usb_cam usb_cam.launch
此时摄像头开启
5.编译ROS下的ORB-SLAM2
ORB-SLAM默认订阅的话题为/camera/image_raw,而usb_cam节点发布的话题为/usb_cam/image_raw,因此需要在ros_mono_ar.cc中修改订阅的话题。
文件路径:/home/qwe/ROS_WS/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ros_mono_ar.cc
ros::Subscriber sub = nodeHandler.subscribe("/camera/image_raw", 1, &ImageGrabber::GrabImage,&igb);
//根据rostopic,应该改成下面的代码
ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
./build_ros.sh
roslaunch usb_cam usb_cam-test.launch
rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
刚开始的初始化好难,找不到规律,有时候一直不初始化,有时候晃一晃就成功了,太奇怪了。
因为电脑太重了,搬着对着桌子实在太累,所以下一部分,连接手机摄像头,再试试实现monoAR
试完回来发现,初始化并不是很难,难是因为有问题,我之后成功的几次都是几十秒就ok的,猜测一下这里的问题:应该是我笔记本摄像头的分辨率太低了,硬件不给力
另外,在开始时,选择特征纹理丰富的区域,多上下左右平移相机,有利于初始化。
4.连接手机摄像头、AR
1.连接手机摄像头
Android_Camera-IMU原作者的:ROS实时采集Android的图像和IMU数据
这个写的很详细,强烈推荐看一看,我的就略写了
git clone https://github.com/hitcm/Android_Camera-IMU.git
sudo apt-get install ros-melodic-imu-tools # 按实际安装indigo、Kinetic 等安装对应的工具包
apk安装到手机
ip a
查看电脑ip,填到app首页locolhost,点击connect
roscore
cd Android_Camera-IMU
roslaunch android_cam-imu.launch
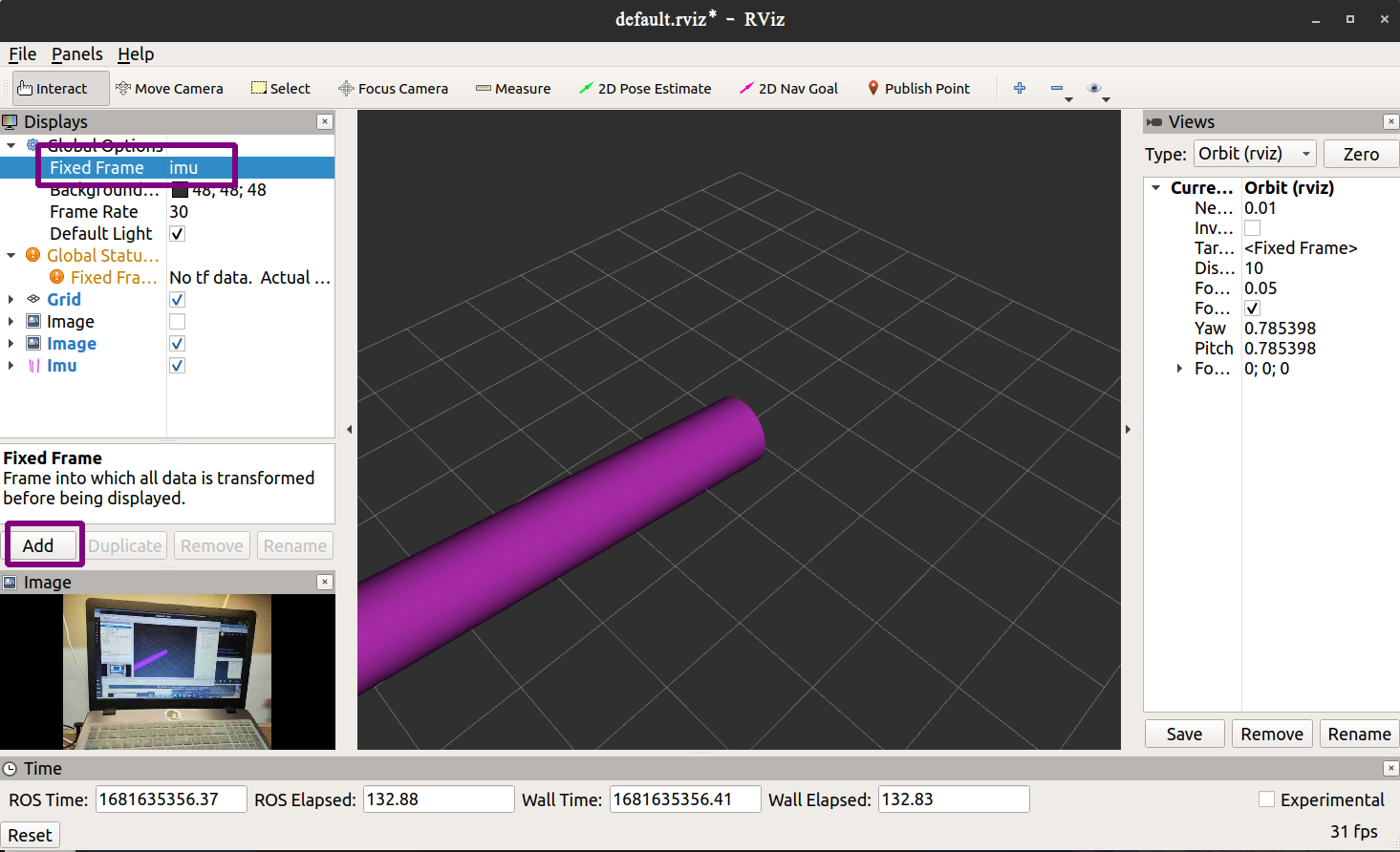
会弹出一个Rviz界面,如果要实时显示则:
如果要实时显示 image,需要 Add - By topic -添加/camera/image_raw/image。
