您现在的位置是:首页 >学无止境 >【异步电机系列】电机参数离线辨识(含源码实现)网站首页学无止境
【异步电机系列】电机参数离线辨识(含源码实现)
【一、闲话
很久没有认真更新自己的博客了!正好这段时间在学习异步电机控制,所以把过程中的一些东西写下来,当是回顾也是备忘。本来想是把整个过程的问题和收获都记录下来的(包括硬件设计、mcu控制、算法等),但感觉要好费精力,所以这个异步电机系列就随缘更新吧!自己也是才接触电机控制,有不正确的地方还请多多指教!
文章中出现的一些名字和概念不理解的话建议可以查查资料哦,博主不可能把所有概念都讲的哦。
二、概述
我理解的异步电机控制分为开环控制和闭环控制(传统意义上也可以分为标量和矢量),开环一般为v/f控制,较简单,闭环又分为有无传感器。做闭环的话磁链观测器就很重要了,常分为电压型磁链观测器和电流型磁链观测器,而磁链观测器又跟电机参数息息相关,比如定子电阻对电压型磁链观测器的磁链幅值影响很大,所以我们就要对电机参数进行辨识,就引入今天的主题啦!当然你有现成的电机参数就不用辨识了。参数辨识分为在线辨识和离线辨识,今天的主题是离线辨识。
三、原理
整个工程实现都是参考的一篇硕士论文,最后会把论文贴出来,论文写的很清楚,接下来的原理都是论文上的内容哦。
论文地址:https://download.csdn.net/download/qq_35141454/87771052
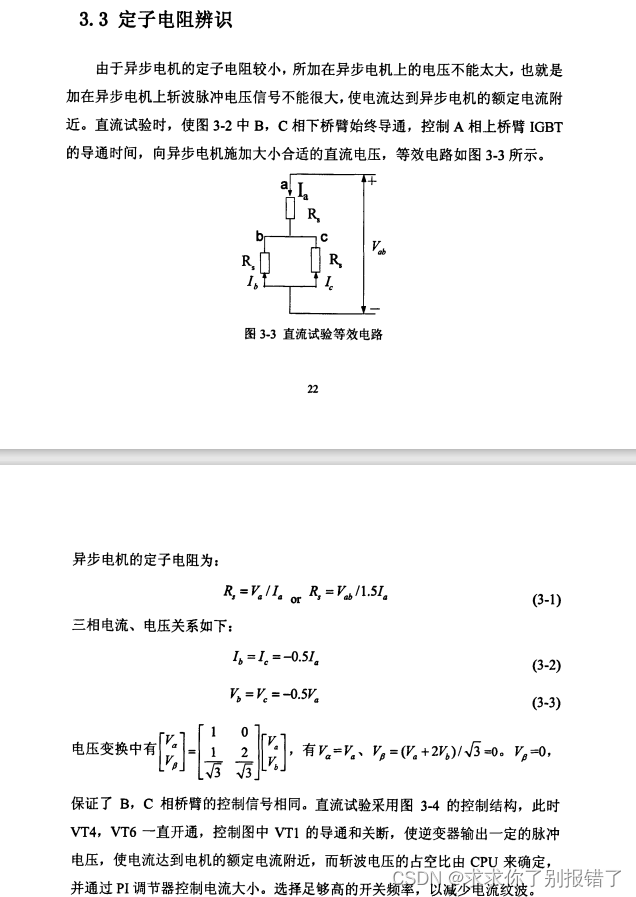
3.1 定子电阻辨识
原理就是单相直流试验,给电机某一相通一直流,利用电感通直流阻交流的特点,就可以得到电机的等效电路图,求得定子电阻。如下图,
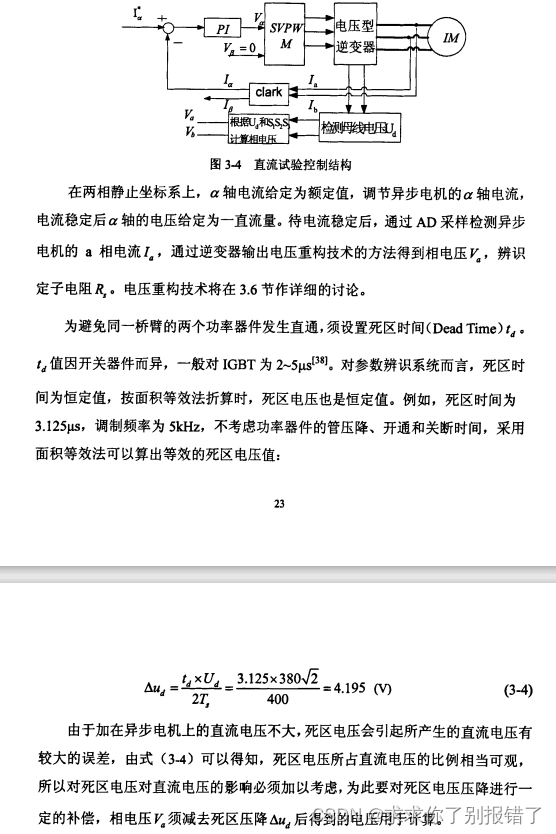
利用电流闭环先让电流稳定,然后在采集多个电流点,要考虑Mos管导通压降和死区时间的影响,最后通过最小二乘法计算定子电阻,工程实际应用流程如下,
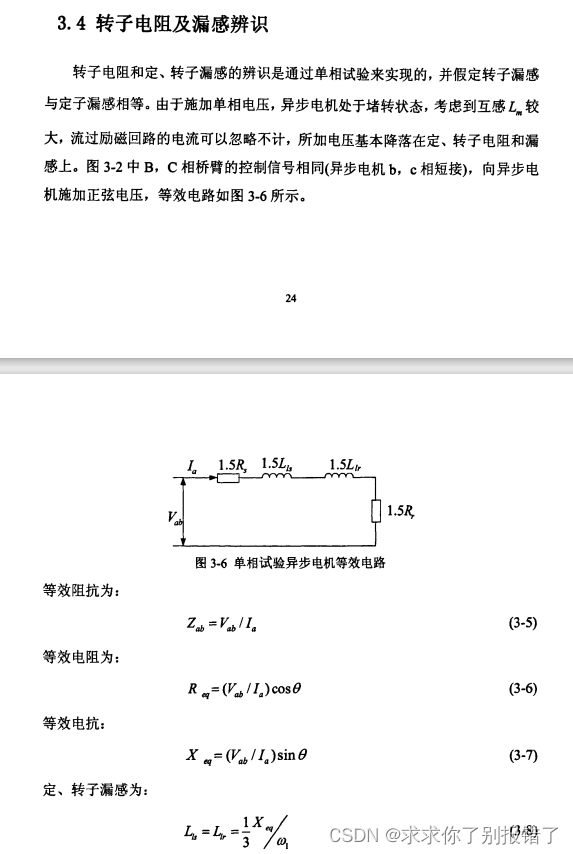
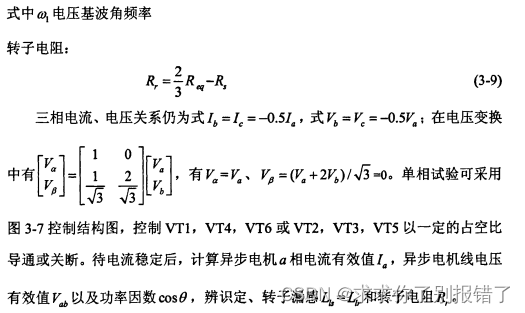
3.2 转子电阻及漏感辨识
原理为单相交流实验,其等效电路图与计算原理如下,
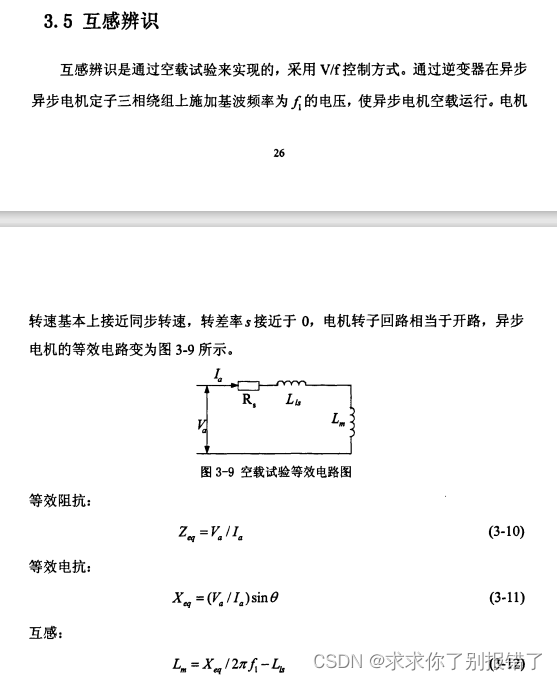
3.3 互感辨识
原理是空载试验,这时同步转速基本等于转子转速,电机转子回路相当于开路了。具体原理如下,
四、工程代码
大家应该最关心的是这个了吧,因为理论跟实践是两个东西,有同学肯定感同身受。认真看了代码可能会有疑惑,有些api找不到实现,比如获取三相电流电压,或者某些标志位,又或者一些平台相关的控制代码。这里博主想讲的是这个是一个具体实现思路,目的在于实现,不是要每个细节都体现出来,平台不一样一些东西就不一样(代码是gd32平台),理解了话就很容易了。(为什么会这么说,因为本人在看代码缺少一些具体实现的时候也会很苦恼,哈哈)
实现的c文件如下,
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* @brief: 异步电机参数辨识
* Change Logs:
* Date Author Notes
* 2023-04-20 liujian the first version
*/
#include "param_iden.h"
#include "bus_current.h"
#include <stdlib.h>
#include <string.h>
#include <math.h>
#if 1
// sqrt(3)
#define SQRT3 (1.732051f)
// sqrt(3)/3
#define SQRT3_DIV3 (0.577350f)
// 定子电阻辨识电流环kp
#define RS_KP (1.0f)
// 定子电阻辨识电流环ki
#define RS_TI (0.1f)
// Udc值
#define UDC_VALUE (72)
// 定子电阻辨识
rs_param_t m_rs_param = {0};
// sin0~90度的表
static int16_t g_sin0_90_table[] = {
0x0000,0x00C9,0x0192,0x025B,0x0324,0x03ED,0x04B6,0x057F,
0x0648,0x0711,0x07D9,0x08A2,0x096A,0x0A33,0x0AFB,0x0BC4,
0x0C8C,0x0D54,0x0E1C,0x0EE3,0x0FAB,0x1072,0x113A,0x1201,
0x12C8,0x138F,0x1455,0x151C,0x15E2,0x16A8,0x176E,0x1833,
0x18F9,0x19BE,0x1A82,0x1B47,0x1C0B,0x1CCF,0x1D93,0x1E57,
0x1F1A,0x1FDD,0x209F,0x2161,0x2223,0x22E5,0x23A6,0x2467,
0x2528,0x25E8,0x26A8,0x2767,0x2826,0x28E5,0x29A3,0x2A61,
0x2B1F,0x2BDC,0x2C99,0x2D55,0x2E11,0x2ECC,0x2F87,0x3041,
0x30FB,0x31B5,0x326E,0x3326,0x33DF,0x3496,0x354D,0x3604,
0x36BA,0x376F,0x3824,0x38D9,0x398C,0x3A40,0x3AF2,0x3BA5,
0x3C56,0x3D07,0x3DB8,0x3E68,0x3F17,0x3FC5,0x4073,0x4121,
0x41CE,0x427A,0x4325,0x43D0,0x447A,0x4524,0x45CD,0x4675,
0x471C,0x47C3,0x4869,0x490F,0x49B4,0x4A58,0x4AFB,0x4B9D,
0x4C3F,0x4CE0,0x4D81,0x4E20,0x4EBF,0x4F5D,0x4FFB,0x5097,
