您现在的位置是:首页 >技术交流 >【Matlab】基于偏格式动态线性化的无模型自适应控制网站首页技术交流
【Matlab】基于偏格式动态线性化的无模型自适应控制
例题来源:侯忠生教授的《无模型自适应控制:理论与应用》(2013年科学出版社)。
👉对应书本 4.3 单输入单输出系统(SISO)偏格式动态线性化(PFDL)的无模型自适应控制(MFAC)
上一篇博客介绍了基于紧格式动态线性化的无模型自适应控制。
【Matlab】基于紧格式动态线性化的无模型自适应控制
紧格式动态线性化(CFDL)与偏格式动态线性化(PFDL)的格式类似,但偏格式动态线性化(PFDL)多了一个控制变量,线性化长度由1变成L.
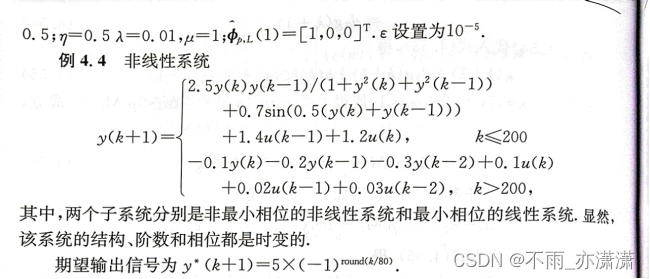
例题4.4
1.题目要求
在CFDL中,线性化长度常数 L=1,步长因子仅有1个(
ρ
ho
ρ),伪偏导数(PPD)
ϕ
c
phi_c
ϕc 是一个数,而在PFDL中,PPD
ϕ
p
,
L
phi_{p,L}
ϕp,L 是一个 L 维的向量。
2.matlab代码
clear all; clc;
%% 控制器参数
L=3; % 输入阶数
eta=0.5; % 伪偏导步长
miu=1; % 伪偏导权重
rho=0.5; % 控制律步长 rho1=rho2=rho3=0.5
lamda=0.01; % 控制律权重
epsilon=1e-5; % 伪偏导重置阈值
N=400; %采样时间
%% 初值
y(1:6)=0; y(4)=1;
u(1:5)=0;
du(1:5,1:L)=0;
%% 期望值
for k=1:N+1
yd(k)=5*(-1)^round(k/80);
end
figure(1)
plot(yd,'k');
hold on;
%% 控制器伪偏导数初值
% phi_{p,L}(k) = [phi_1(k), phi_2(k),...,phi_L(k)]^T
% phi(k,i):第1个参数是k(1~N),第2个参数是i(1~L)
phi(1:5,1)=1;
phi(1:5,2:L)=0;
for k=6:N
%% 伪偏导更新
% Delta{U_L(k)} = [Delta{u(k)}, Delta{u(k-1)},...,Delta{u(k-(L-1))}]^T
