您现在的位置是:首页 >学无止境 >PVT(Pyramid Vision Transformer)学习记录网站首页学无止境
PVT(Pyramid Vision Transformer)学习记录
引言与启发
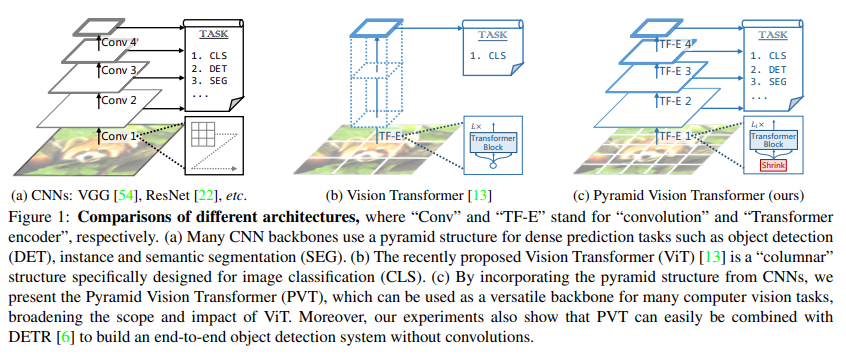
自从ViT之后,关于vision transformer的研究呈井喷式爆发,从思路上分主要沿着两大个方向,一是提升ViT在图像分类的效果;二就是将ViT应用在其它图像任务中,比如分割和检测任务上,这里介绍的PVT(Pyramid Vision Transformer) 就属于后者。PVT相比ViT引入了和CNN类似的金字塔结构,使得PVT像CNN那样作为backbone应用在dense prediction任务(分割和检测等)。
设计思路
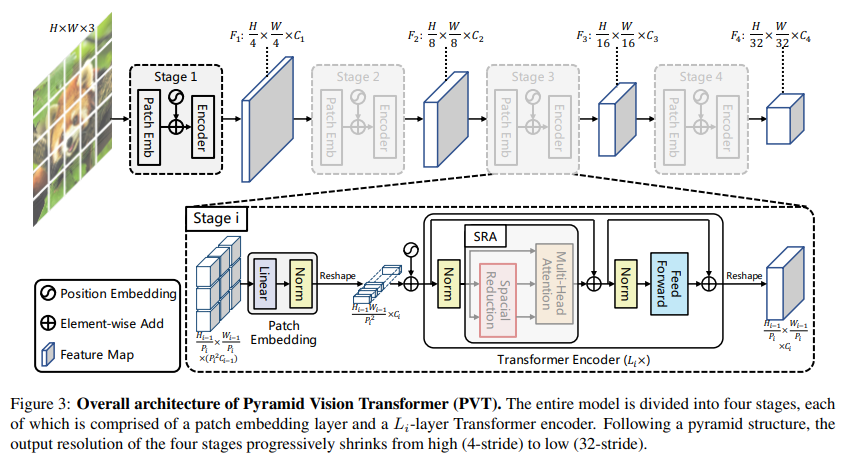
PVT的设计思路是目前在CNN中特征要想获取多尺度特征可以通过FPN(特征金字塔网络),那么Transformer是否也可以这样做呢,由此提出了PVT(Pyramid Vision Transformer)这个模块可以很轻松的与DETR类模型相结合从而实现端到端检测。
其实PVT的思想很简单,就是将Transformer与FPN相结合,通过卷积来将特征图变小,进而减少计算。
结合上图,我们可以看到其主要创新点为:
- 相较于ViT,其使用了细粒度的图像patch,可以学习高分辨率的特征表示
- 借鉴于CNN,设计了金字塔结构,可以进行多尺度特征的学习
- 引入了SRA模块,主要用于改进多头注意力模块来减少QKV的计算量
模型流程
模型的初始化参数,在后面会对其进行讲解
def pvt_small():
model = PyramidVisionTransformer(
patch_size=4, embed_dims=[64, 128, 320, 512], num_heads=[1, 2, 5, 8], mlp_ratios=[8, 8, 4, 4], qkv_bias=True,
norm_layer=partial(nn.LayerNorm, eps=1e-6), depths=[3, 4, 6, 3], sr_ratios=[8, 4, 2, 1])
首先我们的输入图片为torch.Size([2, 3, 224, 224]),即batch-size=2,channel=3,W=H=224
随后送入stage1:
x, (H, W) = self.patch_embed1(x)
pos_embed1 = self._get_pos_embed(self.pos_embed1, self.patch_embed1, H, W)
x = x + pos_embed1
x = self.pos_drop1(x)
for blk in self.block1:
x = blk(x, H, W)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
Patch操作
首先对输入图片进行patch操作,其完成对图片的切分以及线性映射(维度转换)
stage1时的patchEmbed定义为:
PatchEmbed(
(proj): Conv2d(3, 64, kernel_size=(4, 4), stride=(4, 4))
(norm): LayerNorm((64,), eps=1e-05, elementwise_affine=True)
)
def forward(self, x):
B, C, H, W = x.shape
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
H, W = H // self.patch_size[0], W // self.patch_size[1]
return x, (H, W)
可以看到,送入patch_embed模块的向量首先获取其各个参数(B,C,W,H)
随后调用self.proj操作
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
其为一个二维卷积:Conv2d(3, 64, kernel_size=(4, 4), stride=(4, 4))
卷积层输出尺寸: o = ⌊(i + 2p - k) / s⌋ + 1
padding默认为0,则输出大小为【2,64,56,56】
随后经过flatten展平操作得到【2,64,56X56】
随后transpose进行维度转换为:【2,56X56,64】即torch.Size([2, 3136, 64])
随后便是归一化操作以及对W,H大小改变并返还,此时W=H=56
位置编码
位置编码方面其使用的是可学习位置编码方式。
pos_embed是由下列方式初始化得到的,此时大小为:torch.Size([1, 3136, 64])
self.pos_embed1 = nn.Parameter(torch.zeros(1, self.patch_embed1.num_patches, embed_dims[0]))
随后进行处理:
pos_embed1 = self._get_pos_embed(self.pos_embed1, self.patch_embed1, H, W)
处理过程为:
def _get_pos_embed(self, pos_embed, patch_embed, H, W):
if H * W == self.patch_embed1.num_patches:
return pos_embed
else:
return F.interpolate(
pos_embed.reshape(1, patch_embed.H, patch_embed.W, -1).permute(0, 3, 1, 2),
size=(H, W), mode="bilinear").reshape(1, -1, H * W).permute(0, 2, 1)
紧接着将处理的语义特征信息与位置编码信息直接相加,注意:
此时的pos_embed1为:torch.Size([1, 3136, 64]) x 为 torch.Size([2, 3136, 64]),也是可以相加的
x = x + pos_embed1
如下测试,利用广播机制扩充维度进行计算
import torch
data = torch.randn((2, 1, 2, 2))
data1 = torch.randn((1, 1, 2, 2))
print(data)
print(data1)
print(data+data1)
注意力计算
进入注意力计算模块,每个stage中的注意力层有多个
for blk in self.block1:
x = blk(x, H, W)
随后开始注意力的计算:
Q构造:经过一个linear进行构造,并进行分头计算(多头注意力)
self.q = nn.Linear(dim, dim, bias=qkv_bias)
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