0x5133,0x51CE,0x5268,0x5302,0x539B,0x5432,0x54C9,0x5560,
0x55F5,0x568A,0x571D,0x57B0,0x5842,0x58D3,0x5964,0x59F3,
0x5A82,0x5B0F,0x5B9C,0x5C28,0x5CB3,0x5D3E,0x5DC7,0x5E4F,
0x5ED7,0x5F5D,0x5FE3,0x6068,0x60EB,0x616E,0x61F0,0x6271,
0x62F1,0x6370,0x63EE,0x646C,0x64E8,0x6563,0x65DD,0x6656,
0x66CF,0x6746,0x67BC,0x6832,0x68A6,0x6919,0x698B,0x69FD,
0x6A6D,0x6ADC,0x6B4A,0x6BB7,0x6C23,0x6C8E,0x6CF8,0x6D61,
0x6DC9,0x6E30,0x6E96,0x6EFB,0x6F5E,0x6FC1,0x7022,0x7083,
0x70E2,0x7140,0x719D,0x71F9,0x7254,0x72AE,0x7307,0x735E,
0x73B5,0x740A,0x745F,0x74B2,0x7504,0x7555,0x75A5,0x75F3,
0x7641,0x768D,0x76D8,0x7722,0x776B,0x77B3,0x77FA,0x783F,
0x7884,0x78C7,0x7909,0x794A,0x7989,0x79C8,0x7A05,0x7A41,
0x7A7C,0x7AB6,0x7AEE,0x7B26,0x7B5C,0x7B91,0x7BC5,0x7BF8,
0x7C29,0x7C59,0x7C88,0x7CB6,0x7CE3,0x7D0E,0x7D39,0x7D62,
0x7D89,0x7DB0,0x7DD5,0x7DFA,0x7E1D,0x7E3E,0x7E5F,0x7E7E,
0x7E9C,0x7EB9,0x7ED5,0x7EEF,0x7F09,0x7F21,0x7F37,0x7F4D,
0x7F61,0x7F74,0x7F86,0x7F97,0x7FA6,0x7FB4,0x7FC1,0x7FCD,
0x7FD8,0x7FE1,0x7FE9,0x7FF0,0x7FF5,0x7FF9,0x7FFD,0x7FFE };
/**
* @brief 等幅值clarke变换
* @param motor
* @return
*/
void ea_clarke(ea_clarke_t *model)
{
model->outa = model->ina;
model->outb = SQRT3_DIV3 * (model->inb*2 + model->ina);
}
/**
* @brief pi控制器
* @param motor
* @return
*/
void pi_controller(m_pid_t *model)
{
float tmp = 0;
float ek = model->target - model->current;
model->ek_sum = model->ek_sum_last + ek;
tmp = model->ki * model->ek_sum;
// 限制积分饱和
if ((tmp - model->max) > 0.00001f)
tmp = model->max;
else if((tmp - model->min) < 0.00001f)
tmp = model->min;
model->output = tmp + ek * model->kp;
// 限制输出
if ((model->output - model->max) > 0.00001f)
model->output = model->max;
else if((model->output - model->min) < 0.00001f)
model->output = model->min;
model->ek_sum_last = model->ek_sum;
}
/**
* @brief svpwm输出通道比较值
* @param motor
*/
uint16_t ccr1 = 0;
uint16_t ccr2 = 0;
uint16_t ccr3 = 0;
static void motor_svpwm(mrpark_t *target)
{
// 两个矢量作用时间
int32_t Tx = 0;
int32_t Ty = 0;
// 存放临时比例因子
float s1 = 0.0f;
float s2 = 0.0f;
// ABC三相作用时间
int32_t pha_time = 0;
int32_t phb_time = 0;
int32_t phc_time = 0;
// 用于计算扇区
uint8_t A = 0;
uint8_t B = 0;
uint8_t C = 0;
// 计算u1 u2 u3用于判断扇区和统计
int32_t U1 = target->u_beta;
int32_t U2 = (SQRT3 * target->u_alpha - target->u_beta)/2.0f;
int32_t U3 = (-SQRT3 * target->u_alpha - target->u_beta)/2.0f;
A = U1 > 0? 1:0;
B = U2 > 0? 1:0;
C = U3 > 0? 1:0;
// 计算扇区
uint8_t N = 4*C + 2*B + A;
// 将udc等放大32767倍
float k = SQRT3 * PWM_PERIOD / (UDC_VALUE*32767);
// 根据扇区各标量计算作用时间
switch (N)
{
case 3: // 扇区1
Tx = k * U2;// T4
Ty = k * U1;// T6
break;
case 1: // 扇区2
Tx = -k*U2;// T2
Ty = -k*U3;// T6
break;
case 5: // 扇区3
Tx = k*U1;// T2
