您现在的位置是:首页 >学无止境 >如何系统的学习robo-gym网站首页学无止境
如何系统的学习robo-gym
提醒:以下内容仅做参考,可自行发散。在发布作品前,请把不需要的内容删掉。
无论是初学者还是有经验的专业人士,在学习一门新的IT技术时,都需要采取一种系统性的学习方法。那么作为一名技术er,你是如何系统的学习it技术的呢。
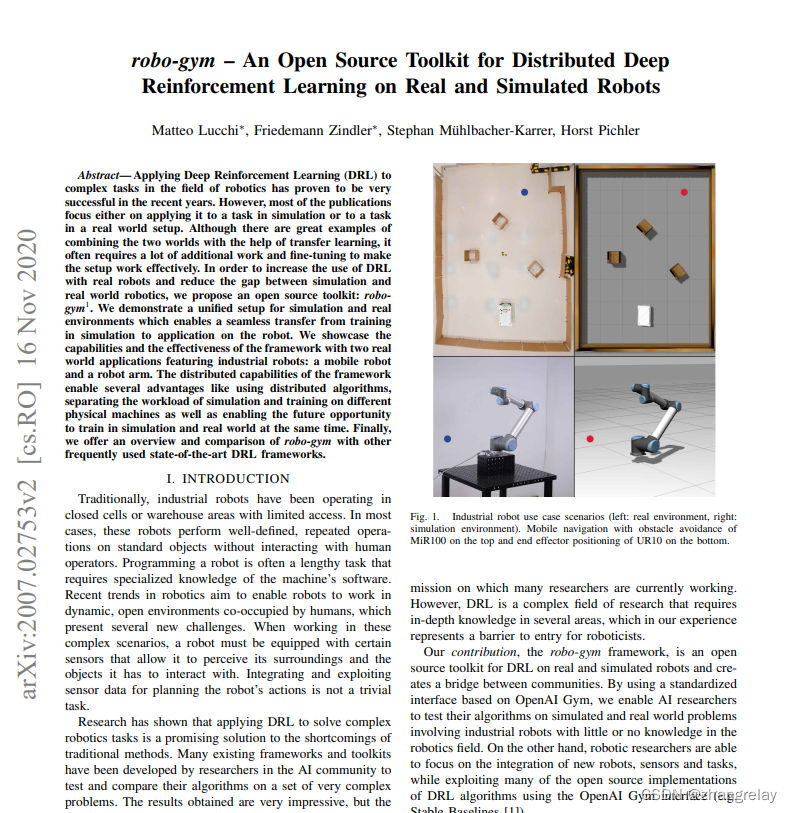
近年来,将深度强化学习(DRL)应用于机器人领域的复杂任务已经证明是非常成功的。然而,大多数出版物要么专注于在模拟中应用它,要么专注于在现实世界中应用它。尽管有很好的例子表明,借助迁移学习将两个世界结合起来,但通常需要大量的额外工作和微调才能使设置有效地工作。为了增加DRL在真实机器人上的使用,减少模拟和真实世界机器人之间的差距,我们提出了一个开源工具包:robo-gym。我们展示了用于模拟和真实环境的统一设置,使训练在模拟中的应用到机器人上的无缝转移成为可能。我们展示了该框架的能力和有效性,以及两个具有工业机器人特征的真实世界应用:移动机器人和机械臂。该框架的分布式能力带来了许多优势,例如使用分布式算法,将仿真和训练的工作负载分离到不同的物理机器上,以及未来在仿真和现实世界中同时进行训练的机会。最后,我们提供了与其他常用最先进的DRL框架的概述和比较。
三步曲:
- 学术论文
- 技术手册
- 源码仓库
1学术论文
2技术手册
3源码仓库

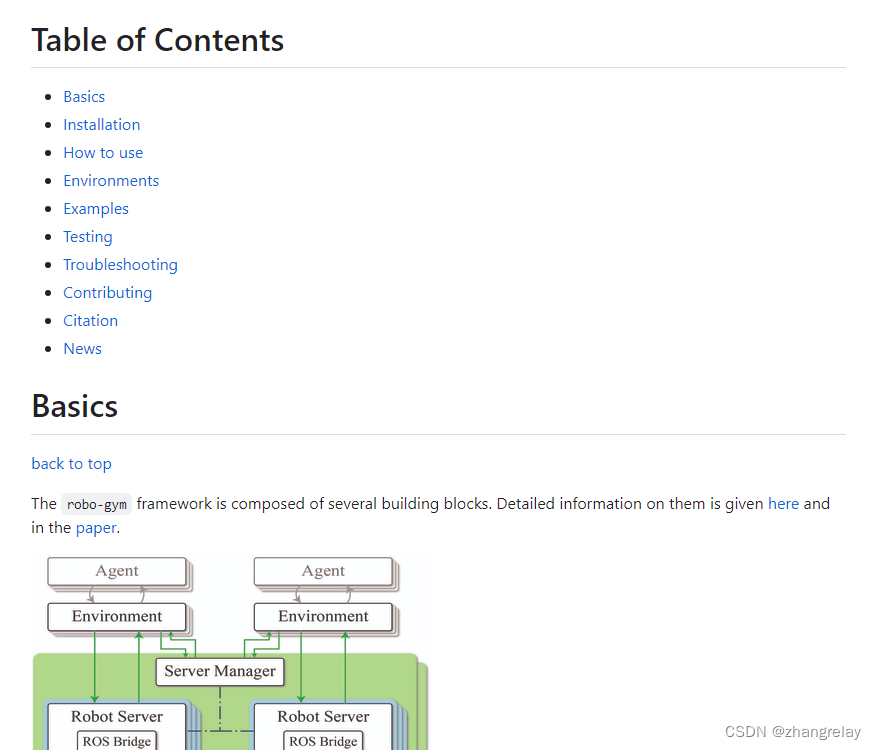
Robo-Gym 是一个开源工具包,用于在真实和模拟机器人上进行分布式深度强化学习。如果您想学习 Robo-Gym,以下是一些建议:
- 阅读官方文档:Robo-Gym 的官方文档提供了有关该工具包的详细信息,包括安装说明、API 参考和示例代码。确保您已经阅读了官方文档,以便了解如何正确使用 Robo-Gym。
- 了解强化学习基础知识:Robo-Gym 是一个强化学习框架,因此您需要了解强化学习的基础知识。您可以从网上找到一些免费的强化学习教程,例如麻省理工学院的 "Introduction to Reinforcement Learning" 课程。
- 学习深度学习基础知识:Robo-Gym 使用深度神经网络作为 Q 函数和策略函数。因此,您需要了解深度学习的基本概念和术语,例如卷积神经网络、循环神经网络和深度强化学习算法。
- 参考示例代码:Robo-Gym 提供了许多示例代码,这些代码演示了如何使用该工具包进行深度强化学习。您可以参考这些示例代码,了解如何使用 Robo-Gym 实现各种强化学习算法。
- 参与社区讨论:Robo-Gym 有一个活跃的社区,您可以在社区中提问、回答问题和分享经验。通过参与社区讨论,您可以获得其他用户的帮助,并了解该工具包的最新进展。
- 实践:最后,要真正掌握 Robo-Gym,您需要实践。尝试使用 Robo-Gym 解决一些强化学习问题,例如迷宫问题和机器人控制问题。通过实践,您可以深入了解该工具包的功能和限制,并不断提高自己的技能水平。
