您现在的位置是:首页 >技术教程 >在moveit2中实现四连杆及曲柄滑块网站首页技术教程
在moveit2中实现四连杆及曲柄滑块
简介在moveit2中实现四连杆及曲柄滑块
对于一些特殊的(比如说机械构件闭环的、存在被动关节的)运动模型,该如何用urdf模型描述该模型,且在MoveIt2中进行仿真?下面提供一个思路,仅供参考。
四连杆机构
结构介绍
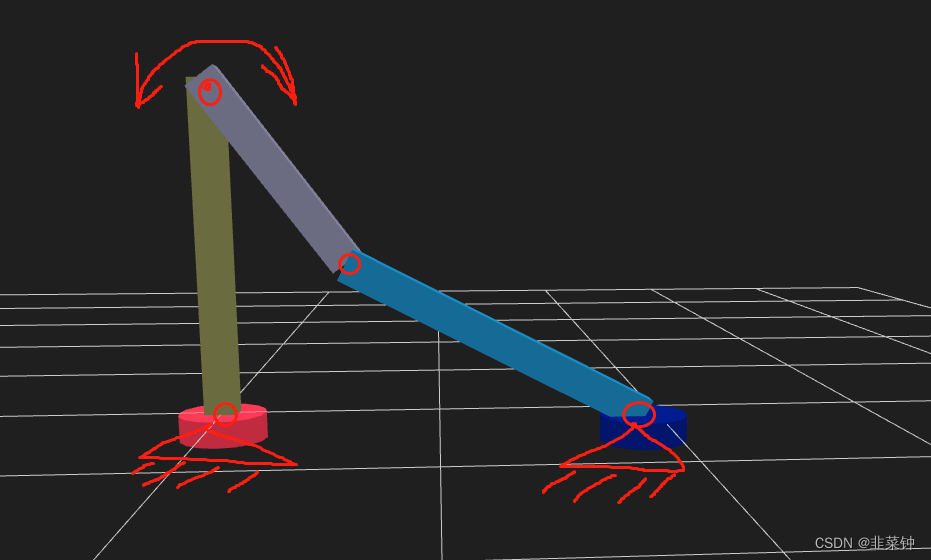
该机构的组成如下图所示。
粉红色、蓝色的底座为固定机构,黄色、灰色、青色的三根杠与彼此之间、与底座之间都是铰链连接,可以转动。其中黄色与灰色杆子连接部分的关节为主动轴,可以主动发起旋转(可以理解在此处装了马达)。
urdf文件
fourbar.urdf
<?xml version="1.0"?>
<robot name="fourbar">
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 -0.06" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.20"/>
</geometry>s
<material name="wtf0">
<color rgba="0.9 0.2 0.3 1.0" />
</material>
</visual>
<collision>
<origin xyz="0 0 -0.06" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.20"/>
</geometry>
</collision>
</link>
<link name="bar1">
<visual>
<origin xyz="0 0 0.75" rpy="0 0 0"/>
<geometry>
<box size="0.15 0.1 1.5"/>
</geometry>
<material name="wtf1">
<color rgba="0.5 0.5 0.3 1.0" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.75" rpy="0 0 0"/>
<geometry>
<box size="0.15 0.1 1.5"/>
</geometry>
</collision>
</link>