% du(k,i):第1个参数是k(1~N),第2个参数是i(1~L)
phi(k,1:L)=phi(k-1,1:L)+eta*(y(k)-y(k-1)-phi(k-1,1:L)*du(k-1,1:L)')*du(k-1,1:L)/(miu+du(k-1,1:L)*du(k-1,1:L)');
% 伪偏导重置
if abs(phi(k,1))<=epsilon | abs(du(k-1, 1:L))<= epsilon | sign(phi(k,1))~=sign(phi(1,1))
phi(k,1)=0.5;
end
%% 控制律更新
if L==1
u(k) = u(k-1)+rho*phi(k,1)*(yd(k+1)-y(k))/(lamda+phi(k,1).^2);
else
u(k) = u(k-1)+rho*phi(k,1)*(yd(k+1)-y(k)-phi(k,2:L)*du(k-1,1:L-1)')/(lamda+phi(k,1).^2);
end
%% 系统函数
if k<=200
y(k+1)=2.5*y(k)*y(k-1)/(1+y(k).^2+y(k-1).^2)+0.7*sin(0.5*(y(k)+y(k-1)))+1.4*u(k-1)+1.2*u(k);
else
y(k+1)=-0.1*y(k)-0.2*y(k-1)-0.3*y(k-2)+0.1*u(k)+0.02*u(k-1)+0.03*u(k-2);
end
for i=1:L
du(k,i)=u(k-i+1)-u(k-i);
end
error(k+1)=yd(k+1)-y(k+1);
end
%% 画图
figure(1)
plot(y,'--r');
xlim([0 400]); ylim([-15 15]);
xlabel('time'); ylabel('tracking performance');
legend('y*(k)', 'PFDL-MFAC');
title('PFDL-MFAC tracking performance');
figure(2)
plot(u,'b');
ylim([-60 60]);
xlabel('time'); ylabel('input');