Ty = k*U3;// T3
break;
case 4:
Tx = -k*U1;// T1
Ty = -k*U2;// T3
break;
case 6: // 扇区5
Tx = k*U3;// T1
Ty = k*U2;// T5
break;
case 2: // 扇区6
Tx = -k*U3;// T4
Ty = -k*U1;// T5
break;
}
// 作用时间大于TS则比例化
if ((Tx + Ty) > PWM_PERIOD)
{
s1 = Tx*1.0/(Tx+Ty);
s2 = Ty*1.0/(Tx+Ty);
Tx = s1 * PWM_PERIOD;
Ty = s2 * PWM_PERIOD;
}
// 计算ABC三相作用
switch( N )
{
case 3: // 扇区1
phc_time = (PWM_PERIOD - Tx - Ty )/2;
phb_time = phc_time+Ty;
pha_time = phb_time+Tx;
break;
case 1:// 扇区2
phc_time = (PWM_PERIOD - Tx - Ty )/2;
pha_time = (phc_time+Ty);
phb_time = (pha_time+Tx);
break;
case 5:// 扇区3
pha_time = (PWM_PERIOD - Tx - Ty )/2;
phc_time = pha_time+Ty;
phb_time = phc_time+Tx;
break;
case 4:// 扇区4
pha_time = (PWM_PERIOD - Tx - Ty )/2;
phb_time = pha_time+Ty;
phc_time = phb_time+Tx;
break;
case 6:// 扇区5
phb_time = (PWM_PERIOD - Tx - Ty )/2;
pha_time = phb_time+Ty;
phc_time = pha_time+Tx;
break;
case 2:// 扇区6
phb_time = (PWM_PERIOD - Tx - Ty )/2;
phc_time = phb_time+Ty;
pha_time = phc_time+Tx;
break;
default:
phb_time = 0;
phc_time = 0;
pha_time = 0;
break;
}
// 除以2的原因是PWM为中央对齐模式
ccr1 = pha_time/2;
ccr2 = phb_time/2;
ccr3 = phc_time/2;
// 设置pwm比较值
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, ccr1);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, ccr2);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, ccr3);
}
/**
* @brief 中值滤波
* @param motor
* @return
*/
static float median_filter(float *data, uint16_t len, uint8_t flag)
{
int i;
float min, max;
float sum = 0.0f;
float median = 0.0f;
if (NULL == data)
return 0;
min = data[0];
max = data[0];
for (i=0; i<len; i++)
{
sum += data[i];
if (data[i] - max > 0.000001f) // 找到最大值
{
max = data[i];
}
else if (data[i] - min < 0.000001f) // 找到最小值
{
min = data[i];
}
}
if (!flag)
median = (sum - min - max)/(len-2); // 去掉最大和最小求平均值
else
median = sum / len; // 直接求平均值
// rt_kprintf("min=%f, max=%f, median=%f
", min, max, median);
return median;
}
/**
* @brief 最小二乘法
* y =ax+b a=x
* @param motor
* @return
*/
static float least_square(float *data, uint16_t len)
{
}
/**
* @brief 定子参数辨识
* @param motor
* @return
*/
/* 目标电流个数 */
#define TARGET_CURRENT_CNT (15)
/* clarke变换 */
ea_clarke_t clarke;
/* 缓存vbus */
float vbus_tmp = 0.0f;
/* 目标电流 */
static float g_current_target_table[TARGET_CURRENT_CNT] = {1.0,1.2,1.4,1.6,1.8,2.0,2.2,2.4,2.6,2.8
,3.0,3.2,3.4,3.6,3.8};
void current_loop(void)
{
mrpark_t park;
// 获取三相电流
get_abc_current((float *)&clarke);
// 获取母线电压
vbus_tmp = get_vm_bus_voltage();
// 等幅值clarke变换
ea_clarke(&clarke);
// pi调节
m_rs_param.pid.current = -clarke.outa;
pi_controller(&m_rs_param.pid);
park.u_alpha = m_rs_param.pid.output*32767;
park.u_beta = 0;