<joint name="joint1" type="continuous">
<parent link="base_link" />
<child link="bar1" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
</joint>
<link name="bar2">
<visual>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<geometry>
<box size="0.15 0.1 1.0"/>
</geometry>
<material name="wtf2">
<color rgba="0.5 0.5 0.6 1.0" />
</material>
</visual>
<collision>
<geometry>
<box size="0.15 0.1 1.0"/>
</geometry>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
</collision>
</link>
<joint name="joint2" type="continuous">
<parent link="bar1" />
<child link="bar2" />
<origin xyz="0 -0.1 1.5" rpy="0 2.5 0" />
<axis xyz="0 1 0"/>
</joint>
<link name="bar3">
<visual>
<origin xyz="0 0 0.75" rpy="0 0 0"/>
<geometry>
<box size="0.15 0.1 1.5"/>
</geometry>
<material name="wtf3">
<color rgba="0.1 0.5 0.7 1.0" />
</material>
</visual>
<collision>
<geometry>
<box size="0.15 0.1 1.5"/>
</geometry>
<origin xyz="0 0 0.75" rpy="0 0 0"/>
</collision>
</link>
<joint name="joint3" type="continuous">
<parent link="bar2" />
<child link="bar3" />
<origin xyz="0 -0.1 1.0" rpy="0 -0.45 0" />