title('PFDL-MFAC input');
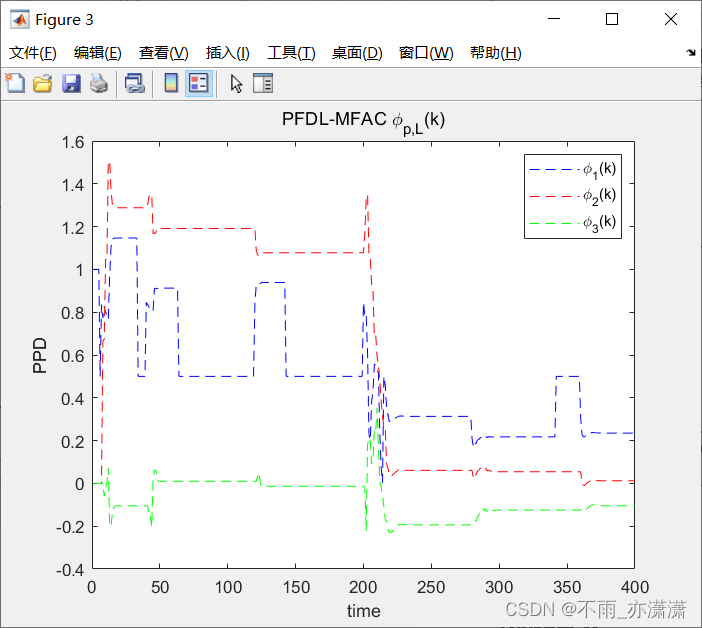
figure(3)
plot(phi(:,1),'b--');hold on;
plot(phi(:,2),'r--');hold on;
plot(phi(:,3),'g--');
xlabel('time'); ylabel('PPD');
legend('phi_1(k)','phi_2(k)','phi_3(k)');
title('PFDL-MFAC phi_{p,L}(k)');
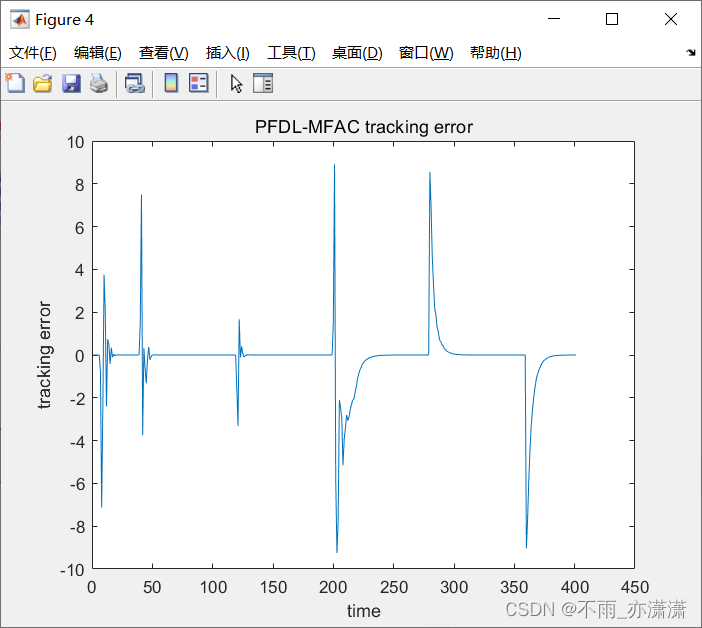
figure(4)
plot(error);
xlabel('time'); ylabel('tracking error');
title('PFDL-MFAC tracking error')
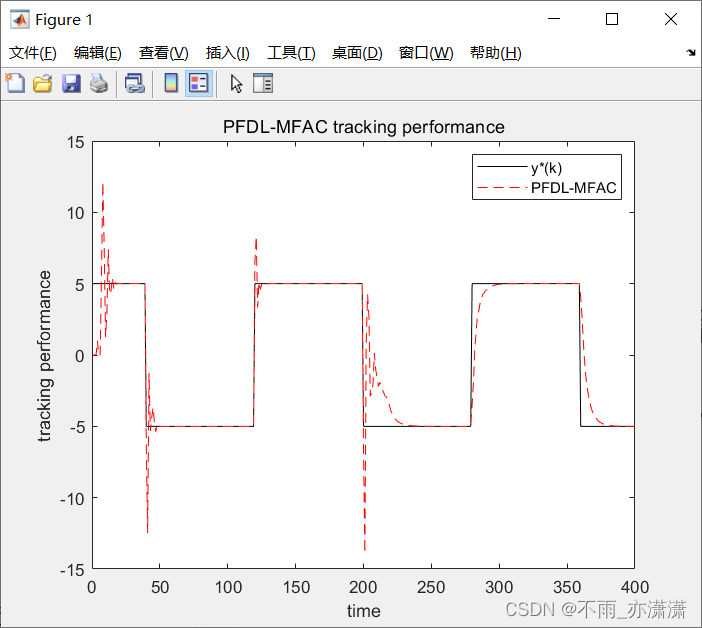
3.运行结果
跟踪性能
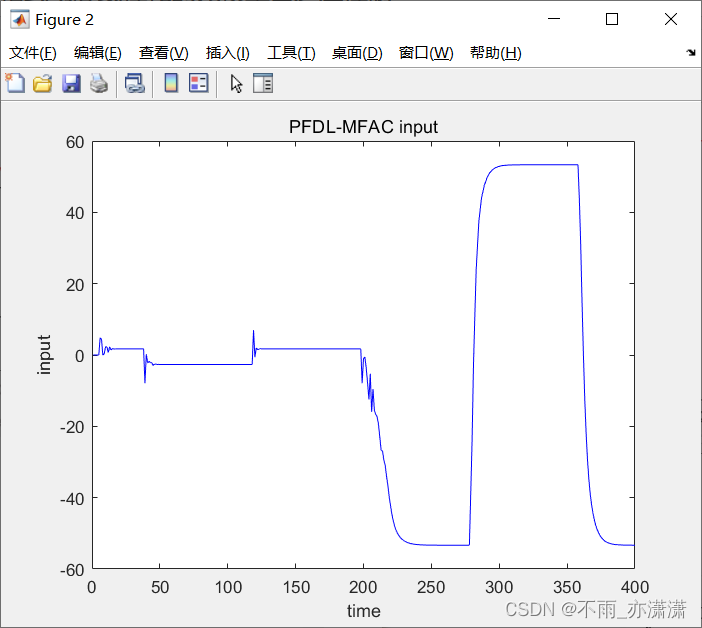
控制输入
PPD估计
跟踪误差
例题4.5
1.题目要求
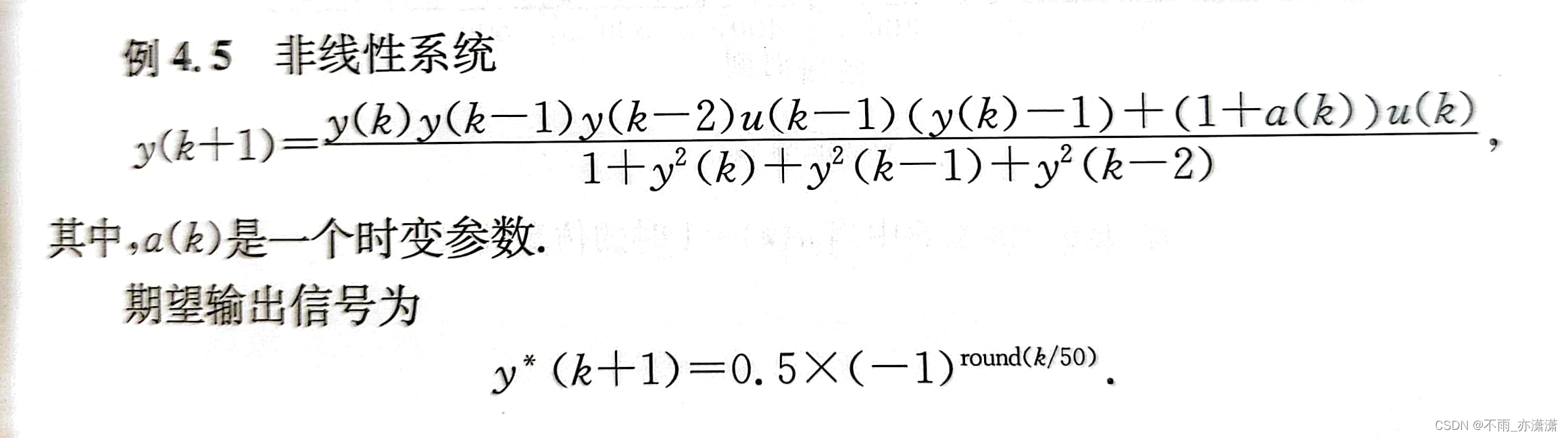
取 a(k)=1
2.matlab代码
clear all; clc;
%% 控制器参数
L=3; % 输入阶数
eta=0.5; % 伪偏导步长
miu=1; % 伪偏导权重
rho=0.5; % 控制律步长 rho1=rho2=rho3=0.5
lamda=0.01; % 控制律权重
epsilon=1e-5; % 伪偏导重置阈值
N=800; %采样时间
%% 初值
y(1:6)=0; y(4)=1;
u(1:5)=0;
du(1:5,1:L)=0;
%% 期望值
for k=1:N+1
yd(k)=0.5*(-1)^round(k/50);
end
figure(1)
plot(yd,'k');
hold on;
%% 控制器伪偏导数初值
% phi_{p,L}(k) = [phi_1(k), phi_2(k),...,phi_L(k)]^T
% phi(k,i):第1个参数是k(1~N),第2个参数是i(1~L)
