您现在的位置是:首页 >技术杂谈 >【Linux】进程信号网站首页技术杂谈
【Linux】进程信号
文章目录
1.信号概念理解
信号产生
什么叫做信号呢?
生活当中认为是信号的是:红绿灯 闹钟 下课铃 鸡叫 手势
1.当红灯亮的时候, 你会停下来 即匹配的动作
那为什么会有这个匹配动作呢?
因为曾经有人培养过你
所以信号没有被产生,也知道怎么该处理它
2.我们能够认识并处理一个信号,是能因为识别这个信号的
若进程就是我,信号就是一个数字,进程在没有接收信号的时候,它早就知道一个信号该如何处理了
程序员在设计进程的时候,早就已经设计了对信号的识别能力
3.因为信号可能随时产生,所以在信号产生前,我可能正在做优先级更高的事情,我可能不能立马处理信号
要在后续合适的时候进行处理
如:你点了一份外卖,因为你不确定外卖什么时候到,所以开了一把游戏,当外卖小哥给你打电话说外卖到了时,游戏还没打完,所以你跟外卖小哥说等一会,马上到,然后继续打游戏,直到游戏打完,才去取外卖
信号保存

在信号产生和信号处理之间,存在时间窗口,因为没办法直接处理,需要等待后续处理
在时间窗口期间,需要被保存起来
进程收到信号的时候,如果没有立马处理这个信号,需要进程具有记录信号的能力
信号的产生对于进程来讲是异步的
异步为两者互相做自己的事,互不干扰
如:你正在上课,外卖小哥给你打电话告诉你快递到了,因为快递有重要的东西,所以你不得不现在去取,但是在你取快递的过程中,依旧在上课,上课与你取快递两件事情互不干扰
进程该如何记录对应产生的信号?记录在哪里?
可能同时收到很多信号,已经被产生但尚未处理,所以需要在时间窗口内,将这些信号保存,同时也应该将其进行管理
而管理的本质是先描述,在组织
那如何描述一个信号呢? 用什么数据结构管理这个信号呢?
输入 kill -l 查看信号列表
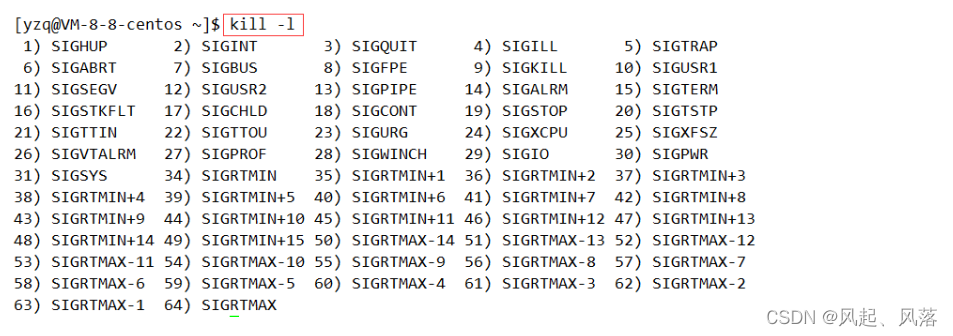
可以发现在31 和34之间没有信号存在,说明信号被划分为两部分,1-31以及34-64
34-64称之为实时信号,
1-31称之为普通信号,是目前要学习的信号
数字实际上是真正的信号,而大写的名称是宏
实时操作系统
当前主流的操作系统分为实时和分时,
分时像Linux、windows操作系统,基于时间片操作器调度的,强调的是公平调度
实时 像汽车的车载系统的辅助驾驶
特点为若来一个任务,就必须优先级较高的将该任务立马处理,强调的是高响应
普通信号 ,只保存有无产生,只需在合适的时候处理信号即可
可以通过0代表没有产生,1代表产生
1-31刚好是32个比特位,所以使用位图结构管理信号
而进程使用task_struct(PCB) 内部必定要存在一个位图结构,用int表示

