您现在的位置是:首页 >其他 >mid360激光雷达跑Point-LIO算法网站首页其他
mid360激光雷达跑Point-LIO算法
简介mid360激光雷达跑Point-LIO算法
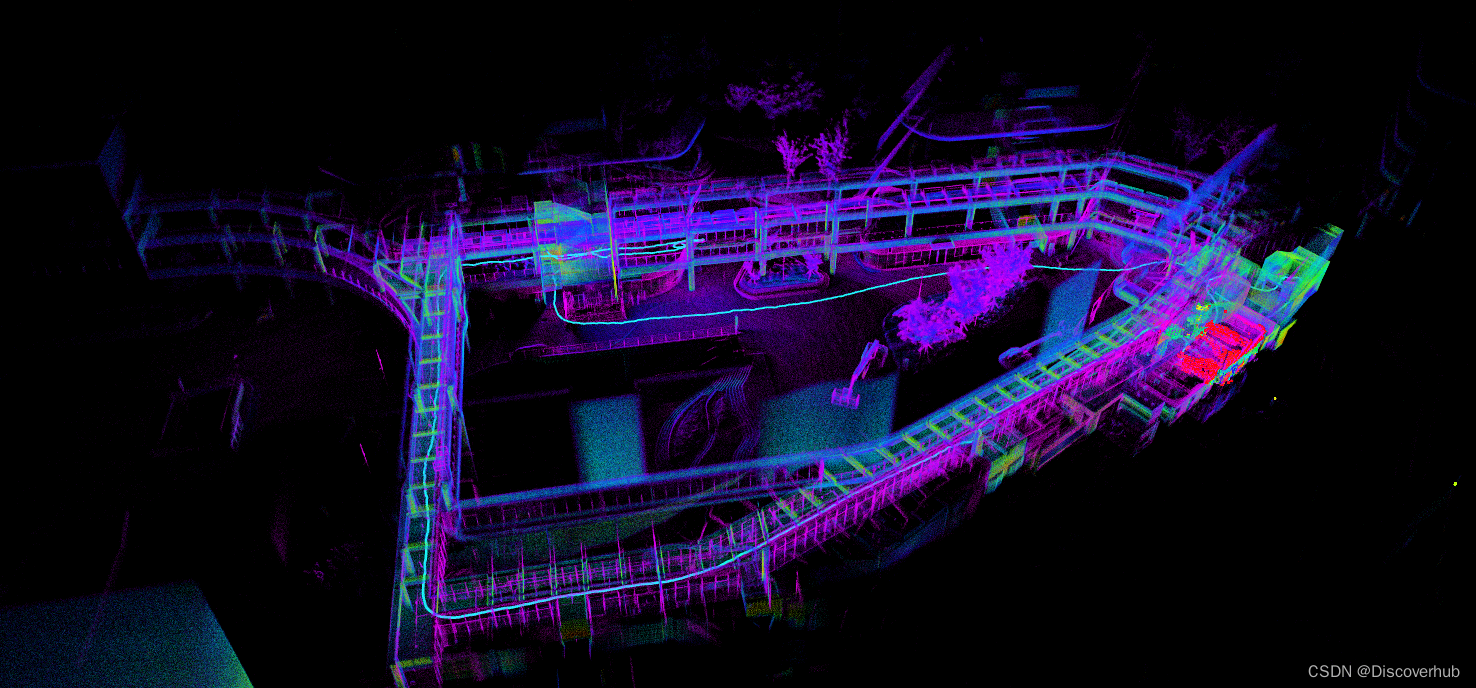
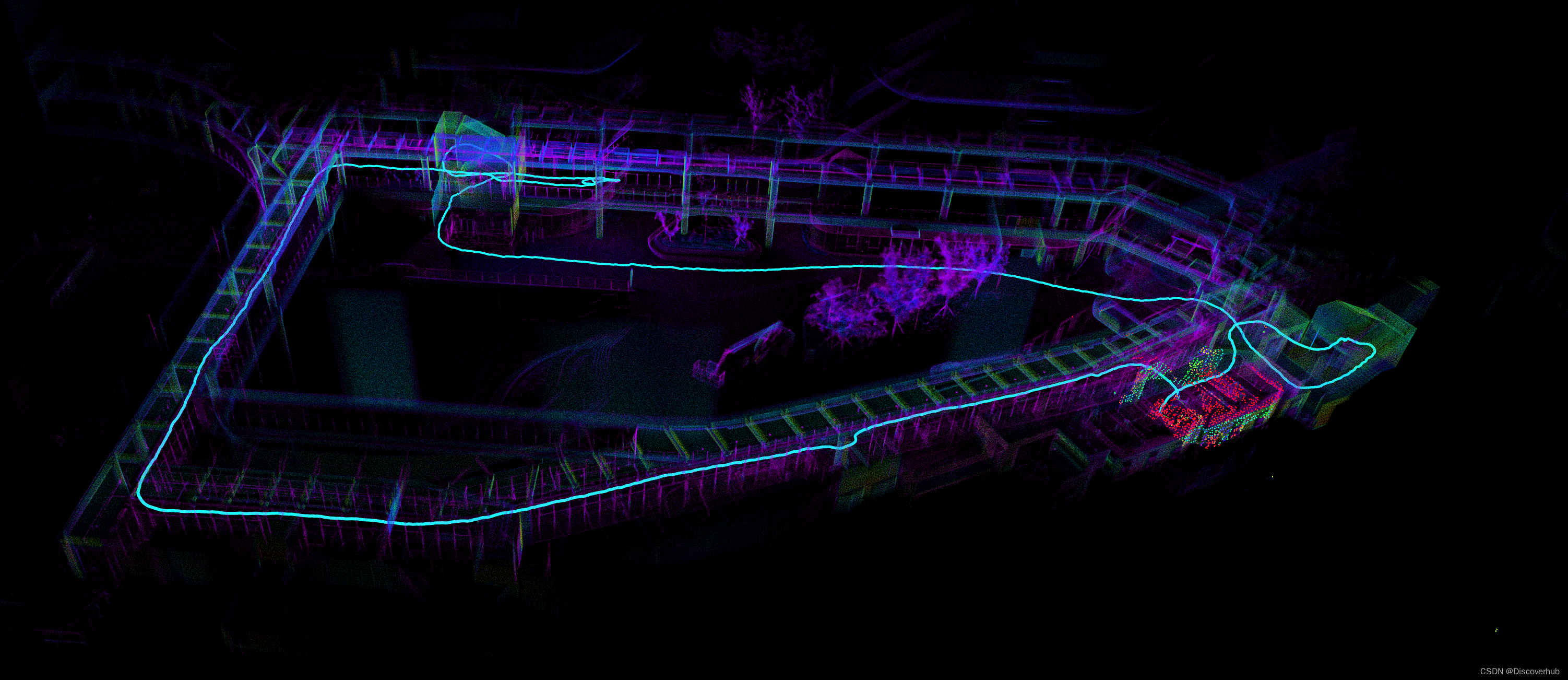