// svpwm输出
motor_svpwm(&park);
}
/**
* @brief 定子参数辨识
* 为adc采集周期调用
* step1:等待目标电流稳定
* step2:计算单个目标电流均值
* step3:最小二乘法计算定子电阻
* @param None
* @return 0
*/
int iden_stator_resistance(void)
{
uint32_t i;
float vbus = 0.0f;
float tmp[TARGET_CURRENT_CNT] = {0};
// 电流闭环调节
current_loop();
switch (m_rs_param.state) {
case RS_LEVEL_STANDBY: // 等待目标电流稳定下来
m_rs_param.cnt++;
if (m_rs_param.cnt > PWM_HZ/10) // 100ms后开始计算
{
m_rs_param.cnt = 0;
// m_rs_param.mcnt = 0;
m_rs_param.state = RS_LEVEL_CALC1;
}
break;
case RS_LEVEL_CALC1: // 采样100个电压电流点,进行数字滤波
m_rs_param.isam1[m_rs_param.cnt] = -clarke.ina;
// 减去死区时间 deltaT/(2Ts)*udc的压降 减去Mos管导通压降
vbus = vbus_tmp * ((ccr1*2 - ccr2 - ccr3)/3.0/(PWM_PERIOD/2))
- (PWM_HZ*0.17/2000000*vbus_tmp); // 死区时间0.17us
- 0.0093*(-clarke.ina); // 导通电阻0.0093
m_rs_param.usam1[m_rs_param.cnt] = vbus;
m_rs_param.cnt++;
if (m_rs_param.cnt >= RS_SAMP_CNT)
{
// 中值滤波
m_rs_param.isam2[m_rs_param.mcnt] = median_filter(m_rs_param.isam1, RS_SAMP_CNT, 0);
m_rs_param.usam2[m_rs_param.mcnt] = median_filter(m_rs_param.usam1, RS_SAMP_CNT, 0);
m_rs_param.mcnt++;
// 目标电流集合采集计算完毕
if (m_rs_param.mcnt >= TARGET_CURRENT_CNT)
{
m_rs_param.mcnt = 0;
m_rs_param.state = RS_LEVEL_CALC2;
}
else // 计算下一个目标电流
{
m_rs_param.pid.target = m_rs_param.itable[m_rs_param.mcnt];
m_rs_param.state = RS_LEVEL_STANDBY;
m_rs_param.cnt = 0;
}
}
break;
case RS_LEVEL_CALC2:
// 中值滤波
m_rs_param.xmedian = median_filter(m_rs_param.isam2, TARGET_CURRENT_CNT, 1); // 计算x平均
m_rs_param.ymedian = median_filter(m_rs_param.usam2, TARGET_CURRENT_CNT, 1);// 计算y平均
for (i=0; i<TARGET_CURRENT_CNT; i++)
tmp[i] = m_rs_param.isam2[i] * m_rs_param.isam2[i];
m_rs_param.x2median = median_filter(tmp, TARGET_CURRENT_CNT, 1); // 计算x^2平均
for (i=0; i<TARGET_CURRENT_CNT; i++)
tmp[i] = m_rs_param.usam2[i] * m_rs_param.isam2[i];
m_rs_param.xymedian = median_filter(tmp, TARGET_CURRENT_CNT, 1);// 计算xy平均
// 最小二乘法求得定子电阻,电压与电流关系如下 U=ai+b,a为定子电阻
// m_rs_param.rs_res = ( (TARGET_CURRENT_CNT)*m_rs_param.xymedian- m_rs_param.xmedian* m_rs_param.ymedian)
// / ((TARGET_CURRENT_CNT)*m_rs_param.x2median - m_rs_param.xmedian * m_rs_param.xmedian);
m_rs_param.rs_res = m_rs_param.xymedian / m_rs_param.x2median;
m_rs_param.bres = m_rs_param.ymedian - (m_rs_param.xmedian*m_rs_param.rs_res);
// 关闭三项桥输出
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 停止计算
m_rs_param.state = RS_LEVEL_NONE;
m_rs_param.rs_start_flag = 0;
break;
default:break;
}
return 0;
}
/**
* @brief 定子参数辨识
* @param motor
* @return
*/
//int rs_start(int argc, char **argv)
int rs_start(void)
{
uint32_t cnt = 0;
float current[3] = {0};
float target = 0;
/*
if (argc < 2)
{
rt_kprintf("parameter < 2!