得到q为:torch.Size([2, 1, 3136, 64])
随后进入到其创新的模块了,其是对K,V进行下采样,减小其数量:self.sr_ratio是缩小规模
x为torch.Size([2, 3136, 64]),首先经过permute进行维度变换为torch.Size([2, 64,3136]),随后经过reshape为:torch.Size([2, 64, 56, 56])
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
然后通过卷积操作进行降维:
self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
self.sr为:Conv2d(64, 64, kernel_size=(8, 8), stride=(8, 8))
通过 卷积层输出尺寸: o = ⌊(i + 2p - k) / s⌋ + 1
可得输出尺寸为:7即49 对应的tensor为:torch.Size([2, 49, 64])
然后便是使用x_来获取kv
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
得到kv为torch.Size([2, 2, 1, 49, 64]),k,v皆为torch.Size([2, 1, 49, 64]),但数值上不同
完整代码如下:
if self.sr_ratio > 1:
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
然后便是进行一系列计算了:
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
@实际为x@y=x.matmul(y)
最终计算得到注意力机制的结果x结果仍为torch.Size([2, 3136, 64])
注意力机制模块完整代码如下:
def forward(self, x, H, W):
B, N, C = x.shape
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
最终得到x经过reshape恢复为2维结果,再次进入下一个stage进行计算
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
随后经过卷积缩小特征图大小,在空间上的损失由维度进行补偿,下一个阶段x为:
torch.Size([2, 784, 128])
通过依次该过程,便将其大小进行缩减,通过也将其获取了多尺度信息。值得注意的是,只有stage1上patch=4,在后面的三个stage上patch都为2,这样也就参考卷积,其是一个二倍大小的关系。
总体来看,Pyramid Version Transformer的设计还是较为容易理解的,下面博主从代码入手,来详细讲解PVT的构建过程。
完整代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
from functools import partial
from timm.models.layers import DropPath, to_2tuple, trunc_normal_
from timm.models.registry import register_model
from timm.models.vision_transformer import _cfg
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., sr_ratio=1):
super().__init__()
assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, dim, bias=qkv_bias)
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.sr_ratio = sr_ratio
if sr_ratio > 1:
self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)
self.norm = nn.LayerNorm(dim)
def forward(self, x, H, W):
B, N, C = x.shape
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block(nn.Module):
def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., act_layer=nn.GELU, norm_layer=nn.LayerNorm, sr_ratio=1):
super().__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(
dim,
num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop=attn_drop, proj_drop=drop, sr_ratio=sr_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def forward(self, x, H, W):
x = x + self.drop_path(self.attn(self.norm1(x), H, W))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class PatchEmbed(nn.Module):
""" Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dim=768):
super().__init__()
img_size = to_2tuple(img_size)
patch_size = to_2tuple(patch_size)
self.img_size = img_size
self.patch_size = patch_size
assert img_size[0] % patch_size[0] == 0 and img_size[1] % patch_size[1] == 0,
f"img_size {img_size} should be divided by patch_size {patch_size}."
self.H, self.W = img_size[0] // patch_size[0], img_size[1] // patch_size[1]
self.num_patches = self.H * self.W
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = nn.LayerNorm(embed_dim)
def forward(self, x):
