您现在的位置是:首页 >技术教程 >论文阅读 | Interpolated Convolutional Networks for 3D Point Cloud Understanding网站首页技术教程
论文阅读 | Interpolated Convolutional Networks for 3D Point Cloud Understanding
前言:ICCV2019点云特征提取点卷积InterpoConv
Interpolated Convolutional Networks for 3D Point Cloud Understanding
引言
点云是不规则、无序、且稀疏的
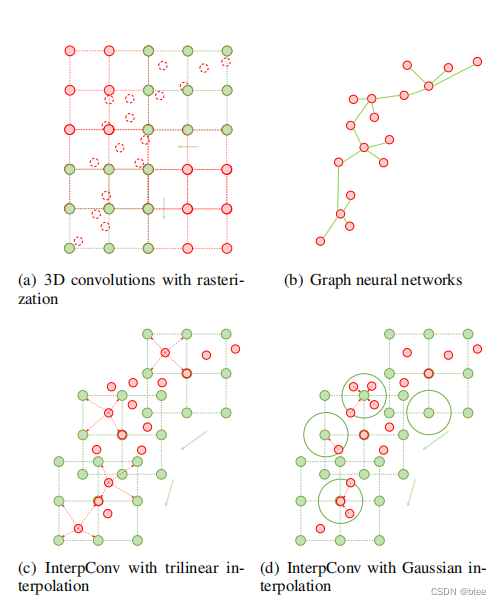
处理这样的点云数据有两大类方法
第一:voxel化
directly rasterize irregular point clouds into regular voxel grids, and adopts standard 3D convolutions to learn shape features.
缺点:会丢失掉一些几何信息,并且造成计算负担
the transformation of irregular inputs leads to a loss of geometric information, and convolutions on dense voxel grids lead to heavy computational burden.
第二:在欧几里得空间或特征空间建立一个局部图,然后用连续的核作用在每个图的边缘上,来学习到几何特征,这个连续的核的就用MLP来学习
缺点:图的构造不是稀疏不变的,点的密度不同导致图的构造不同
其次,用MLP学习连续核的效果不太好
这篇文章中,提出了一种l Interpolated Convolution operation (InterpConv)方法,用了离散的卷积核和插值方法来学习几何关系和权重坐标。
方法
离散卷积核

对不同位置的P‘,有一个对应的权重W(p’),与原有的不同邻点的特征相乘再相加
连续卷积核

对于一个(pdelat)相对位置,直接用MLP将相对位置映射到高维特征作为这个位置的权重
预测连续的卷积核的缺点在于,并不一定能其效果,预测的参数太多了并且很不高效
因此,我们的方法选择离散核的方式
构建离散核的同时保留距离信息,我们将这个构建的方式拆成两个步骤
空间离散核权重:
是一组长为C的向量
插值函数:核权重向量的坐标和输入邻点坐标
归一化参数Np
InterpConv公式如下
离散核
离散核维一组在3D欧几里得空间的向量,每个向量有一个3D坐标来存储C维向量,这个向量可以被初始化也可以被更新
坐标可以固定也可以被更新
我们在这里用立方体来存储核
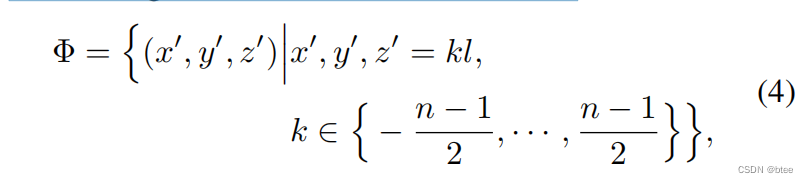
相对坐标作为核的3D位置坐标信息,同时对除以距离L。L表示两个相邻权重向量之间的距离。
距离L的作用,控制感受野,获得更精细的结构信息,当点很密集的时候
It determines the actual 3D size of a kernel in the Euclidean space and is defined to control the receptive field, from which one convolutional kernel can “see” input point clouds. If l is small, the convolutional kernel is able to capture fine-grained local structures, otherwise it encodes more global shape information.
插值函数
插值函数文中介绍了两种,一种是三线性插值,一种是高斯插值