如果要显示 imu,则需要 Add - By topic - 添加 imu,且在 Fix Frame 中 将 map 改为 imu。
2.标定之前在slam14讲里做过,这里省略
(建议不想做这一步的先跳过这一步,我标定完反而不能运行demo(貌似是因为畸变参数有问题))
2.1采集并保存摄像头图像
2.1.1在 ros_mono.cc 同一目录下写了个 ros_camera_capture.cc
2.1.2在 ORB_SLAM2/Examples/ROS/ORB_SLAM2 目录中的 CMakeLists.txt 中添加如下内容
2.1.3编译运行,按q保存图片
./build_ros.sh
roscore
roslaunch android_cam-imu.launch(可以关掉 Rviz)
rosrun ORB_SLAM2 CameraCapture
2.2标定
2.2.1修改 VID5.xml 图片路径
2.2.2修改 in_VID5.xml 配置文件
2.2.3编译运行
mkdir build
cd build
cmake ..
make
./Camera_Calibration ../in_VID5.xml
2.3标定结果:
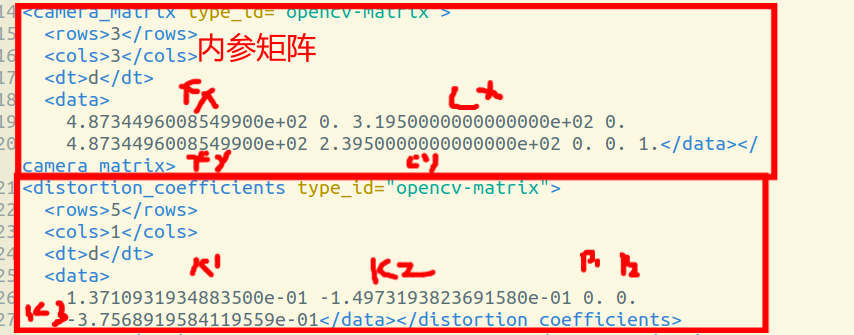
<camera_matrix type_id=“opencv-matrix”> 是相机内参矩阵,顺序为 fx, 0, cx; 0, fy, cy; 0, 0, 1。
<distortion_coefficients type_id=“opencv-matrix”> 是畸变参数,其顺序为 k1, k2, p1, p2, k3。
3.改yaml文件,自己新建一个mycam.yaml,复制TUM1.yaml的内容,并修改相机参数和畸变参数。
4.改 topic,手机摄像头的是/android/image_raw/compressed(不用改)
在运行时,一个关键的设置是将 slam node 接收的 ros topic 和 rosbag 发布的 ros topic
匹配起来,也就是收、发双方的 ros topic 名字必须相同.topic 名字的转化既可以在运行 slam node 时设置,格式为
rosrun <package_name> <node_name> original_topic:=new_topic
也可以在play rosbag 的时候设置,格式为
rosbag play <bag_name> original_topic:=new_topic
https://www.jianshu.com/p/31c95d9a5f97