");
return -1;
}
target = atof(argv[1]);
*/
memset(&m_rs_param, 0, sizeof(rs_param_t));
m_rs_param.pid.kp = RS_KP;
m_rs_param.pid.ki = RS_TI;
m_rs_param.pid.min = 0.01;
m_rs_param.pid.max = 3.0; // 定子电阻很小,目标不能给很大,否则有烧坏电机和板子的风险
m_rs_param.i1_target = 1.2f;
m_rs_param.i2_target = target;//3.0f;
// 关闭三项桥
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 等待电流稳定后计算偏置电流
rt_thread_mdelay(20);
// 计算偏置电流
calc_phase_offset();
// 各个参数初始化
m_rs_param.state = RS_LEVEL_STANDBY;
m_rs_param.cnt = 0;
m_rs_param.mcnt = 0;
m_rs_param.itable = g_current_target_table; // 这个表的参考电流能给太大,否则烧坏电机和板子
m_rs_param.pid.target = g_current_target_table[0];//m_rs_param.i2_target;
m_rs_param.rs_start_flag = 1;
#if 1
rt_thread_mdelay(2000);
rt_kprintf("Rs=%f
", m_rs_param.rs_res);
#else
// 等待参数计算完毕
rt_thread_mdelay(2000);
while(1)
{
// get_abc_current(current);
// rt_kprintf("%d %f %f %f
", cnt, current[0], current[1], current[2]);
// rt_kprintf("%d %f %f %f %f %d %d %d
", cnt, clarke.ina, clarke.inb, clarke.inc,
// m_rs_param.pid.output, ccr1, ccr2,ccr3);
rt_kprintf("%d %f %f %f
", cnt, m_rs_param.isam2[cnt], m_rs_param.usam2[cnt], m_rs_param.usam2[cnt]/m_rs_param.isam2[cnt]);
cnt++;
if (cnt >= TARGET_CURRENT_CNT)
{
rt_kprintf("clac: %f %f %f %f %f %f
", m_rs_param.x2median, m_rs_param.xymedian,
m_rs_param.xmedian, m_rs_param.ymedian, m_rs_param.bres,m_rs_param.rs_res);
break;
}
rt_thread_mdelay(10);
}
#endif
return 0;
}
//MSH_CMD_EXPORT(rs_start, rs start);
rr_param_t g_rr_param = {0};
/**
* @brief 获取当前角度下的sin cos
* @param motor
*/
void get_sin_cos(theta_t *dtc)
{
uint8_t sector = 0;
uint16_t index = 0;
index = (dtc->theta) >> 6; //< 0~65535等比例缩小64倍,范围0~1024
//根据扇区计算sin和cos值
sector = (index & 0x300) >> 8; //0:0~255 1:256~511 2:512~767 3:767~1023
switch(sector)
{
case 0:// 0~90度
dtc->sin = (g_sin0_90_table[(uint8_t)(index)]);
dtc->cos = (g_sin0_90_table[(uint8_t)(0xFFu - (uint8_t)(index))]);
break;
case 1:// 90~180度
dtc->sin = (g_sin0_90_table[(uint8_t)(0xFFu - (uint8_t)(index))]);
dtc->cos = (-g_sin0_90_table[(uint8_t)(index)]);
break;
case 2:// 180~270度
dtc->sin = ( -g_sin0_90_table[(uint8_t)(index)]);
dtc->cos = (-g_sin0_90_table[(uint8_t)(0xFFu - (uint8_t)(index))]);
break;
case 3:// 270~360度
dtc->sin = (-g_sin0_90_table[(uint8_t)(0xFFu - (uint8_t)(index))]);
dtc->cos = (g_sin0_90_table[(uint8_t)(index)]);
break;
}
}
static complex result = {0};
/**
* @brief 离散傅里叶变换
* @param
*/
void dft_calc(float *input, int k, uint16_t num)
{
int n = 0;
complex sum;
complex point;//[RR_SAM_CNT];
sum.real = 0;
sum.imag = 0;
uint16_t N = num;
for(n=0; n<N; n++)
{
// point[n].real = cos(2*M_PI/N*k*n)*input[n]; //运用欧拉公式把复数拆分成实部和虚部
// point[n].imag = -sin(2*M_PI/N*k*n)*input[n];
// sum.real += point[n].real;//对每一个点的实部求和
// sum.imag += point[n].imag;
point.real = cos(2*M_PI/N*k*n)*input[n]; //运用欧拉公式把复数拆分成实部和虚部
point.imag = -sin(2*M_PI/N*k*n)*input[n];
sum.real += point.real;//对每一个点的实部求和
sum.imag += point.imag;
//对每一个点的虚部求和
}
result.real = sum.real;
result.imag = sum.imag;
}
/**
* @brief 转子电阻和漏感参数辨识
* adc中断调用
* @param None
* @return 0
*/
int irr_current_intr_handler(void)
{
float i_tmp[3] = {0};
float vbus_tmp = 0.0f;
static float last_i = 0.0f;
float cur = 0.0f;
// 获取三相电流
get_abc_current(i_tmp);
// 获取母线电压
vbus_tmp = get_vm_bus_voltage();
// 低通滤波 这样会导致相位后移
// cur = ((i_tmp[0] / 10000.0 + 0.0003 * last_i) / (0.0004));
// last_i = cur;
g_rr_param.isam[g_rr_param.cnt] = -i_tmp[0];//cur;