从低到高的比特位,依次对应1-31 信号
发送信号的本质是写入信号,直接修改特定进程的信号位图中的特定比特位,0变成1即可
比特位的位置,称之为信号的编号
比特位的内容,表示是否收到该信号
信号处理
默认处理信号的方式:
1.默认动作
2.忽略信号
3.用户自定义动作
如:拿到快递,共有三种选择
1.执行默认动作把快递打开 2.忽略快递 3. 执行自定义动作(如快递内是零食,送给你的女朋友)
2. 信号的产生
在vscode中,创建makefile文件
mysignal:mysignal.cc
g++ -o $@ $^
.PHONY:clean
clean:
rm -f mysignal
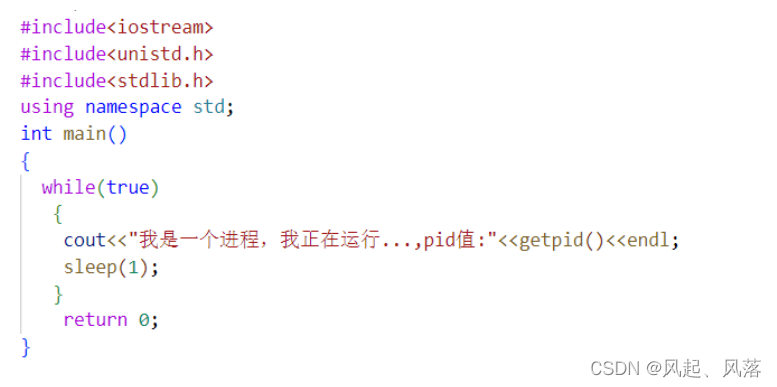
创建 mysignal.cc(以cc结尾是cpp) 文件
会一直循环打印一句话,并当前进程的包含pid值
#include<iostream>
#include<unistd.h>
using namespace std;
int main()
{
while(true)
{
cout<<"我是一个进程,我正在运行...,pid值:"<<getpid()<<endl;
sleep(1);
}
return 0;
}
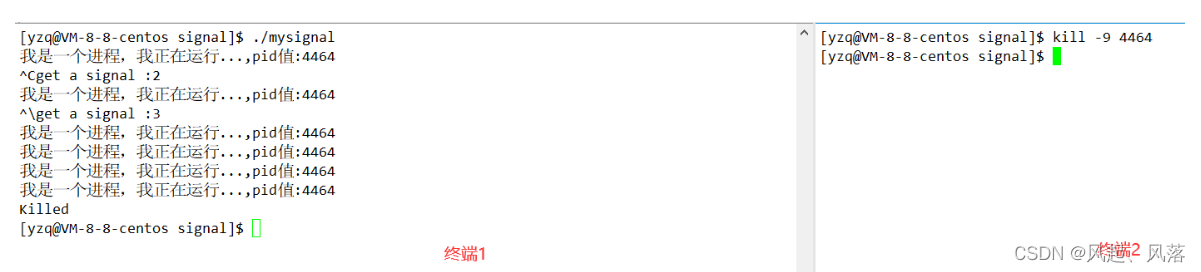
复制SSH渠道创建终端2,在保证运行终端1的可执行程序的情况下,
在终端2中输入 kill -9 +pid值 ,终止了终端1中运行的程序
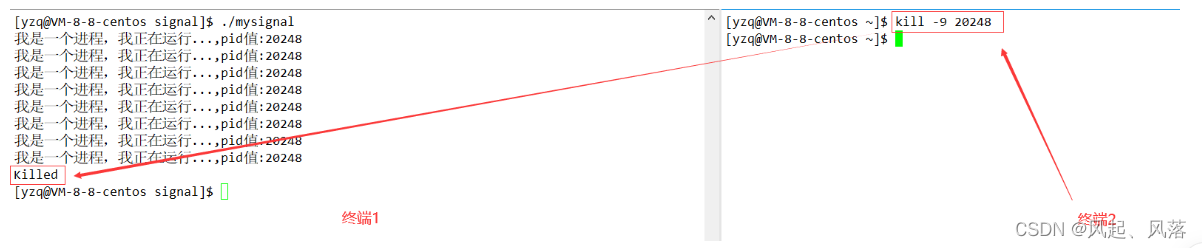