phi(1:5,1)=1;
phi(1:5,2:L)=0;
for k=6:N
%% 伪偏导更新
% Delta{U_L(k)} = [Delta{u(k)}, Delta{u(k-1)},...,Delta{u(k-(L-1))}]^T
% du(k,i):第1个参数是k(1~N),第2个参数是i(1~L)
phi(k,1:L)=phi(k-1,1:L)+eta*(y(k)-y(k-1)-phi(k-1,1:L)*du(k-1,1:L)')*du(k-1,1:L)/(miu+du(k-1,1:L)*du(k-1,1:L)');
% 伪偏导重置
if abs(phi(k,1))<=epsilon | abs(du(k-1, 1:L))<= epsilon | sign(phi(k,1))~=sign(phi(1,1))
phi(k,1)=0.5;
end
%% 控制律更新
if L==1
u(k) = u(k-1)+rho*phi(k,1)*(yd(k+1)-y(k))/(lamda+phi(k,1).^2);
else
u(k) = u(k-1)+rho*phi(k,1)*(yd(k+1)-y(k)-phi(k,2:L)*du(k-1,1:L-1)')/(lamda+phi(k,1).^2);
end
%% 系统函数
y(k+1)=(y(k)*y(k-1)*y(k-2)*u(k-1)*(y(k)-1)+(1+1)*u(k)) / (1+y(k)^2+y(k-1)^2+y(k-2)^2);
for i=1:L
du(k,i)=u(k-i+1)-u(k-i);
end
error(k+1)=yd(k+1)-y(k+1);
end
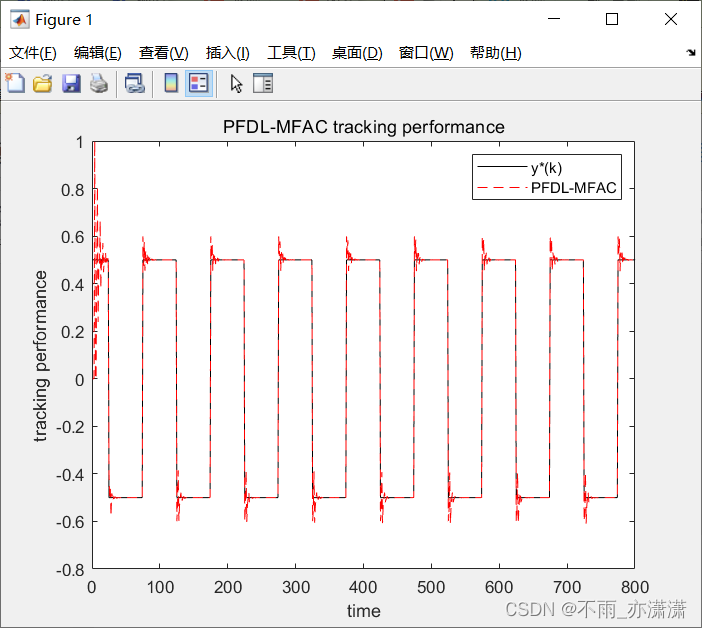
%% 画图
plot(y,'--r');
xlim([0 800]);
xlabel('time'); ylabel('tracking performance');
legend('y*(k)', 'PFDL-MFAC');
title('PFDL-MFAC tracking performance');
3.运行结果






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结