g_rr_param.usam[g_rr_param.cnt] = vbus_tmp * (ccr1 - ccr2)/(PWM_PERIOD/2.0) //Va-Vb - 死区电压-Mos管压降
- (PWM_HZ*0.17/2000000*vbus_tmp)
- 0.0093*(i_tmp[0]);
g_rr_param.cnt++;
// 采集一周期数据完成
if (g_rr_param.cnt >= RR_SAM_CNT)
{
g_rr_param.rr_start_flag = 0;
g_rr_param.rr_start_flag1 = 0;
g_rr_param.cnt = 0;
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 电流傅里叶变换 (2/N)*(求和x(n)cos(2*pi*n*k/N)-j求和x(n)sin(2*pi*n*k/N))
dft_calc(g_rr_param.isam, 1, RR_SAM_CNT); //k=1,求的是基波频率的傅里叶变换
g_rr_param.i_dft.real = result.real*2/RR_SAM_CNT;
g_rr_param.i_dft.imag = result.imag*2/RR_SAM_CNT;
// 求电流基波分量幅值
g_rr_param.i_amp = sqrt(g_rr_param.i_dft.real*g_rr_param.i_dft.real
+ g_rr_param.i_dft.imag*g_rr_param.i_dft.imag);
// 电压傅里叶变换
dft_calc(g_rr_param.usam, 1, RR_SAM_CNT); //k=1,求的是基波频率的傅里叶变换
g_rr_param.u_dft.real = result.real*2/RR_SAM_CNT;
g_rr_param.u_dft.imag = result.imag*2/RR_SAM_CNT;
// 求电压基波分量幅值
g_rr_param.u_amp = sqrt(g_rr_param.u_dft.real*g_rr_param.u_dft.real
+ g_rr_param.u_dft.imag*g_rr_param.u_dft.imag);
// 求功率因数角cos值( Ua*Ia + Ub*Ib)/u_amp*i_amp
g_rr_param.acos = ((g_rr_param.i_dft.real*g_rr_param.u_dft.real)
+(g_rr_param.i_dft.imag*g_rr_param.u_dft.imag))
/(g_rr_param.u_amp * g_rr_param.i_amp);
// 求功率因数角sin值( Ub*Ia - Ua*Ib)/u_amp*i_amp
g_rr_param.asin = ((g_rr_param.u_dft.imag*g_rr_param.i_dft.real)
- (g_rr_param.u_dft.real*g_rr_param.i_dft.imag))
/(g_rr_param.u_amp * g_rr_param.i_amp);
// 求得转子电阻 Rr=(Vab/Ia)cos*(2/3)-Rs
g_rr_param.rr = (g_rr_param.u_amp/g_rr_param.i_amp)*g_rr_param.acos*2/3.0;
// 求得转子漏感和定子漏感 lls=llr=(Vab/Ia)sin/3/2*pi*f
g_rr_param.lls = (g_rr_param.u_amp/g_rr_param.i_amp)*g_rr_param.asin/3.0/(2*M_PI*BASE_VOL_FREQ);
g_rr_param.llr = g_rr_param.lls;
}
}
/**
* @brief 转子电阻和漏感参数辨识
* pwm更新中断调用
* @param None
* @return 0
*/
int irr_pwm_intr_handler(void)
{
mrpark_t park;
// 每个pwm周期转了多少转
float cycle_freq = ((float)(BASE_VOL_FREQ)/(float)PWM_HZ);
g_rr_param.theta += round(cycle_freq * 65535); // 放大65535倍,每次加freq_ * 65535
get_sin_cos((theta_t *)&g_rr_param);
park.u_alpha = BASE_VAL_AMP * g_rr_param.cos;
park.u_beta = 0;
// svpwm输出
motor_svpwm(&park);
}
//int rr_start(int argc, char **argv)
int rr_start(void)
{
int cnt = 0;
memset(&g_rr_param, 0, sizeof(rr_param_t));
// 关闭三相桥
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 等待电流稳定后计算偏置电流
rt_thread_mdelay(20);
// 计算偏置电流
calc_phase_offset();
// 开启pwm
g_rr_param.rr_start_flag = 1;
// 等待输出稳定
rt_thread_mdelay(200);
// 开启adc采集
g_rr_param.rr_start_flag1 = 1;
// 等待数据结果
rt_thread_mdelay(2000);
#if 1
// g_rr_param.rr = g_rr_param.rr - m_rs_param.rs_res;
rt_kprintf("Rr=%f llr=%f lls=%f
", g_rr_param.rr, g_rr_param.llr, g_rr_param.llr);
#else
while (1)
{
rt_kprintf("%d %f %f %d %d
", cnt, g_rr_param.isam[cnt], g_rr_param.usam[cnt], ccr1, ccr2);
cnt++;
if (cnt >= RR_SAM_CNT)
{
rt_kprintf("total:%f %f %f %f %f %f %f
", g_rr_param.i_dft.real, g_rr_param.i_dft.imag
, g_rr_param.i_amp, g_rr_param.u_dft.real,g_rr_param.u_dft.imag,g_rr_param.u_amp
,g_rr_param.acos);
rt_kprintf("Rr=%f llr=%f
", g_rr_param.rr, g_rr_param.llr);
break;
}
rt_thread_mdelay(10);
}
#endif
}
//MSH_CMD_EXPORT(rr_start, rr start);
lm_param_t g_lm_param = {0};
/**
* @brief 互感参数辨识
* pwm更新中断调用
* @param None
* @return 0
*/
int ilm_pwm_intr_handler(void)
{
mrpark_t park;
// 每个pwm周期转了多少转
float cycle_freq = ((float)(ILM_BASE_VOL_FREQ)/(float)PWM_HZ);
g_lm_param.theta += round(cycle_freq * 65535); // 放大65535倍,每次加freq_ * 65535
get_sin_cos((theta_t *)&g_lm_param);
park.u_alpha = ILM_BASE_VAL_AMP * g_lm_param.cos;