实际上 在键盘中输入 CTRL C ,终止运行程序,本质也是向对前台进程发送信号
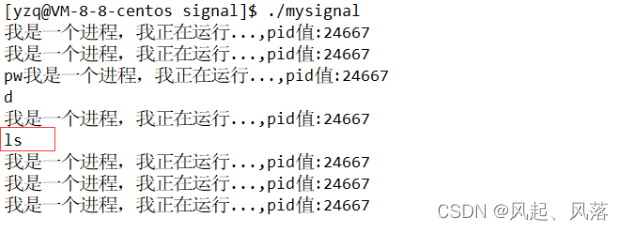
Linux通过远程终端访问时,只允许一个进程处于前台,默认情况是bash,
所以在自己的程序运行时输入指令没有任何反应
证明输入 CTRL C 就是向前台进程发送信号
输入 man 2 signal 指令

第二个是一个函数指针 将 void(*) (int) typedef 命名为 sighandler_t
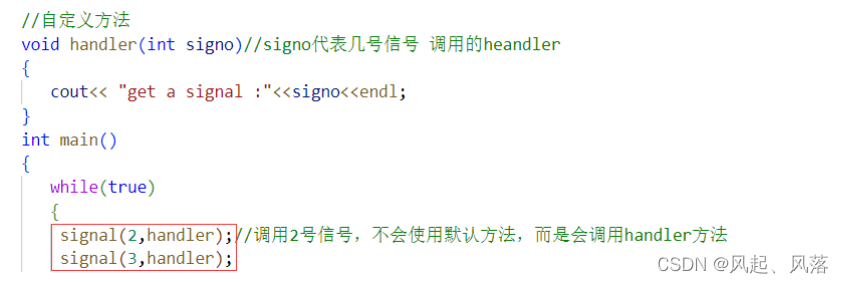
signal 函数的第一个参数 是 signsum 代表信号编号
第二个参数 是 handler 代表哪一个进程调用了signal,使指定信号不在执行默认动作,而是执行该函数指针指向的方法
输入 CTRL C 相当于发送 2号信号
修改 mysignal.cc文件内容,并运行程序 发现输入 CTRL C 指令无法结束程序
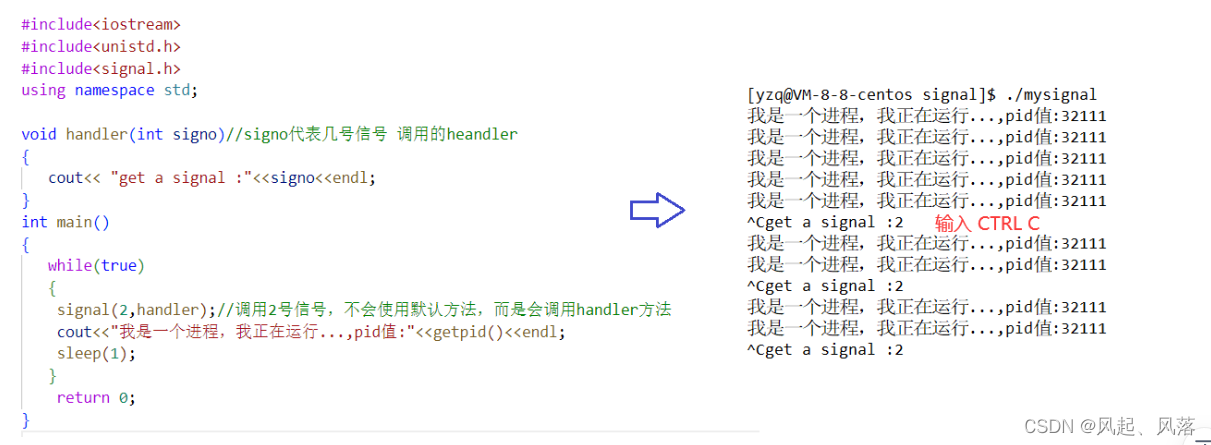
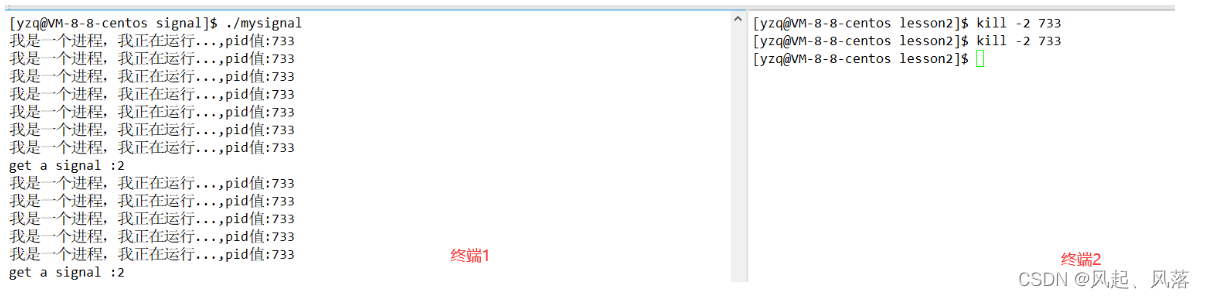
同样在终端2中输入 kill -2 pid值,也无法结束运行程序
说明对于2号信号 ,进程的默认方法是终止进程
signal 可以进行对指定动作的信号设定自定义处理动作
