您现在的位置是:首页 >技术交流 >在Ubuntu24.04上配置ROS2网站首页技术交流
在Ubuntu24.04上配置ROS2
简介在Ubuntu24.04上配置ROS2
最近在学习ROS2,记录一下环境配置过程
用的是Ubuntu 24.04.1版本,对应的是jazzy版本
可以参考ROS2官网
利用deepseek查询得到:Ubuntu (deb packages) — ROS 2 Documentation: Jazzy documentation
1、环境配置
首先
-
ROS 2 Humble支持Ubuntu 22.04 (Jammy)。
-
确保系统已更新:
-
sudo apt update && sudo apt upgrade -y确保语言环境支持UTF-8:
-
sudo apt install locales sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8如果虚拟机可以科学上网:直接访问GitHub,需要注意的是,新版本Ubuntu不支持key配置了,需要将gdg文件放到文件夹:
/etc/apt/trusted.gpg.d/ros-archive-keyring.gpg
-
sudo apt install curl software-properties-common sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /etc/apt/trusted.gpg.d/ros-archive-keyring.gpg添加软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null -
如果不可以科学上网,改用中科大软件源,本文采取这种方式
-
sudo curl -sSL https://mirrors.ustc.edu.cn/rosdistro/ros.key -o /etc/apt/trusted.gpg.d/ros-archive-keyring.gpgsudo sh -c 'echo "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/trusted.gpg.d/ros-archive-keyring.gpg] https://mirrors.ustc.edu.cn/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2.list'2、ROS2安装
- 先更新
-
sudo apt update安装ros2,对应的版本是sudo apt install ros-jazzy-desktop
-
sudo apt install ros-jazzy-desktop记得在终端环境变量里面配置基础变量
-
sudo nano ~/.bashrc在文档的最下方添加source指令
-
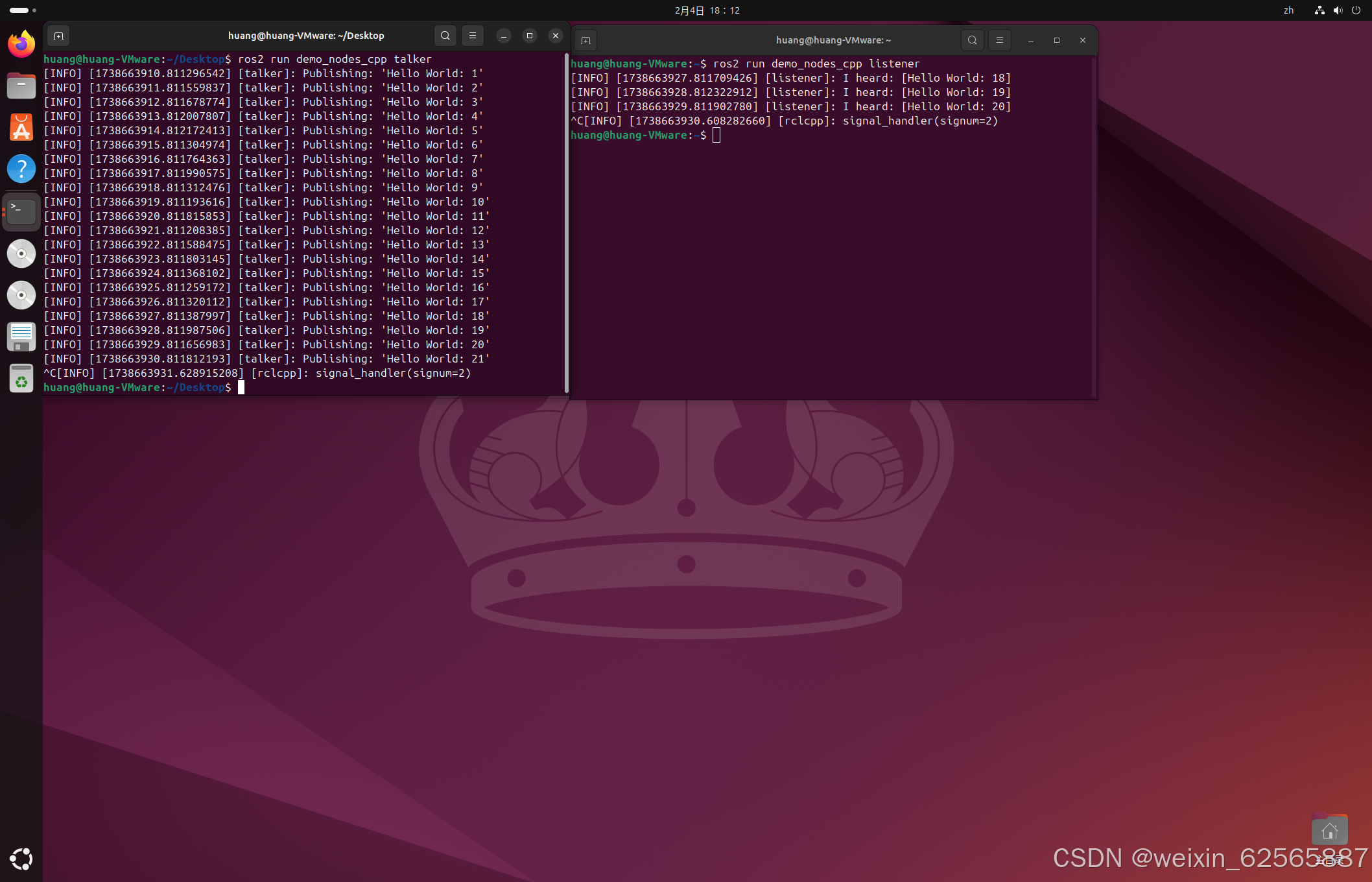
source /opt/ros/jazzy/setup.bash可以测试一下ROS2,打开一个终端
-
ros2 run demo_nodes_cpp talker开另一个终端输入
-
ros2 run demo_nodes_cpp listener出现下面画面即成功,注意要先退出listener再推出talker,CTRL+C是退出
-
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结