您现在的位置是:首页 >学无止境 >毫米波雷达系列 | 传统CFAR检测(有序统计类)网站首页学无止境
毫米波雷达系列 | 传统CFAR检测(有序统计类)
毫米波雷达系列 | 传统CFAR检测(有序统计类)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-u9WGouJF-1684046119664)(毫米波雷达系列 传统CFAR检测(有序统计类).assets/image-20230514141039567.png)]](https://img-blog.csdnimg.cn/4b216d6bc78e4891847486d2c6108def.png)
1.OS-CFAR
有序统计类CFAR检测器(OS-CFAR)与均值类CFAR检测器处理过程不同,在对背景杂波功率进行估计时,需要将所有参考单元进行升序排列得到一个新的有序数列,在新序列中选取第k个值作为背景杂波功率值,所以带检测单元的计算表达式为:
Z
o
s
=
X
k
Zos=X_k
Zos=Xk
门限因子为k,门限值S:
S
=
k
Z
o
s
=
k
x
k
S=kZos=kx_k
S=kZos=kxk
相较于均值类CFAR检测器来说,OS-CFAR检测器多了一个参数k,k的取值范围一般在1/2~3/4之间。
2.TM-CFAR
剔除平均(trimmed-mean)检测器在OS-CFAR检测器基础上,又剔除了r1个最小单元和r2个最大单元,对剩余的参考单元取均值作为杂波背景估计:
Z
t
m
=
∑
i
=
r
1
+
1
N
−
r
2
x
i
Ztm=sum_{i=r1+1}^{N-r2}{x_i}
Ztm=i=r1+1∑N−r2xi
门限值S:
S
=
k
Z
t
m
=
k
∑
i
=
r
1
+
1
N
−
r
2
x
i
S=kZtm=ksum_{i=r1+1}^{N-r2}{x_i}
S=kZtm=ki=r1+1∑N−r2xi
3.仿真对比
在均匀杂波环境、多目标环境和杂波边缘环境中对均值类CFAR检测器的性能进行比较分析。
参数设置:
| 虚警概率 | 10-4 |
|---|---|
| 参考单元 | 32 |
| 保护单元 | 4 |
| 信噪比SNR | 20 |
| 多目标单元位置 | 110和120 |
| 比例系数 | 3/4 |
| r1、r2 | 2、4 |
| 杂波边缘功率 | 20dB、30dB |
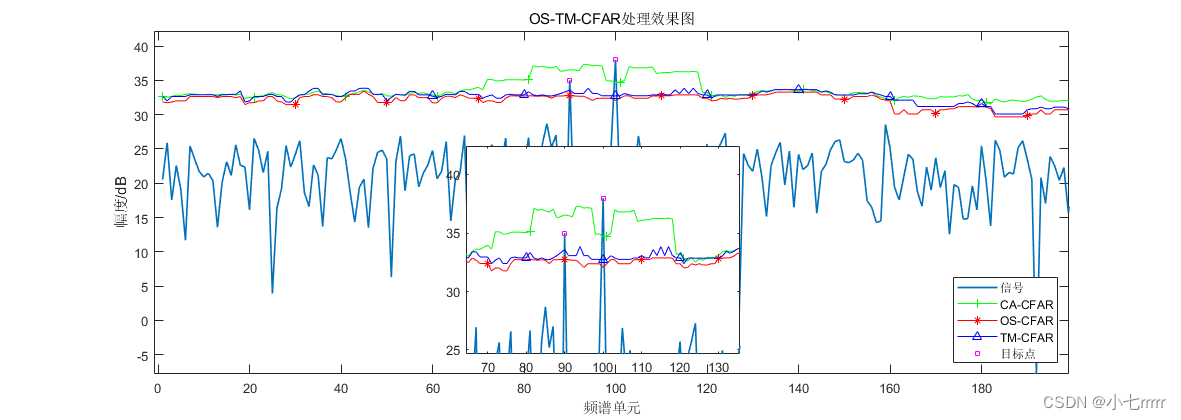
(1)均匀环境
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CWELftHz-1684046119666)(毫米波雷达系列 传统CFAR检测(有序统计类).assets/OS_TM_均匀环境单目标检测.png)]](https://img-blog.csdnimg.cn/a246f5ca51a34eeb99f5889049d0f0dd.png)
(2)多目标
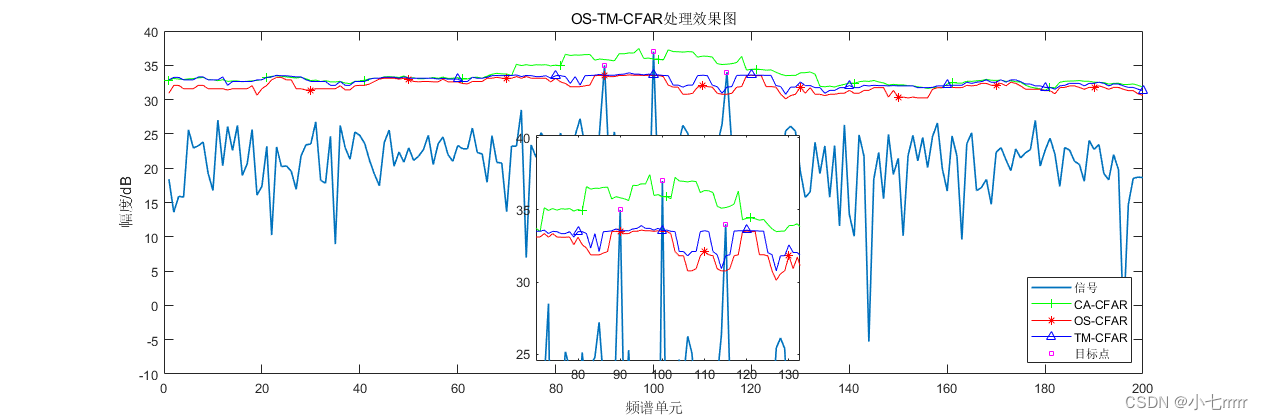
(3)杂波边缘
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uCIgTLVN-1684046119669)(毫米波雷达系列 传统CFAR检测(有序统计类).assets/PS-TM-CFAR边缘杂波环境中.png)]](https://img-blog.csdnimg.cn/b2cc6d77ba2244aab49bc609381d0949.png)
从结果图中可以看出,在均匀环境中三种检测器均在第80个距离单元处检测到目标,在均匀环境中有序统计类CFAR检测器和CA-CFAR检测器一样具有良好的检测性能;在存在两个目标的环境中,只有CA-CFAR检测器发生漏警,OS-CFAR和TM-CFAR均可以检测出全部目标,并且OS-CFAR门限值更加平缓,说明在多目标环境中有序统计类CFAR检测器依旧表现出优异的检测性能。当存在三个目标时,OS-CFAR和TM-CFAR都可以检测出所有目标,而CA-CFAR仍然存在目标遮蔽现象,可以得知有序统计类CFAR检测器在多目标环境中的优势是均值类CFAR检测器无法比拟的;统计有序类CFAR检测器在边缘杂波环境下的虚警控制能力一般,在杂波边缘高功率附近容易发生虚警现象。
(4)代码
OS-CFAR
function [ XT ] = cfar_os( xc, N, k, pro_N, PAD)
% 假设回波服从高斯分布
% alpha赋值有些问题,一个比较复杂的高次函数
%% 计算alpha
% syms alpha PFA;