signal 函数内部参数传递的理解
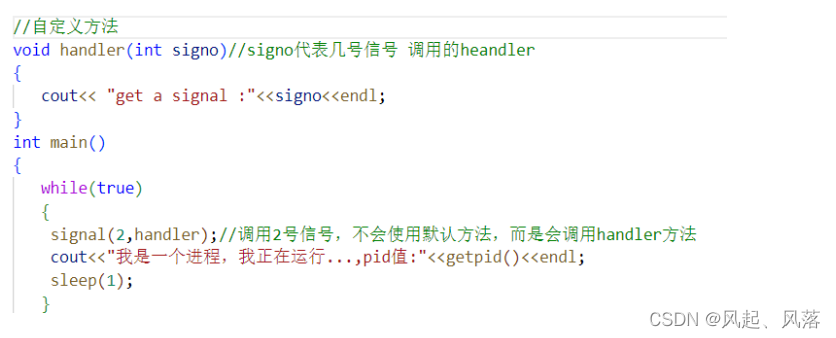
当signal(2,handler)调用完这个函数时, handler方法没有被调用,只是发生了回调
handler作为函数的地址传过去 作为参数被函数指针接收,再通过函数指针找到handler函数 完成调用
在操作系统内部,把对应的自定义方法的地址保存起来了
handler方法什么时候被调用?
当2号信号产生的时候
如: 你小时候总喜欢在家里调皮,你老爸不管你,认为这是很正常的事情,所以你认为这是默认动作,但是你的老妈看见你调皮,就告诉你说如果下次再看见你调皮,就揍你,
所以再有调皮捣蛋事情发生,不会像你老爸那样什么都不管,你老妈会揍你
是在下次调皮发生的时候,才揍你
对于信号自定义动作的捕捉问题
默认对2号信号的处理动作:终止进程
输入 man 7 signal 指令
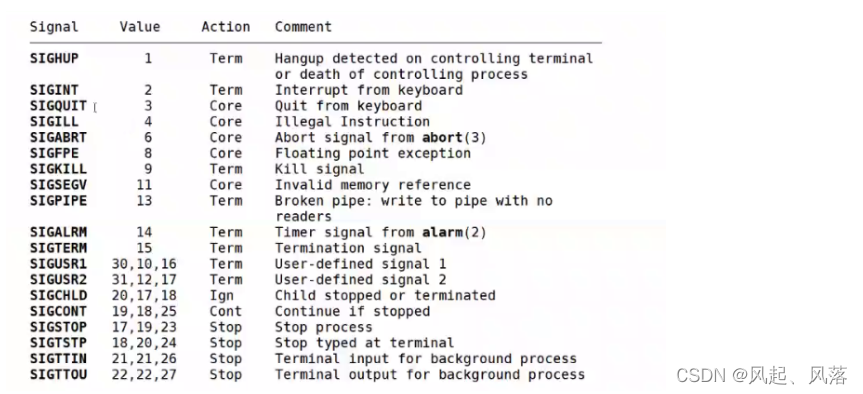
2号信号的动作是 Term(终止)
用signal(2,handler),是在执行用户动作的自定义捕捉
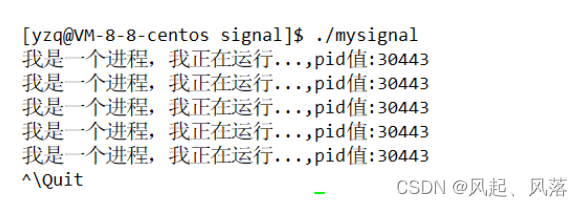
CTRL 代表3号信号 ,此时虽然2号信号被置为自定义动作了,但是三号信号还没有,所以依旧能终止进程
修改mysignal.cc文件内容,加入对于3号信号的自定义动作