park.u_beta = ILM_BASE_VAL_AMP * g_lm_param.sin;
// svpwm输出
motor_svpwm(&park);
}
/**
* @brief 互感参数辨识
* adc中断调用
* @param None
* @return 0
*/
int ilm_current_intr_handler(void)
{
float i_tmp[3] = {0};
float vbus_tmp = 0.0f;
static float last_i = 0.0f;
float cur = 0.0f;
// 获取三相电流
get_abc_current(i_tmp);
// 获取母线电压
vbus_tmp = get_vm_bus_voltage();
// 低通滤波 这样会导致相位后移
// cur = ((i_tmp[0] / 10000.0 + 0.0003 * last_i) / (0.0004));
// last_i = cur;
g_lm_param.isam[g_lm_param.cnt] = -i_tmp[0];//cur;
g_lm_param.usam[g_lm_param.cnt] = vbus_tmp * ((ccr1*2 - ccr2 - ccr3)/3.0/(PWM_PERIOD/2)); //Va - 死区电压-Mos管压降
// - (PWM_FREQUENCY*0.17/2000000*vbus_tmp)
// - 0.0093*(i_tmp[0]);;
g_lm_param.cnt++;
// 采集一周期数据完成
if (g_lm_param.cnt >= LM_SAM_CNT)
{
g_lm_param.lm_start_flag = 0;
g_lm_param.lm_start_flag1 = 0;
g_lm_param.cnt = 0;
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 电流傅里叶变换 (2/N)*(求和x(n)cos(2*pi*n*k/N)-j求和x(n)sin(2*pi*n*k/N))
dft_calc(g_lm_param.isam, 1, LM_SAM_CNT); //k=1,求的是基波频率的傅里叶变换
g_lm_param.i_dft.real = result.real*2.0/LM_SAM_CNT;
g_lm_param.i_dft.imag = result.imag*2.0/LM_SAM_CNT;
// 求电流基波分量幅值
g_lm_param.i_amp = sqrt(g_lm_param.i_dft.real*g_lm_param.i_dft.real
+ g_lm_param.i_dft.imag*g_lm_param.i_dft.imag);
// 电压傅里叶变换
dft_calc(g_lm_param.usam, 1, LM_SAM_CNT); //k=1,求的是基波频率的傅里叶变换
g_lm_param.u_dft.real = result.real*2.0/LM_SAM_CNT;
g_lm_param.u_dft.imag = result.imag*2.0/LM_SAM_CNT;
// 求电压基波分量幅值
g_lm_param.u_amp = sqrt(g_lm_param.u_dft.real*g_lm_param.u_dft.real
+ g_lm_param.u_dft.imag*g_lm_param.u_dft.imag);
// 求功率因数角cos值( Ua*Ia + Ub*Ib)/u_amp*i_amp
// g_lm_param.acos = ((g_lm_param.i_dft.real*g_lm_param.u_dft.real)
// +(g_lm_param.i_dft.imag*g_lm_param.u_dft.imag))
// /(g_lm_param.u_amp * g_lm_param.i_amp);
// 求功率因数角sin值( Ub*Ia - Ua*Ib)/u_amp*i_amp
g_lm_param.asin = ((g_lm_param.u_dft.imag*g_lm_param.i_dft.real)
- (g_lm_param.u_dft.real*g_lm_param.i_dft.imag))
/(g_lm_param.u_amp * g_lm_param.i_amp);
// 求得转子漏感和定子漏感 lls=llr=(Vab/Ia)sin/3/2*pi*f
g_lm_param.lm = (g_lm_param.u_amp/g_lm_param.i_amp)*g_lm_param.asin/(2*M_PI*ILM_BASE_VOL_FREQ);
}
}
//int lm_start(int argc, char **argv)
int lm_start(void)
{
int cnt = 0;
memset(&g_lm_param, 0, sizeof(lm_param_t));
// 关闭三相桥
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_0, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_1, 0);
timer_channel_output_pulse_value_config(TIMER7, TIMER_CH_2, 0);
// 等待电流稳定后计算偏置电流
rt_thread_mdelay(20);
// 计算偏置电流
calc_phase_offset();
// 开启pwm
g_lm_param.lm_start_flag = 1;
// 等待输出稳定
rt_thread_mdelay(3000);
// 开启adc采集
g_lm_param.lm_start_flag1 = 1;
// 等待数据结果
rt_thread_mdelay(2000);
#if 1
rt_kprintf("Lm=%f
", g_lm_param.lm);
#else
while (1)
{
rt_kprintf("%d %f %f %d %d
", cnt, g_lm_param.isam[cnt], g_lm_param.usam[cnt], ccr1, ccr2);
cnt++;
if (cnt >= LM_SAM_CNT)
{
rt_kprintf("total:%f %f %f %f %f %f %f
", g_lm_param.i_dft.real, g_lm_param.i_dft.imag
, g_lm_param.i_amp, g_lm_param.u_dft.real,g_lm_param.u_dft.imag,g_lm_param.u_amp
,g_lm_param.asin);
rt_kprintf("Lm=%f
", g_lm_param.lm);
break;
}
rt_thread_mdelay(10);
}
#endif
}
//MSH_CMD_EXPORT(lm_start, lm start);
#if 1
motor_iden_param_t param = {0};
motor_iden_param_t *get_motor_iden_param(void)
{
return ¶m;
}
int start_iden(int argc, char **argv)
{
int i;
int cnt = 0;
float rs_sum = 0.0f;
float rr_sum = 0.0f;
float llr_sum = 0.0f;
float lls_sum = 0.0f;
float lm_sum = 0.0f;
if (argc < 2)
{
rt_kprintf("argc <2!