% PFA(alpha)=gamma(N-1).*gamma(N-k+alpha-1)./gamma(N-k-1)./gamma(N+alpha-1);
% [alpha,~,~]=solve(PFA(alpha)==PAD,'ReturnConditions', true) ;
alpha=N.*(PAD.^(-1./N)-1);
persistent left; %类似于Java中静态变量
persistent right;
persistent HalfSlide;
persistent HalfProt;
persistent len;
persistent Ksite;
if isempty(left)
HalfSlide=N/2;
HalfProt=pro_N/2;
left=1+HalfProt+HalfSlide; % 左边界
right=length(xc)-HalfProt-HalfSlide; % 右边界
len=length(xc);
Ksite=round(N*k);
end
XT=zeros(1,len); %检测阈值
for i=1:left-1 %左边界
cell_right=xc(1,i+HalfProt+1:i+HalfSlide*2+HalfProt);
cell_right=sort(cell_right);
XT(1,i)=cell_right(Ksite)*alpha;
end
for i=left:right %中间区域
cell_left=xc(1,i-HalfSlide-HalfProt:i-HalfProt-1);
cell_right=xc(1,i+HalfProt+1:i+HalfSlide+HalfProt);
cell=sort([cell_left,cell_right]);
XT(1,i)=cell(Ksite)*alpha;
end
for i=right+1:len %右边界
cell_left=xc(1,i-HalfSlide*2-HalfProt:i);
cell_left=sort(cell_left);
XT(1,i)=cell_left(Ksite)*alpha;
end
end
TM-CFAR
function [ XT ] = cfar_tm( xc, N, k, pro_N, PAD,r1,r2)
% 假设回波服从高斯分布
% alpha赋值有些问题,一个比较复杂的高次函数
alpha=N.*(PAD.^(-1./N)-1);
persistent left; %类似于Java中静态变量
persistent right;
persistent HalfSlide;
persistent HalfProt;
persistent len;
persistent Ksite;
if isempty(left)
HalfSlide=N/2;
HalfProt=pro_N/2;
left=1+HalfProt+HalfSlide; % 左边界
right=length(xc)-HalfProt-HalfSlide; % 右边界
len=length(xc);
Ksite=round(N*k);
end
XT=zeros(1,len); %检测阈值
for i=1:left-1 %左边界
cell_right=xc(1,i+HalfProt+1:i+HalfSlide*2+HalfProt);
cell_right=sort(cell_right);
cell_r=cell_right(1+r1:end-r2);
XT(1,i)=cell_r(Ksite)*alpha;
end
for i=left:right %中间区域
cell_left=xc(1,i-HalfSlide-HalfProt:i-HalfProt-1);
cell_right=xc(1,i+HalfProt+1:i+HalfSlide+HalfProt);
cell=sort([cell_left,cell_right]);
cell_r=cell(1+r1:end-r2);
XT(1,i)=cell_r(Ksite)*alpha;
end
for i=right+1:len %右边界
cell_left=xc(1,i-HalfSlide*2-HalfProt:i);
cell_left=sort(cell_left);
cell_r=cell_left(1+r1:end-r2);
XT(1,i)=cell_r(Ksite)*alpha;
end
end






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结