不要轻易放弃。学习成长的路上,我们长路漫漫,只因学无止境。 网站首页其他

搜维尔科技在动作捕捉与动画制作、汽车制造与安全测试、机器人与自动化领域的一些案例

大疆无人机指令飞行JWT认证

关于deepseek的一些普遍误读
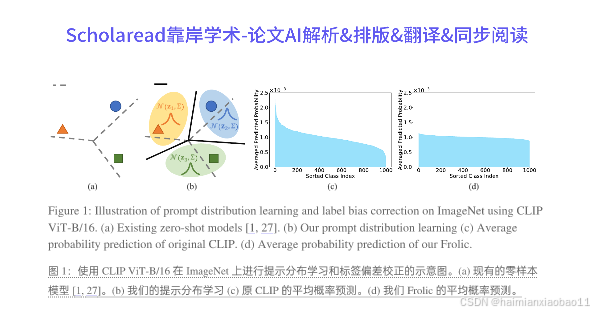
Neurlps2024论文解析|Enhancing Zero-Shot Vision Models by Label-Free Prompt Distribution Learning and
【python 机器学习】sklearn删除低方差与相关系数

好好说话:深度学习扫盲

基于深度学习YOLOv5的自动驾驶目标检测系统详解

人工智能-视觉和算法(CNN)
AsyLnCPSO-RF|异步化的粒子群-随机森林-分类-降维|多变量特征筛选-分类预测|Matlab

Python 实现结合CNN、BiLSTM和SEBlock的多输入分类预测模型





点击排行
-
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... -
若依框架—基于AmazonS3实现OSS对象存储服务
 若依框架—基于AmazonS3实现OSS对象存储服务
若依框架—基于AmazonS3实现OSS对象存储服务 -
U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 -
stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) -
分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
- U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决
- stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程)
- 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效)
- Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结