一、Robo-Gym技术介绍
提示:可简要介绍你所学习的it技术,以及你是如何接触、学习该技术的
Robo-Gym是一个开源工具包,用于在真实和模拟机器人上进行分布式强化学习。它提供了一系列强化学习环境,其中包括适用于仿真和现实世界机器人技术的机器人任务。此外,它还提供了有助于创建具有不同机器人和传感器的新的环境工具。
Robo-Gym的主要特点包括:
- 可以在真实和模拟机器人上无缝转换,实现了从模拟培训到真实机器人应用程序的无缝转换。
- 内置的分布式功能,可以使用分布式算法和分布式硬件。
- 基于开源软件,可以在自己的硬件上开发应用程序,而不会产生云服务费用或软件许可费用。
- 集成了两种商用工业机器人:MiR 100和UR 10(未来还会推出)。
- 成功部署为训练DRL算法,以解决仿真中的两个不同任务,从而能够解决真实机器人上的任务,而无需在现实世界中进行任何进一步的培训。
- 在Mac OS Mojave、Catalina和Ubuntu 16.04 LTS上进行了测试,可能适合于最新的Mac和Linux操作系统。需要Python 3.7.4或更高版本。
总之,Robo-Gym是一个强大的工具包,可用于机器人学习和训练,可以帮助机器人快速适应新环境和学习新技能。
二、学习前的准备工作
提示:可简要介绍你学习该技术的前期准备工作,如学习目标和计划、学习工具、资料、实践操作等
学习Robo-Gym需要以下准备工作:
- 安装必要的软件:您需要安装Python 3.7.4或更高版本,并使用虚拟环境或conda环境来管理Robo-Gym和相关的依赖项。Robo-Gym已经在Mac OS Mojave、Catalina和Ubuntu 16.04 LTS上进行了测试,因此您可以选择适合您操作系统的版本进行安装。
- 了解强化学习基础知识:Robo-Gym是一个强化学习框架,因此您需要了解强化学习的基础知识,例如状态、动作、奖励和Q函数等概念。您可以从网上找到一些免费的强化学习教程,例如麻省理工学院的"Introduction to Reinforcement Learning"课程。
- 了解深度学习基础知识:Robo-Gym使用深度神经网络作为Q函数和策略函数,因此您需要了解深度学习的基本概念和术语,例如卷积神经网络、循环神经网络和深度强化学习算法等。
- 了解机器人基础知识:您需要了解一些机器人基础知识,例如机器人运动学和动力学,以便理解Robo-Gym中的机器人模拟和训练。
- 了解分布式计算和并行计算:Robo-Gym支持分布式训练和并行计算,因此您需要了解分布式计算和并行计算的基本概念,例如MPI和多进程等。
- 参与社区讨论:Robo-Gym有一个活跃的社区,您可以在社区中提问、回答问题和分享经验。通过参与社区讨论,您可以获得其他用户的帮助,并了解该工具包的最新进展。