B, C, H, W = x.shape
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
H, W = H // self.patch_size[0], W // self.patch_size[1]
return x, (H, W)
class PyramidVisionTransformer(nn.Module):
def __init__(self, img_size=224, patch_size=16, in_chans=3, num_classes=1000, embed_dims=[64, 128, 256, 512],
num_heads=[1, 2, 4, 8], mlp_ratios=[4, 4, 4, 4], qkv_bias=False, qk_scale=None, drop_rate=0.,
attn_drop_rate=0., drop_path_rate=0., norm_layer=nn.LayerNorm,
depths=[3, 4, 6, 3], sr_ratios=[8, 4, 2, 1], F4=False):
super().__init__()
self.num_classes = num_classes
self.depths = depths
self.F4 = F4
# patch_embed
self.patch_embed1 = PatchEmbed(img_size=img_size, patch_size=patch_size, in_chans=in_chans,
embed_dim=embed_dims[0])
self.patch_embed2 = PatchEmbed(img_size=img_size // 4, patch_size=2, in_chans=embed_dims[0],
embed_dim=embed_dims[1])
self.patch_embed3 = PatchEmbed(img_size=img_size // 8, patch_size=2, in_chans=embed_dims[1],
embed_dim=embed_dims[2])
self.patch_embed4 = PatchEmbed(img_size=img_size // 16, patch_size=2, in_chans=embed_dims[2],
embed_dim=embed_dims[3])
# pos_embed
self.pos_embed1 = nn.Parameter(torch.zeros(1, self.patch_embed1.num_patches, embed_dims[0]))
self.pos_drop1 = nn.Dropout(p=drop_rate)
self.pos_embed2 = nn.Parameter(torch.zeros(1, self.patch_embed2.num_patches, embed_dims[1]))
self.pos_drop2 = nn.Dropout(p=drop_rate)
self.pos_embed3 = nn.Parameter(torch.zeros(1, self.patch_embed3.num_patches, embed_dims[2]))
self.pos_drop3 = nn.Dropout(p=drop_rate)
self.pos_embed4 = nn.Parameter(torch.zeros(1, self.patch_embed4.num_patches + 1, embed_dims[3]))
self.pos_drop4 = nn.Dropout(p=drop_rate)
# transformer encoder
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
cur = 0
self.block1 = nn.ModuleList([Block(
dim=embed_dims[0], num_heads=num_heads[0], mlp_ratio=mlp_ratios[0], qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[cur + i], norm_layer=norm_layer,
sr_ratio=sr_ratios[0])
for i in range(depths[0])])
cur += depths[0]
self.block2 = nn.ModuleList([Block(
dim=embed_dims[1], num_heads=num_heads[1], mlp_ratio=mlp_ratios[1], qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[cur + i], norm_layer=norm_layer,
sr_ratio=sr_ratios[1])
for i in range(depths[1])])
cur += depths[1]
self.block3 = nn.ModuleList([Block(
dim=embed_dims[2], num_heads=num_heads[2], mlp_ratio=mlp_ratios[2], qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[cur + i], norm_layer=norm_layer,
sr_ratio=sr_ratios[2])
for i in range(depths[2])])
cur += depths[2]
self.block4 = nn.ModuleList([Block(
dim=embed_dims[3], num_heads=num_heads[3], mlp_ratio=mlp_ratios[3], qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate, drop_path=dpr[cur + i], norm_layer=norm_layer,
sr_ratio=sr_ratios[3])
for i in range(depths[3])])
# init weights
trunc_normal_(self.pos_embed1, std=.02)
trunc_normal_(self.pos_embed2, std=.02)
trunc_normal_(self.pos_embed3, std=.02)
trunc_normal_(self.pos_embed4, std=.02)
self.apply(self._init_weights)
def init_weights(self, pretrained=True):
import torch