归一化项
由于邻点数不固定,因此需要归一化
归一化的第一种方式,加权求和除以邻点数

第二种,加权求和除以权重的总和

伪代码
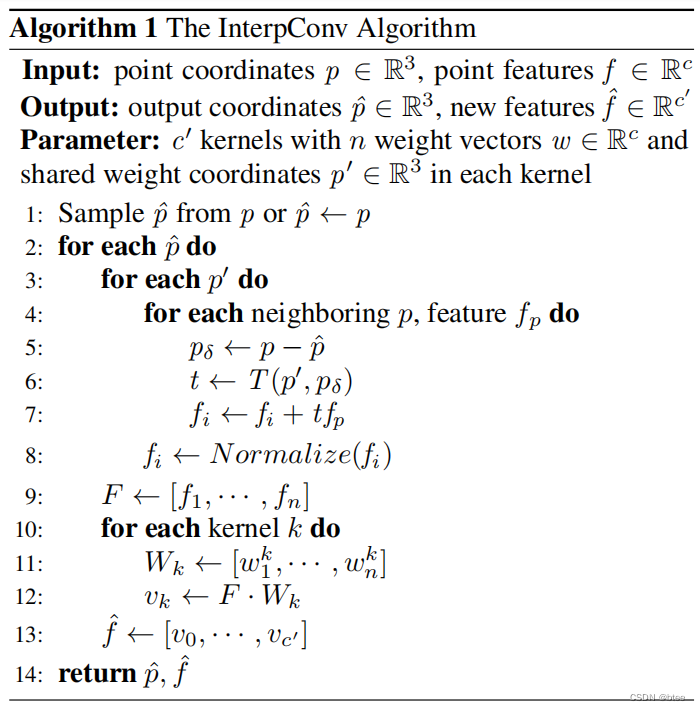
在所有输入点中采样p个点,对p个点中的每个点
对每个核的核点位置:
对每个邻点:
pdelta记录邻点的相对位置关系,将位置关系在位置核函数中进行插值,得到位置权重向量t
用得到的位置权重向量乘原始特征再相加,得到最终的每个点的聚合特征
得到不同核作用后的特征
用聚合后的特征与卷积核作用,得到卷积后的特征向量
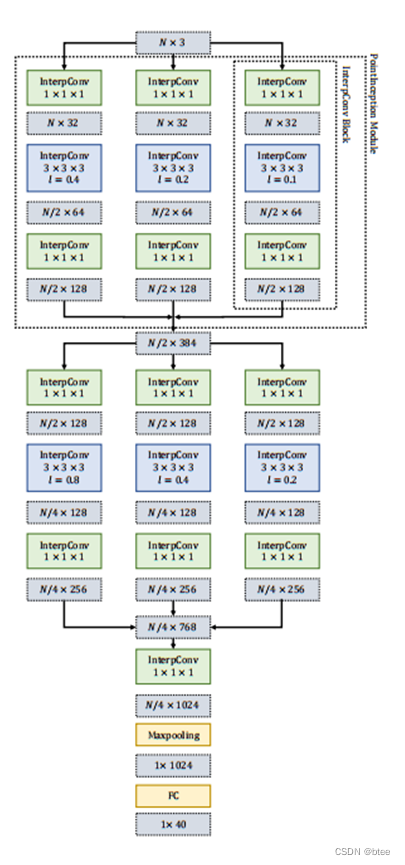
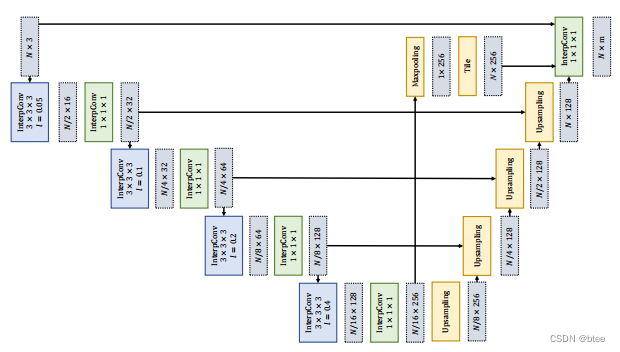
网络
分类网络(采用类似Inception网络模块方法)
分割网络
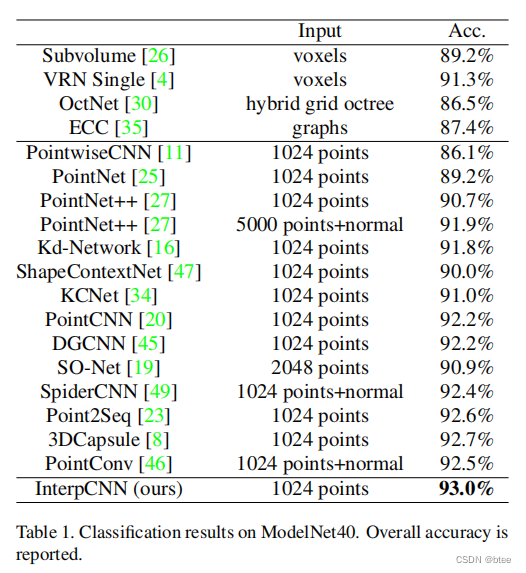
实验
分类效果
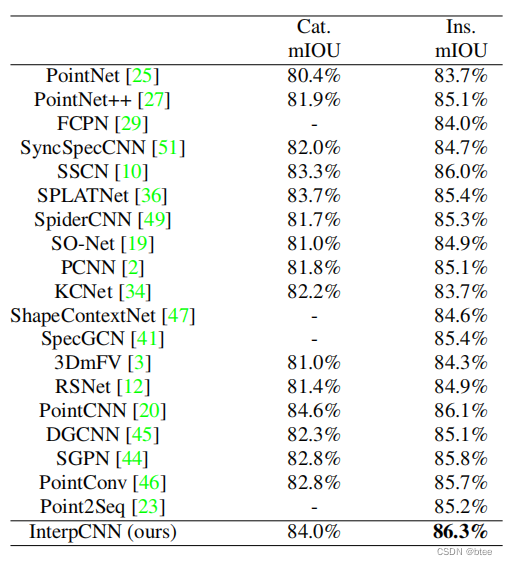
分割效果
总结
插值函数在点云邻域里用得比较多,有的是直接对规则卷积核插值,这篇文章是对特征插值再应用离散卷积






站长推荐
- U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结