之前用电脑摄像头的时候是在文件里改的,我这次在文件里改,不知道为啥,没有弹窗出来,运行卡住了,所以采用了上面这种方法,使用
roslaunch android_cam-imu.launch /android/image_raw/compressed:=/camera/image_raw
后来试了试直接这样也行(注意这里我已经把ros_mono_ar.cc里的topic改回去了,没改过的就不用管)
roslaunch android_cam-imu.launch
仔细想了想,发现手机摄像头也有/camera/image_raw这个topic,所以不用改
5.运行demo,注意改最后的yaml文件
rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/mycam.yaml
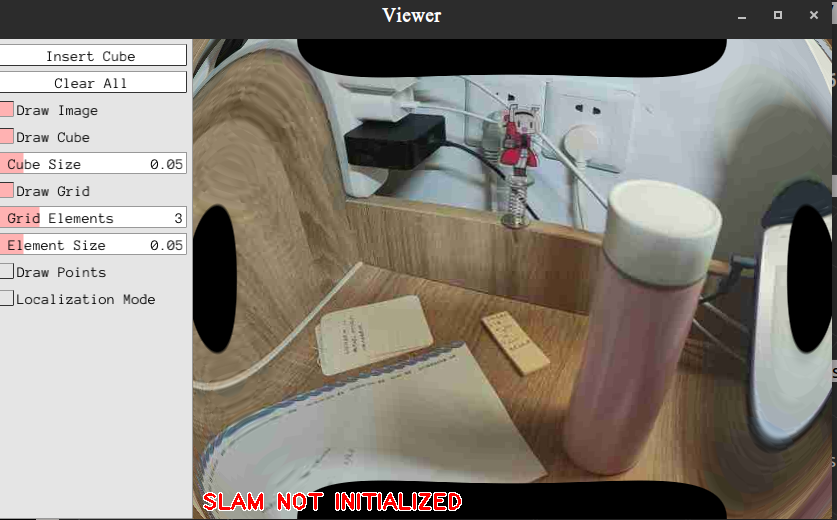
心好累,标定了两次,以为是我标定的有问题,但是两次都不能正确初始化(SLAM NOT INITIALIZED),然后就试了试不用自己的标定,一下子就成功了 ORZ
自己标定矫正后的图太畸形了,猜测是畸变系数有问题,所以把畸变系数都置0,也能正确运行出结果
Asus是自带的内参文件,需要修改,为什么只改相机参数,不改畸变参数呢?
所以总结一下这部分,虽然我写的长(说明我当时很懵),但其实归根到底,只用下面这些,就可以跑出来效果
git clone https://github.com/hitcm/Android_Camera-IMU.git
sudo apt-get install ros-melodic-imu-tools # 按实际安装indigo、Kinetic 等安装对应的工具包
apk安装到手机
ip a # 查看电脑ip,填到app首页locolhost,点击connect
roscore #终端 1
roslaunch android_cam-imu.launch # 终端 2 ,gitclone的目录,运行后有 Rviz 界面
rosrun ORB_SLAM2 MonoAR Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml # 终端3,ORB_SLAM2
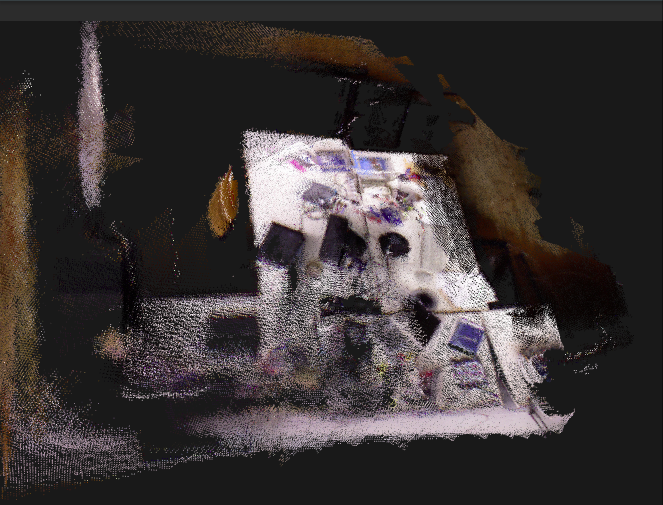
三、点云
最后再跑一跑高博修改的ORB_SLAM2,增加了点云输出
压缩包里的没跑出来,g2o的问题


之后参照这个跑了ORB_SLAM2_modified
高翔ORB-SLAM2稠密建图编译






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结