总之,学习Robo-Gym需要一定的准备和基础,但是一旦掌握了该工具包,您将能够使用它来进行机器人强化学习,帮助机器人快速适应新环境和学习新技能。
三、学习时的具体操作
提示:可介绍你是如何建立基础知识、实际操作、进行整理和总结的
Robo-Gym学习时的具体操作包括以下步骤:
- 安装必要的软件,包括Python和Robo-Gym。
- 了解强化学习基础知识,可以从网上找到一些免费的强化学习教程进行学习。
- 了解深度学习基础知识,需要了解深度神经网络和深度强化学习算法等知识。
- 了解机器人基础知识,需要了解机器人运动学和动力学等知识。
- 了解分布式计算和并行计算,需要了解MPI和多进程等知识。
- 创建一个虚拟环境或conda环境来管理Robo-Gym和相关的依赖项。
- 安装Robo-Gym和其他必要的依赖项。
- 导入必要的库和环境,例如mujoco_py、jsonnet和robogym等。
- 运行官方例子或其他示例代码,例如运行"examine.py"脚本进行环境分析和参数传递错误检查。
- 进行机器人强化学习训练,使用Robo-Gym提供的强化学习环境和工具进行机器人控制和训练。
- 参与社区讨论,Robo-Gym有一个活跃的社区,可以在社区中提问、回答问题和分享经验。
总之,Robo-Gym学习时的具体操作需要一定的准备和基础,但是一旦掌握了该工具包,您将能够使用它来进行机器人强化学习,帮助机器人快速适应新环境和学习新技能。
四、如何巩固学习
提示:可阐述你是如何形成更系统和清晰的知识体系并进行回顾的
Robo-Gym可以通过以下几种方式来巩固学习:
- 实时数据反馈:Robo-Gym可以实时显示训练数据,并保存到云端。通过采集数据并分析,可以大大提高筛选的精度,更加准确地查看每一部分练习实际所使的力和所做的动作。由此可以根据自身要求对训练进行个性化调整。
- 模拟和真实机器人的互换性:Robo-Gym提供了模拟和真实机器人的互换性,可以在模拟环境中进行培训,然后直接在真实机器人上应用。这样可以降低在实际环境中进行错误操作的风险,同时也可以节省成本。
- 分布式功能:Robo-Gym支持分布式算法和分布式硬件,可以利用多台计算机或多个处理器进行训练,加快学习速度。
- 多种训练方式:Robo-Gym可以支持多种不同的训练方式,例如腿部推举、伸膝和俯身划船等。这些不同的训练方式可以帮助机器人更好地理解任务,巩固学习成果。
- 集成了多种机器人:Robo-Gym集成了MiR 100和UR 10等商用工业机器人,未来还计划推出更多机器人。这些机器人可以帮助Robo-Gym更好地理解不同场景下的机器人行为和任务,巩固学习成果。
综上所述,Robo-Gym通过实时数据反馈、模拟和真实机器人的互换性、分布式功能、多种训练方式和集成多种机器人等方式来巩固学习成果,提高机器人的智能化水平。


提醒:以上内容仅做参考,可自行发散。在发布作品前,请把不需要的内容删掉。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结