您现在的位置是:首页 >其他 >伺服系统使用S曲线网站首页其他
伺服系统使用S曲线
简介伺服系统使用S曲线
在之前文章《S形曲线规划方式汇总》 介绍过贝塞尔曲线方式,并且在Marlin开源工程中也有贝塞尔曲线步进系统的实现方式。本篇介绍伺服系统中基于时间分割法实现的贝塞尔S曲线。
1 贝塞尔曲线路程规划
上文中推导过贝塞尔曲线,本文直接用结论:
对于初速度为V0,末速度为Ve,总加速时间为T的加速过程,其在x*T(0<=x<=1)时刻的6点式贝塞尔曲线速度可以表示为:
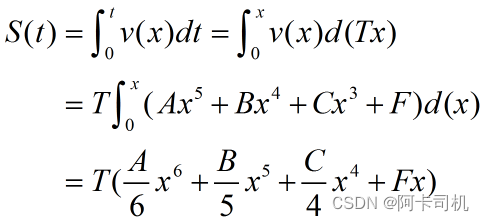
v(t)=A*x^5 + B*x^4 + C*x^3 + F
其中:A=6*(Ve-V0) B=15*(V0-Ve) C=10*(Ve-V0) F=V0
则从0试刻走到x*T时刻的总路程S为:
2 Python算法仿真
import matplotlib.pyplot as plt
import math
a = 200000 #加速度
d = 200000 #减速度
#T型速度规划函数
def move_line(len,speed):
max_speed = speed
acc_steps = max_speed*max_speed/(2*a)
dec_steps = max_speed*max_speed/(2*d)
p = len-acc_steps-dec_steps
if p<0:
acc_steps = len*d/(d+a)
p = 0
max_speed = math.sqrt(2*a*acc_steps)
acc_time = float(max_speed)/a
dec_time = float(max_speed)/d
cru_time = float(p)/max_speed
acc_until = acc_steps
acc_after = acc_steps + p
return acc_time,dec_time,cru_time,acc_until,acc_after,max_speed
acc_time,dec_time,cru_time,acc_until,acc_after,vm = move_line(8000,20000)
t = 0
Ta = acc_time
Tb = acc_time+cru_time
Tc = acc_time+dec_time+cru_time
#T型速度规划
timeArr = []
posArr = []
speedArr=[]
posPre = 0
while t<Tc:
t = t+0.001
if t<Ta:
pos = 0.5*a*t*t
elif t < Tb:
pos = acc_until+vm*(t-Ta)
else:
pos = acc_after+vm*(t-Tb)-0.5*d*(t-Tb)*(t-Tb)
speed = (pos-posPre)*1000
posPre = pos
timeArr.append(t)
posArr.append(pos)
speedArr.append(speed)
#Bezier曲线规划
#加速阶段贝塞尔曲线参数
v0 = 0
ve = vm
A1 = 6*(ve-v0)/6
B1 = 15*(v0-ve)/5
C1 = 10*(ve-v0)/4
F1 = v0
#减速阶段贝塞尔曲线参数
v0 = vm
ve = 0
A2 = 6*(ve-v0)/6
B2 = 15*(v0-ve)/5
C2 = 10*(ve-v0)/4
F2 = v0
t = 0
posPre = 0
timeArr2 = []
posArr2 = []
speedArr2 = []
while t<Tc:
t = t+0.001
if t<Ta:#加速阶段
x = t/Ta
pos = Ta*(A1*math.pow(x,6)+B1*math.pow(x,5)+C1*math.pow(x,4)+F1*x)
elif t<Tb:#匀速阶段
pos = acc_until+vm*(t-Ta)
else:#减速阶段
x = (t-Tb)/(Tc-Tb)
pos = acc_after+(Tc-Tb)*(A2*math.pow(x,6)+B2*math.pow(x,5)+C2*math.pow(x,4)+F2*x)
speed = (pos-posPre)*1000
posPre = pos
timeArr2.append(t)
posArr2.append(pos)
speedArr2.append(speed)
fig1 = plt.figure()
fig1.suptitle('Bezier-pos')
plt.plot(timeArr,posArr)
plt.plot(timeArr2,posArr2,'r')
fig4 = plt.figure()
fig4.suptitle('Bezier-speed')
plt.plot(timeArr,speedArr)
plt.plot(timeArr2,speedArr2,'r')
plt.show()运行结果:
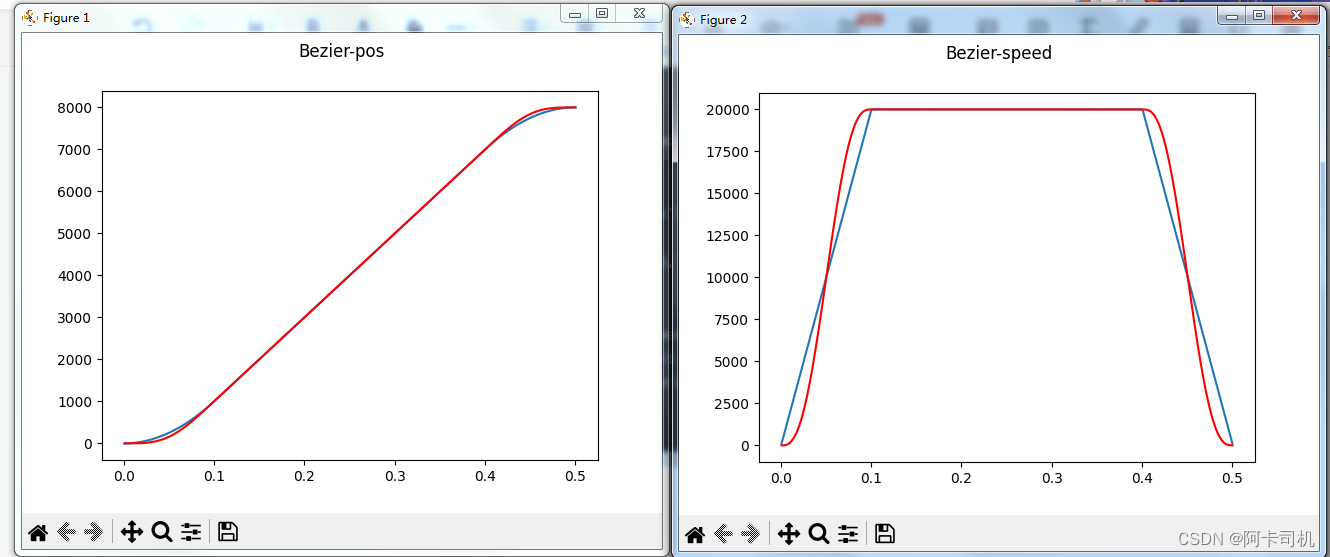
可以看到在加减速阶段Bezier规划的速度曲线相比T型曲线更柔和。
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结