# if isinstance(pretrained, str):
# logger = get_root_logger()
# load_checkpoint(self, pretrained, map_location='cpu', strict=False, logger=logger)
def reset_drop_path(self, drop_path_rate):
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(self.depths))]
cur = 0
for i in range(self.depths[0]):
self.block1[i].drop_path.drop_prob = dpr[cur + i]
cur += self.depths[0]
for i in range(self.depths[1]):
self.block2[i].drop_path.drop_prob = dpr[cur + i]
cur += self.depths[1]
for i in range(self.depths[2]):
self.block3[i].drop_path.drop_prob = dpr[cur + i]
cur += self.depths[2]
for i in range(self.depths[3]):
self.block4[i].drop_path.drop_prob = dpr[cur + i]
def _init_weights(self, m):
if isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Linear) and m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LayerNorm):
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1.0)
def _get_pos_embed(self, pos_embed, patch_embed, H, W):
if H * W == self.patch_embed1.num_patches:
return pos_embed
else:
return F.interpolate(
pos_embed.reshape(1, patch_embed.H, patch_embed.W, -1).permute(0, 3, 1, 2),
size=(H, W), mode="bilinear").reshape(1, -1, H * W).permute(0, 2, 1)
def forward_features(self, x):
outs = []
B = x.shape[0]
# stage 1
x, (H, W) = self.patch_embed1(x)
pos_embed1 = self._get_pos_embed(self.pos_embed1, self.patch_embed1, H, W)
x = x + pos_embed1
x = self.pos_drop1(x)
for blk in self.block1:
x = blk(x, H, W)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
# stage 2
x, (H, W) = self.patch_embed2(x)
pos_embed2 = self._get_pos_embed(self.pos_embed2, self.patch_embed2, H, W)
x = x + pos_embed2
x = self.pos_drop2(x)
for blk in self.block2:
x = blk(x, H, W)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
# stage 3
x, (H, W) = self.patch_embed3(x)
pos_embed3 = self._get_pos_embed(self.pos_embed3, self.patch_embed3, H, W)
x = x + pos_embed3
x = self.pos_drop3(x)
for blk in self.block3:
x = blk(x, H, W)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
# stage 4
x, (H, W) = self.patch_embed4(x)
pos_embed4 = self._get_pos_embed(self.pos_embed4[:, 1:], self.patch_embed4, H, W)
x = x + pos_embed4
x = self.pos_drop4(x)
for blk in self.block4:
x = blk(x, H, W)
x = x.reshape(B, H, W, -1).permute(0, 3, 1, 2).contiguous()
outs.append(x)
return outs
def forward(self, x):
x = self.forward_features(x)
if self.F4:
x = x[3:4]
return x
def _conv_filter(state_dict, patch_size=16):
""" convert patch embedding weight from manual patchify + linear proj to conv"""
out_dict = {}
for k, v in state_dict.items():
if 'patch_embed.proj.weight' in k:
v = v.reshape((v.shape[0], 3, patch_size, patch_size))
out_dict[k] = v
return out_dict
def pvt_small():
model = PyramidVisionTransformer(
patch_size=4, embed_dims=[64, 128, 320, 512], num_heads=[1, 2, 5, 8], mlp_ratios=[8, 8, 4, 4], qkv_bias=True,
norm_layer=partial(nn.LayerNorm, eps=1e-6), depths=[3, 4, 6, 3], sr_ratios=[8, 4, 2, 1])
return model
model = pvt_small()
data = torch.randn((2, 3, 224, 224))
feature = model(data)
print(model)
for out in feature:
print(out.shape)






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结