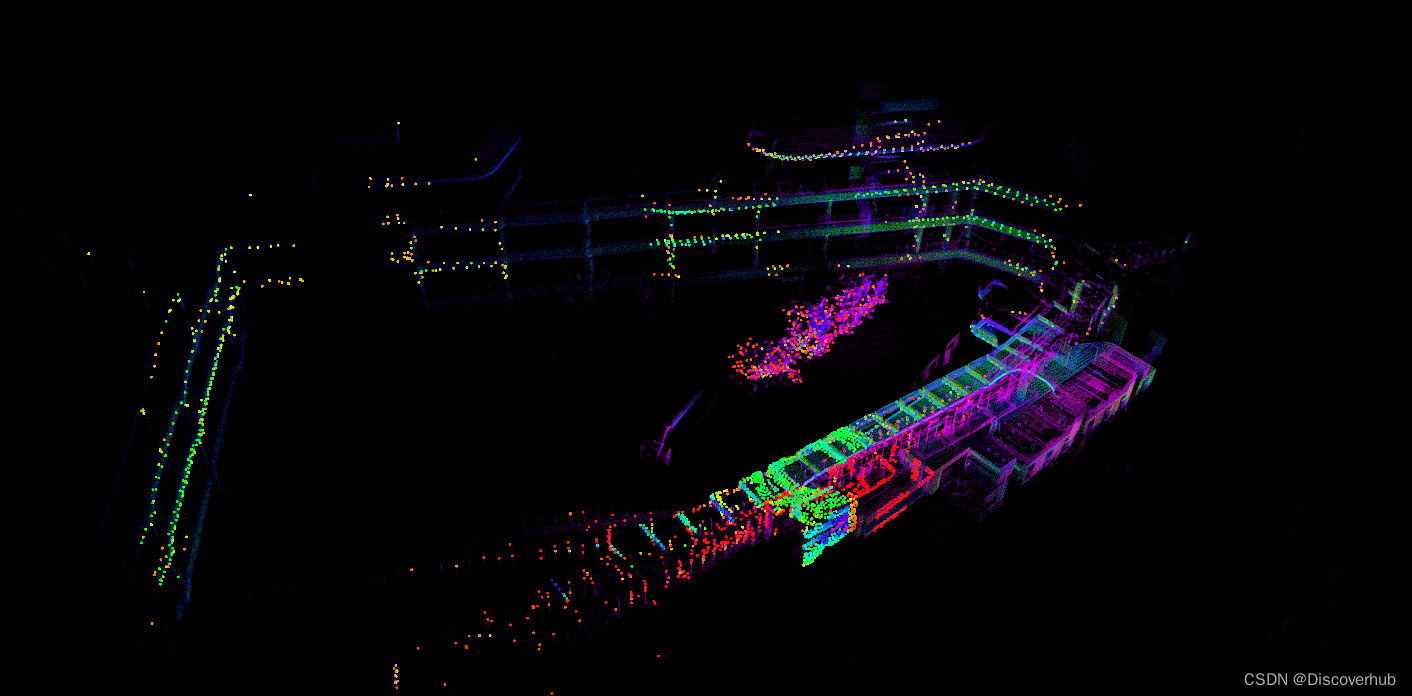
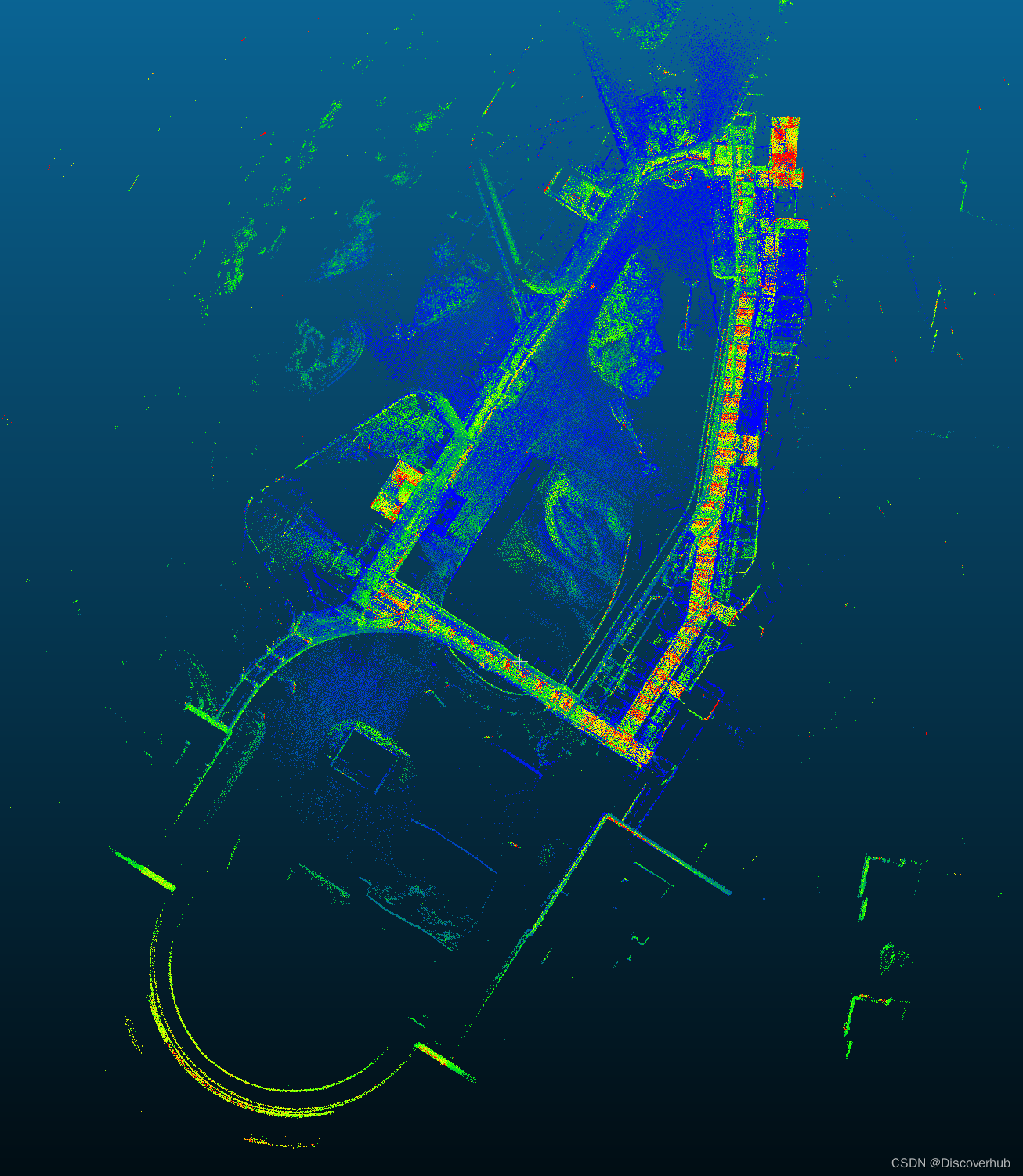
在商场里面上下楼穿梭,使用mid360激光雷达,完成建图
以下是建图的运行过程及参数配置
mid360激光雷达驱动
安装(ubuntu20.4 )
/ws_livox/src/livox_ros_driver2$source /opt/ros/noetic/setup.sh
/ws_livox/src/livox_ros_driver2$./build.sh ROS1
配置修改MID360_config.json
192.168.1.5,是本机ip
192.168.1.157是激光ip
57是激光雷达的sn号后两位
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结