再次运行可执行程序时,发现使用CTRL 也会调用自定义动作
可以给所有信号设置同一个处理函数
若修改mysignal.cc文件内容,将1-31的所有普通信号都进行自定义动作捕捉

可当运行可执行程序时,在终端2中使用 kill -9 pid值 方式依旧可以干掉进程
9号信号被称为管理员信号,不可被自定义,只能执行默认动作
3.信号产生的方式
1.从键盘输入
在输入的时候,计算机怎么知道从键盘输入数据了呢?
键盘是通过硬件中断的方式,通知系统键盘已经按下了
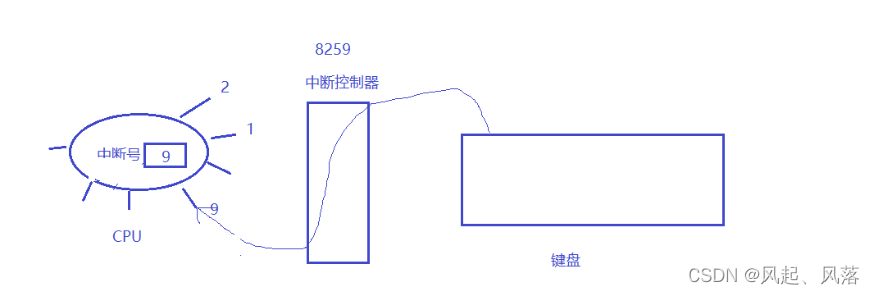
CPU存在很多针脚,有自己的编号,接到主板上
键盘是通过中断控制器(如8259)连接到CPU的,
当按键盘中的某个位置时,操作系统要知道是哪个设备按下的(磁盘 键盘 网卡)
键盘通过中断控制器链接到9号阵脚处,触发中断
而从这个阵脚的数字被叫做 中断号
CPU内部有各种寄存器,当阵脚有数字时已经就绪时,向CPU寄存器的内部写数字
就完成了硬件中断
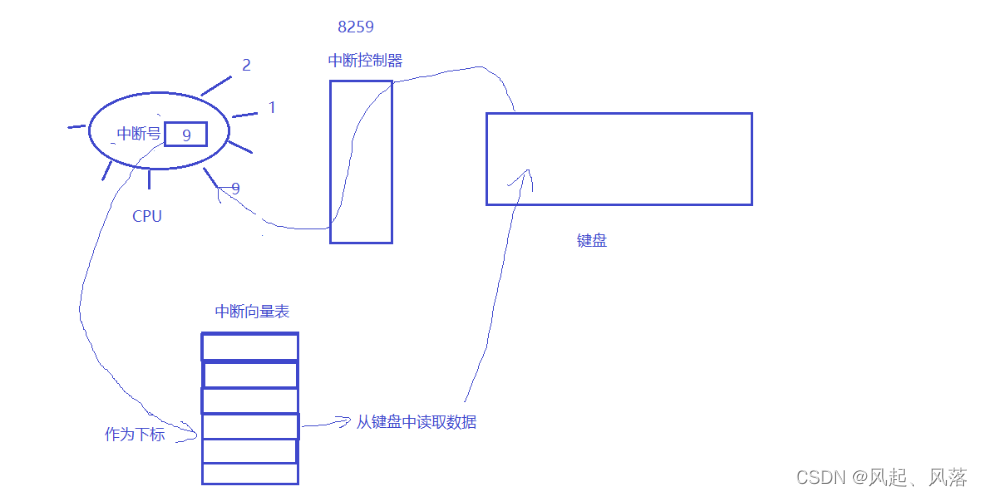
操作系统内维护一张中断向量表
中断向量表内部包含函数指针
中断号作为中断向量表的下标,直接调用中断向量表中对应的方法
而这个方法会从键盘中读取数据
2.使用系统调用向进程发送信号
kill
输入 man 2 kill 指令
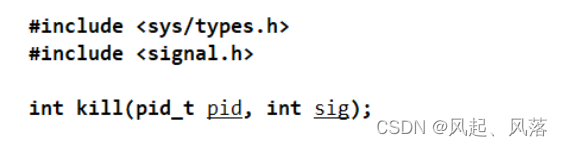
第一个参数为目标进程
第二个参数为信号
向目标进程(pid)发送对应的信号(sig)
成功返回0,失败返回-1
命令行参数
main函数的两个参数,char* argv[] 为指针数组 ,argv为一张表,包含一个个指针,指针指向字符串
int argc,argc为数组的元素个数
创建mykill.cc文件
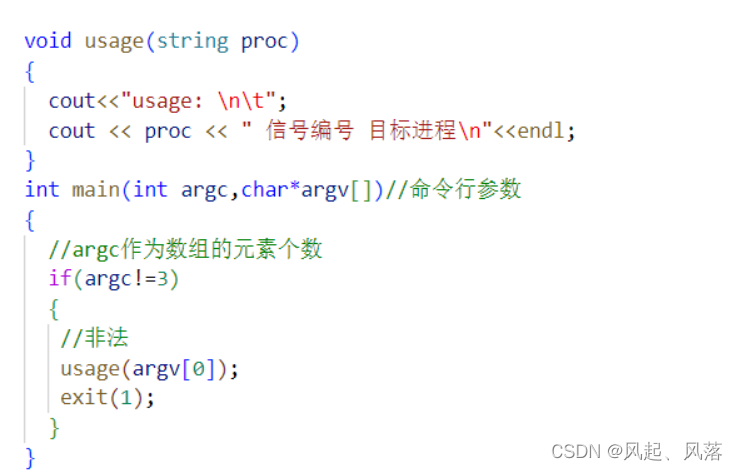

