不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页学无止境
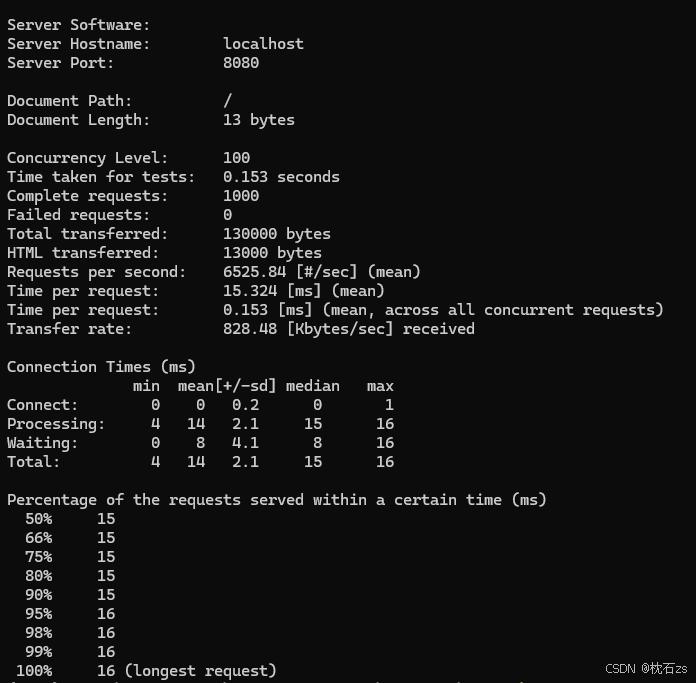
Go 与 FastAPI 性能对比:哪个更适合你的高并发应用

【Gee-Web框架】【Day5】【Golang】中间件

在 Open WebUI+Ollama 上运行 DeepSeek-R1-70B 实现调用
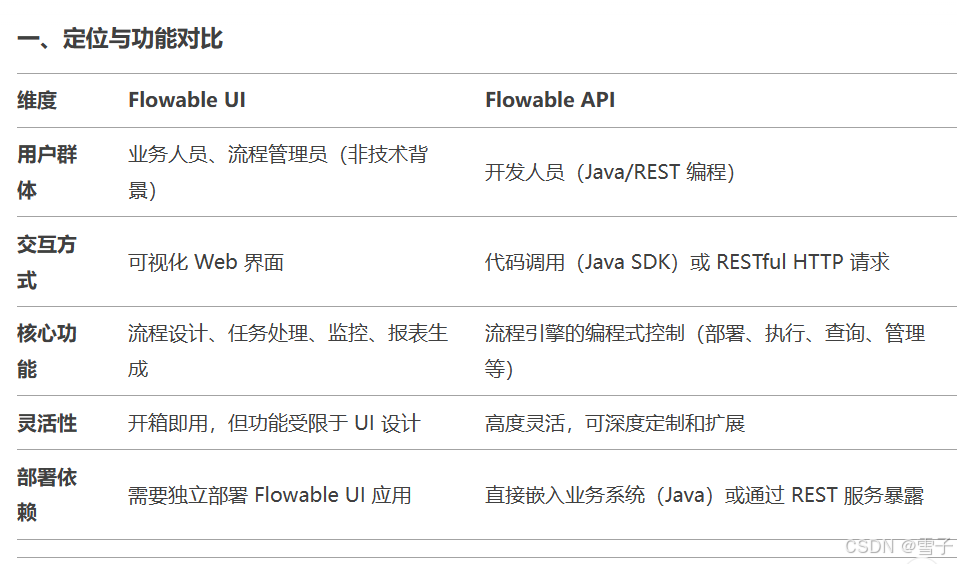
flowable ui和flowable api 的对应关系(结合使用场景)

windows平台本地部署DeepSeek大模型+Open WebUI网页界面(可以离线使用)
Unity3d UI层级穿透之间的学习,实现点击空白区区域关闭UI界面

Ollama+WebUI+DeepSeek部署自己的本地大模型
CMMI能帮到《哪吒》吗?

Scrum概念整理

LabVIEW用户界面(UI)和用户体验(UX)设计





点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结