<axis xyz="0 1 0"/>
</joint>
<link name="base_link2">
<visual>
<origin xyz="0 0 -0.06" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.20"/>
</geometry>
<material name="wtf4">
<color rgba="0. 0.1 0.5 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.12" radius="0.20"/>
</geometry>
<origin xyz="0 0 -0.06" rpy="0 0 0"/>
</collision>
</link>
<joint name="joint4" type="continuous">
<parent link="bar3" />
<child link="base_link2" />
<origin xyz="0 0 1.5" rpy="0 -2.05 0" />
<axis xyz="0 1 0"/>
</joint>
</robot>
MoveIt设置
关于如何根据urdf文件搭建MoveIt2工程,可以看看我之前写的:【在ROS2中,通过MoveIt2控制Gazebo中的自定义机械手】
步骤和之前的类似,主要注意一下这几个问题。
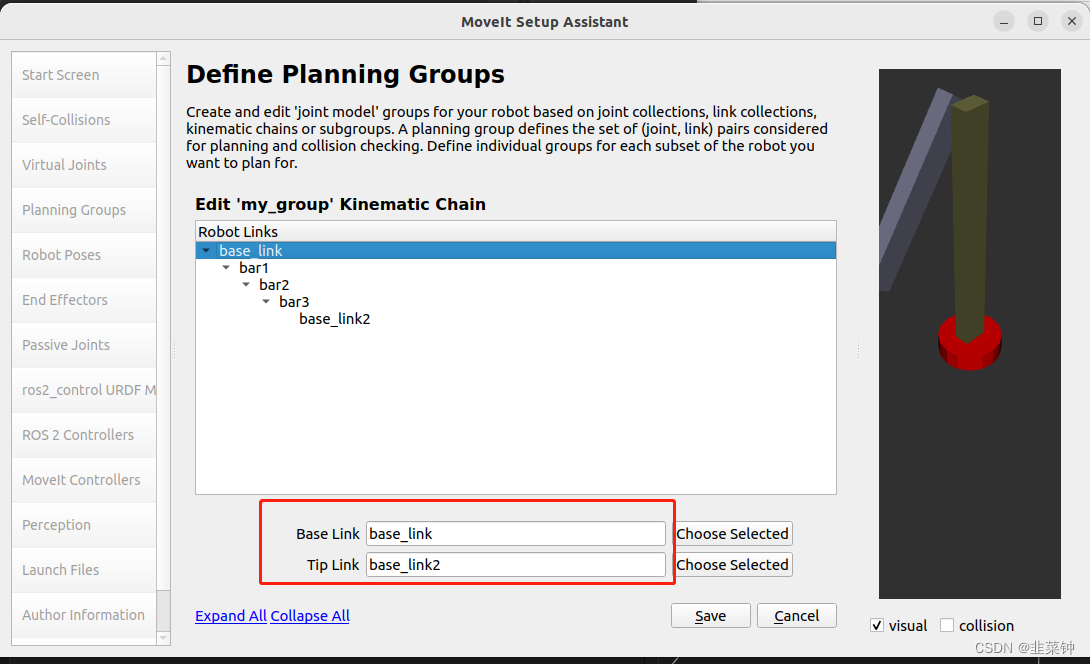
起始link和终点link分别选base_link、base_link2:
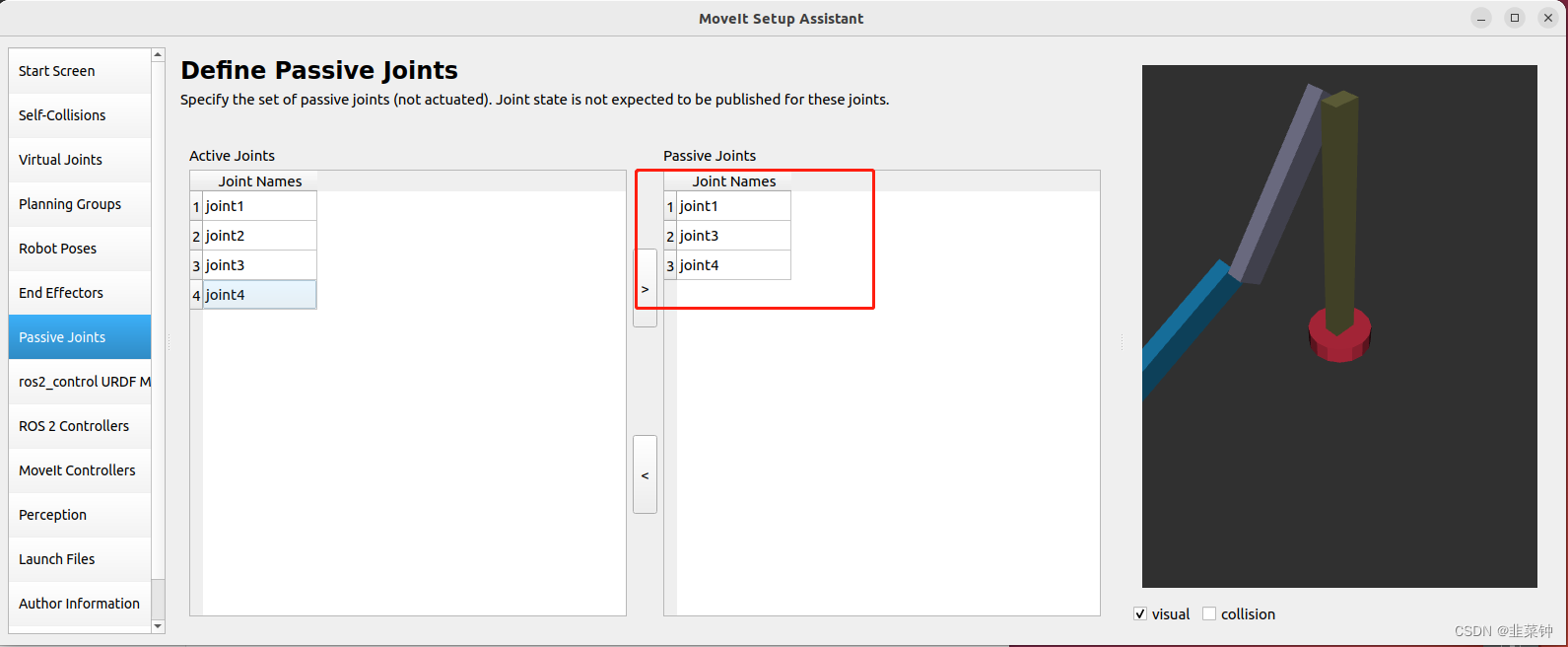
设置好主动关节和从动关节
 可以看到,虽然像那么一回事了,虽然末端还是会抖动。
可以看到,虽然像那么一回事了,虽然末端还是会抖动。
四连杆机构
主要的难点在于urdf无法描述闭环的结构树。理论上base_link2是要固定到base_link上的,但是不允许这样做。
因此只能在moveIt中控制好终端机构的位姿来见解实现了。
曲柄滑块机构
如何在moveit中实现下面这个曲柄滑块机构?【图像来源】
 思路和前面的四连杆机构类似,
思路和前面的四连杆机构类似,
{kind=link}
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结