不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页技术杂谈

深度解析:网站快速收录与用户体验的关系

Windows下从零开始基于Ollama与Open-WebUI本地部署deepseek R1详细指南(包含软件包和模型网盘下载)

Scrum Coach - 从站会开始的蜕变

MWORKS 2025a | 模型降阶与融合仿真工具聚焦用户体验全面升级
设计模式总结,大白话、精简、通俗
在 Open WebUI+Ollama 上运行 DeepSeek-R1-70B 实现调用

低代码开发中的创新实践

无人机目标飞行跟踪
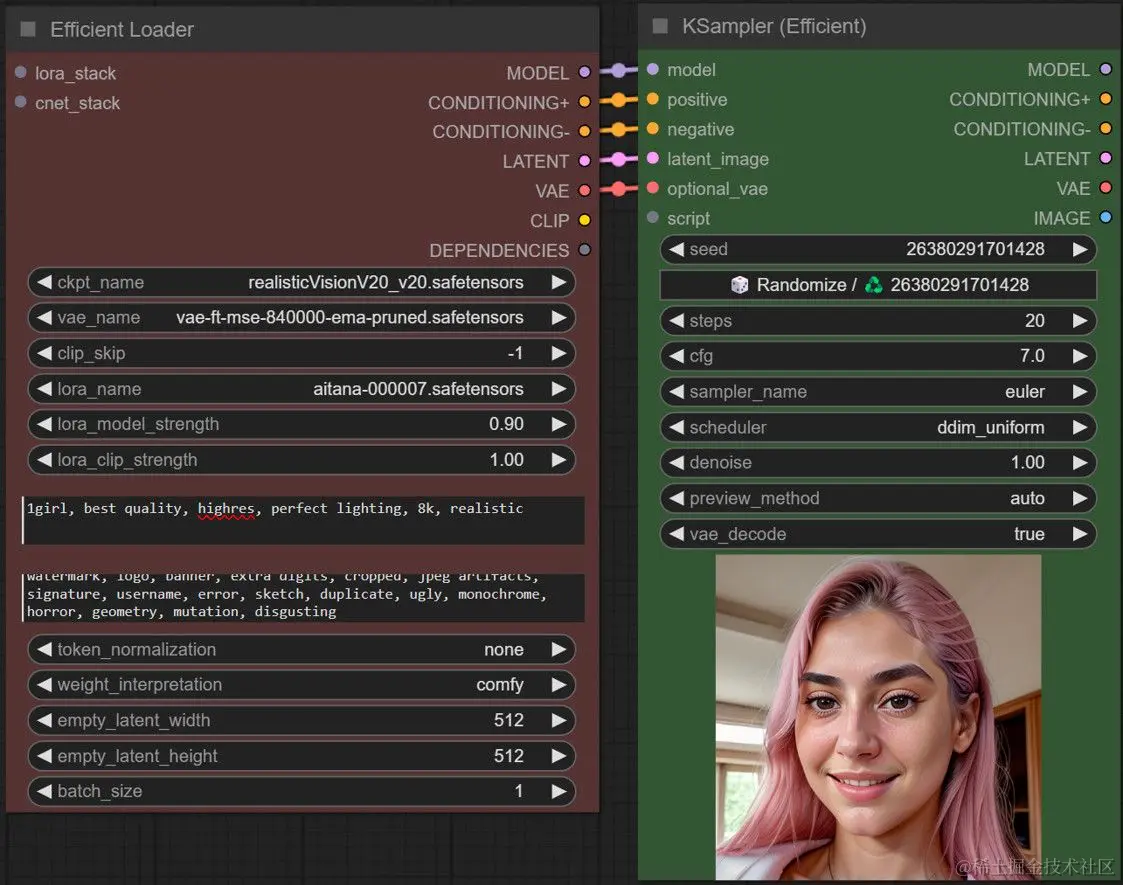
【stable diffusion】ComfyUI 使用 LoRA 极简工作流
基于ESP32S3的自适应轮腿机器人,足部选用4010无刷电机直驱,腿部选用舵机进行控制,主控板含有麦克风和功放模块,后期将实现开发ESP32离线语音控制。




点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结