当输入./mykill时,由于有命令行参数的存在,将其放入数组下标为0的位置中,同时数组个数为0
所以进入自定义的用户手册
修改mykill.cc文件内容
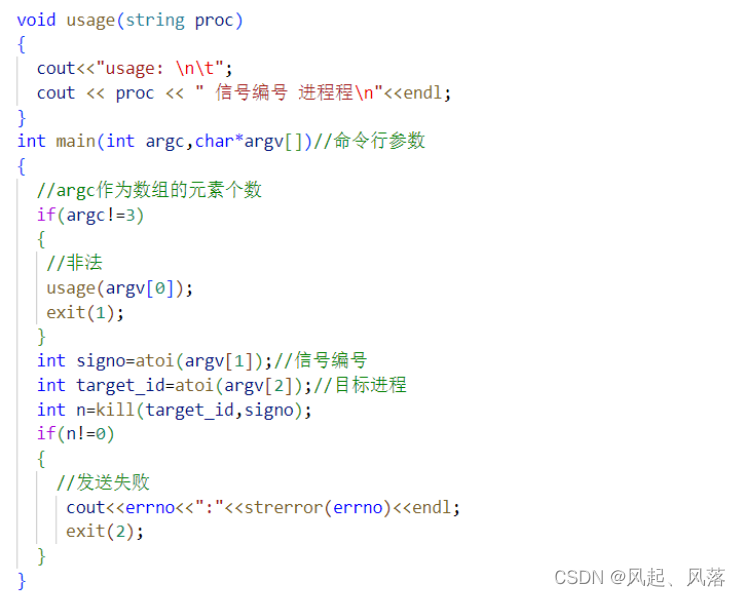
c由于agrv是字符指针数组,而我们想要的目标进程和信号编号都是数字,所以需要使用atoi函数,将字符串转化为整数
创建loop.cc文件
运行loop.cc与mykill.cc文件,形成可执行程序

在终端1中运行loop
在终端2中运行输入 ./mykill 9 对应进程的pid值
9为进程编号 pid值为目标进程
输入loop进程的pid值,从而使用9号信号结束loop进程
raise
输入 man raise 指令

