您现在的位置是:首页 >其他 >PWM输出实验网站首页其他
PWM输出实验
实验内容
使用TIM3来产生PWM输出
使用TIM3的通道2,把通道2重映射到PB5.产生PWM来控制DS0的亮度。
PWM简介
脉冲宽度调制(PWM),简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种有效方法。
脉冲波:
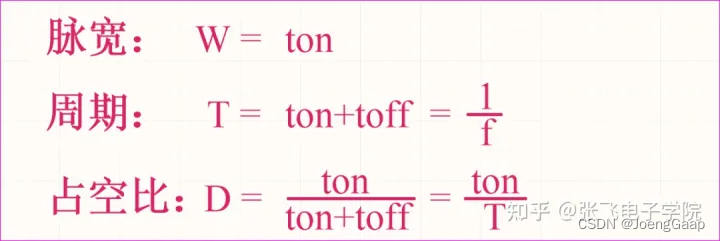
脉冲周期(T),单位是时间,比如纳秒(ns)、微妙(μs)、毫秒(ms)等;
脉冲频率(f),单位是赫兹(Hz)、千赫兹(kHz)等,与脉冲周期成倒数关系,f=1/T;
脉冲宽度(W),简称“脉宽”,是脉冲高电平持续的时间。单位是时间,比如纳秒(ns)、微妙(μs)、毫秒(ms)等;
占空比(D),脉宽除以脉冲周期的值,百分数表示,比如50%。也常有小数或分数表示的,比如0.5或1/2。

STM32 的定时器除了 TIM6 和 7。其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出,这样,STM32 最多可以同时产生 30 路 PWM 输出!这里我们仅利用 TIM3的CH2 产生一路PWM 输出。
寄存器
捕捉/比较模式寄存器(TIMx_CCMR1/2)
TIMx_CCMR1控制CH1和2,TIMx_CCMR2控制CH3和4
将寄存器分为两层,上面一层对应输出而下面一层对应输入。模式设置为OCxM由3位组成,总共可以配置成7种模式,我们使用的是PWM模式,这3位必须设置为110/111。这两种PWM模式的区别就是输出电平的极性相反。

捕捉/比较使能寄存器(TIMx_CCER)
该寄存器控制各个输入输出通道的开关。该寄存器比较简单,我们这里只用到了 CC2E 位,该位是输入/捕获 2 输出使能位,要想PWM 从 IO 口输出,这个位必须设置为 1,所以我们需要设置该位为 1。

捕获/比较寄存器(TIMx_CCR1~4)
寄存器总共有4 个,对应4 个输通道CH1~4。因为这 4 个寄存器都差不多,在输出模式下,该寄存器的值与 CNT 的值比较,根据比较结果产生相应动作。利用这点,我们通过修改这个寄存器的值,就可以控制 PWM 的输出脉宽了。

重映射
我们要利用TIM3 的CH2 输出PWM 来控制DS0 的亮度,但是TIM3_CH2 默认是接在PA7上面的,而我们的 DS0 接在 PB5 上面,如果普通 MCU,可能就只能用飞线把 PA7 飞到 PB5上来实现了,不过,我们用的是 STM32,它比较高级,可以通过重映射功能,把 TIM3_CH2映射到PB5 上。
STM32 的重映射控制是由复用重映射和调试 IO 配置寄存器(AFIO_MAPR)控制的,我们这里用到的是TIM3 的重映射,TIM3_REMAP 是由[11:10]这2 个位控制的。
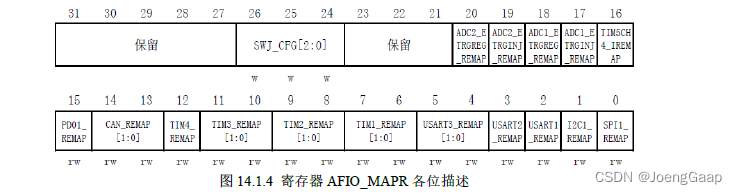
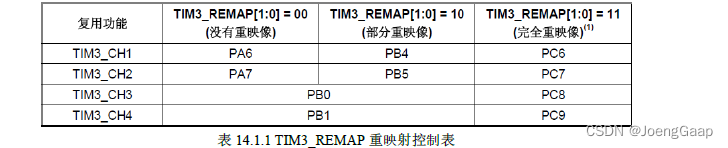
默认条件下,TIM3_REMAP[1:0]为 00,是没有重映射的,所以 TIM3_CH1~TIM3_CH4 分别是接在 PA6、PA7、PB0 和 PB1 上的,而我们想让 TIM3_CH2 映射到 PB5 上,则需要设置TIM3_REMAP[1:0]=10,即部分重映射,这里需要注意,此时TIM3_CH1 也被映射到PB4 上了。
步骤
1)开启TIM3 时钟以及复用功能时钟,配置PB5 为复用输出。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器 3 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //复用时钟使能
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
2)设置TIM3_CH2 重映射到PB5 上。
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
第一个入口参数可以理解为设置重映射的类型,比如TIM3 部分重映射入口参数为 GPIO_PartialRemap_TIM3,直接使用设置好的定义就行,部分重映射模式
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
3)初始化TIM3,设置TIM3 的ARR 和PSC。
TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx 的
4)设置TIM3_CH2 的PWM 模式,使能TIM3 的CH2 输出。
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
typedef struct
{
uint16_t TIM_OCMode; //设置模式是PWM 还是输出比较,这里我们是PWM 模式
uint16_t TIM_OutputState; //设置比较输出使能,也就是使能PWM 输出到端口
uint16_t TIM_OutputNState; //设置极性是高还是低
uint16_t TIM_Pulse; //高级定时器功能
uint16_t TIM_OCPolarity;
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //初始化TIM3 OC2
5)使能TIM3。
TIM_Cmd(TIM3, ENABLE); //使能 TIM3
6)修改TIM3_CCR2 来控制占空比。
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
main.c
#include"led.h"
#include"pwm.h"
#include"delay.h"
int main()
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
LED_Init(); //LED端口初始化
PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval); //控制占空比
}
}
pwm.h
#ifndef PWM_H_
#define PWM_H_
#include"stm32f10x_tim.h"
void PWM_Init(u16 arr,u16 psc);
#endif
pwm.c
#include"pwm.h"
void PWM_Init(u16 arr,u16 psc)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//复用时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);//TIM3部分重映射
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
//设置PWM模式
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择PWM 模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //初始化TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能预装载寄存器
TIM_Cmd(TIM3,ENABLE);//使能TIM3
}






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结