");
return -1;
}
cnt = atoi(argv[1]);
for (i=0; i<cnt; i++)
{
rs_start();
rt_thread_mdelay(100);
rr_start();
g_rr_param.rr = g_rr_param.rr - m_rs_param.rs_res;
rt_thread_mdelay(100);
lm_start();
g_lm_param.lm = g_lm_param.lm - g_rr_param.llr;
// rt_kprintf("*********************************iden total*********************************
");
rt_kprintf("****(%d): Rs=%f,Rr=%f,Llr=Lls=%f,Lm=%f
",i+1, m_rs_param.rs_res, g_rr_param.rr
,g_rr_param.llr, g_lm_param.lm);
// rt_kprintf("************************************end*************************************
");
rs_sum += m_rs_param.rs_res;
rr_sum += g_rr_param.rr;
llr_sum += g_rr_param.llr;
lls_sum = llr_sum;
lm_sum += g_lm_param.lm;
rt_thread_mdelay(100);
}
// rt_base_t level = rt_hw_interrupt_disable();
param.calc_rs = rs_sum/cnt;
param.calc_rr = rr_sum/cnt;
param.calc_lm = lm_sum/cnt;
param.calc_ls = lls_sum/cnt + param.calc_lm;
param.calc_lr = llr_sum/cnt + param.calc_lm;
param.calc_sigma = 1-(param.calc_lm*param.calc_lm)/((param.calc_ls)*(param.calc_lr));
// rt_hw_interrupt_enable(level);
rt_kprintf("**************iden param***********
");
rt_kprintf("* Rs: %f *
", param.calc_rs);
rt_kprintf("* Rr: %f *
", param.calc_rr);
rt_kprintf("* ls: %f *
", param.calc_ls);
rt_kprintf("* lr: %f *
", param.calc_lr);
rt_kprintf("* Lm: %f *
", param.calc_lm);
rt_kprintf("* sig: %f *
", param.calc_sigma);
rt_kprintf("* llr: %f *
", llr_sum/cnt);
rt_kprintf("**************iden end************
");
}
MSH_CMD_EXPORT(start_iden, iden param);
#endif
#endif
头文件如下,
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2023-04-20 lj the first version
*/
#ifndef APPLICATIONS_THREE_PHASE_MOTOR_PARAM_IDEN_H_
#define APPLICATIONS_THREE_PHASE_MOTOR_PARAM_IDEN_H_
#include <stdint.h>
// 设置pwm频率
#define PWM_HZ (10000)
// 频率
#define CALC_FREQ PWM_HZ
// pwm周期 时钟/频率
#define PWM_PERIOD (uint16_t)(200000000/PWM_HZ)
// 基波电压频率100hz
#define BASE_VOL_FREQ (200)
// 基波电压幅值
#define BASE_VAL_AMP (2.0f)
// 基波电压频率200hz
#define ILM_BASE_VOL_FREQ (200)
// 基波电压幅值
#define ILM_BASE_VAL_AMP (7.5f)
// RS采样次数
#define RS_SAMP_CNT (100)
// 单相交流采样点数 PWM_HZ/BASE_VOL_FREQ
#define RR_SAM_CNT (PWM_HZ/BASE_VOL_FREQ) //(100)
// 空载试验采样点数 PWM_HZ/ILM_BASE_VOL_FREQ
#define LM_SAM_CNT (PWM_HZ/ILM_BASE_VOL_FREQ)//(100)
typedef enum {
RS_LEVEL_NONE,
RS_LEVEL_STANDBY, // 电流稳定
RS_LEVEL_CALC1, // 计算第一次电流
RS_LEVEL_CALC2, // 计算第二次电流
}rs_state_t;
/**
* @brief pwm通道比较值
*/
typedef struct{
uint16_t ccr1; //pwm通道1比较值
uint16_t ccr2; //pwm通道2比较值
uint16_t ccr3; //pwm通道3比较值
}ccr_t;
typedef struct {
uint16_t theta;
float sin;
float cos;
}theta_t;
/**
* @brief 反park变化计算得到的alpha_beta
*/
typedef struct {
int32_t u_alpha;
int32_t u_beta;
}mrpark_t;
typedef struct {
float ina;
float inb;
float inc;
float outa;
float outb;
}ea_clarke_t;
/**
* @brief pid控制
*/
typedef struct {
float current; // 输入,当前
float target; // 输入,目标
float output; // 输出,d轴分量目标电流
float kp; // 比例
float ki; // 积分
float min; // 最小值
float max; // 最大值
float ek_sum; // 误差积分
float ek_sum_last; // 误差积分
}m_pid_t;
typedef struct {
float i1_target;
float i2_target;
m_pid_t pid;
float *itable;
float isam1[RS_SAMP_CNT];
float usam1[RS_SAMP_CNT];
float isam2[RS_SAMP_CNT];
float usam2[RS_SAMP_CNT];
float xmedian;
float ymedian;
float x2median;
float xymedian;
// float imedian[10];
// float umedian[10];
uint8_t rs_start_flag;
uint8_t state;
uint16_t cnt; // 记数节拍
uint16_t mcnt; // calc2记数节拍
float rs_res; //定子电阻
float bres; //定子电阻
}rs_param_t;
//复数结构体,用于实现傅里叶运算
typedef struct
{
double real,imag;
}complex;
typedef struct {
uint16_t theta;
float sin;
float cos;
float isam[RR_SAM_CNT];
float usam[RR_SAM_CNT];
complex i_dft;
complex u_dft;
float i_amp; // 电流幅值
float u_amp; // 电流幅值
float acos; // 功率因数角cos值
float asin; // 功率因数角sin值
float lls;
float llr;
float rr;
uint16_t cnt; //记数节拍
uint8_t rr_start_flag;
uint8_t rr_start_flag1;
}rr_param_t;
typedef struct {
uint16_t theta;
float sin;
float cos;
float isam[LM_SAM_CNT];
float usam[LM_SAM_CNT];
complex i_dft;
complex u_dft;
float i_amp; // 电流幅值
float u_amp; // 电流幅值
float acos; // 功率因数角cos值
float asin; // 功率因数角sin值
float lm;
uint16_t cnt; //记数节拍
uint8_t lm_start_flag;
uint8_t lm_start_flag1;
}lm_param_t;
typedef struct {
float calc_rs;
float calc_rr;
float calc_ls;
float calc_lr;
float calc_lm;
float calc_sigma;
}motor_iden_param_t;
extern rs_param_t m_rs_param;
extern rr_param_t g_rr_param;
extern lm_param_t g_lm_param;
motor_iden_param_t *get_motor_iden_param(void);
#endif /* APPLICATIONS_THREE_PHASE_MOTOR_PARAM_IDEN_H_ */






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结