谁调用raise,就给谁发指定的信号
修改mykill.cc文件内容


再去调用可执行程序mykill时,自己就结束了,因为自己给自己发送2号信号
abort
输入 man abort 指令
给自己发信号
再次修改mykill.cc文件内容
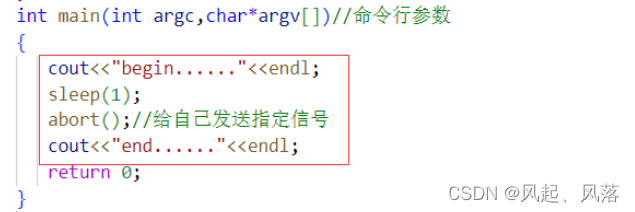
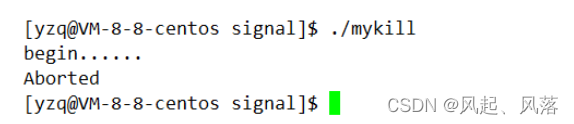
没有end存在,说明当前进程自己把自己干掉了
通过添加signal的方式,若运行mykill,自动生成get a signal :6
说明使用 Aborted时使用6号信号
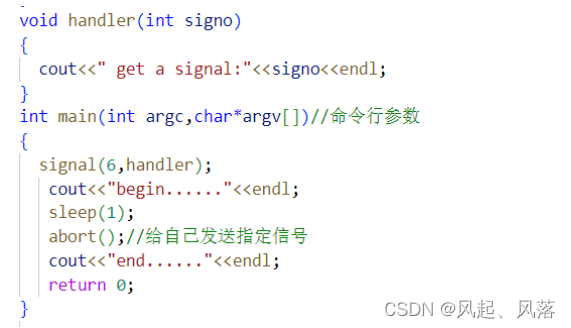

而在实际运行时,会自动生成get a signal :6 ,说明实际上Aborted是使用6号信号
3.由软件条件产生信号
alarm函数可以设定一个未来时间
如:alarm(5) alarm函数调用完了,5秒后给当前进程发送SIGALRM(14)信号,该信号的默认动作是终止当前进程
alarm函数返回值是0或者以前设定的时间还余下的秒数
假设你想睡一觉,设定闹钟30分钟后响,但是在20分钟后你被吵醒了,你又重新设置闹钟15分钟后响
此时返回值就是上一次余下的10分钟
修改mykill.cc文件内容
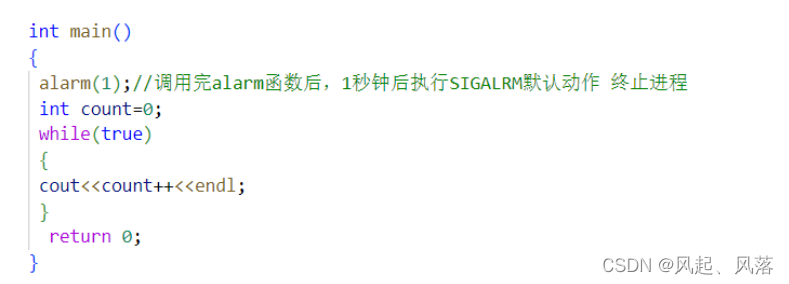
计算1S中计算机会将整数累计到多少
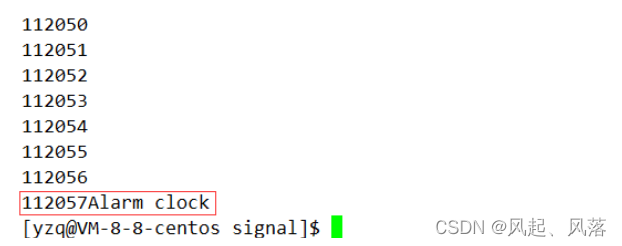
在这次计算中,count只有11万多,非常不符合我们的预期
因为要打印到显示器上,以及网络问题,非常拖延速度

修改count为全局变量,在发送信号时,自定义方法中输出count值

这时count的值就变成5亿多
两者相比之下,说明IO效率非常底下






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结