您现在的位置是:首页 >技术教程 >vscode python3.6配置pcl点云库 obj3d模型转pcd点云图网站首页技术教程
vscode python3.6配置pcl点云库 obj3d模型转pcd点云图
简介vscode python3.6配置pcl点云库 obj3d模型转pcd点云图
配置vscode python3.6的环境我就跳过了,网上都有
1.下载PCL1.9
github:pcl-1.9.1
百度云:PCL-1.9.1-AllInOne-msvc2017-win64提取码adcx
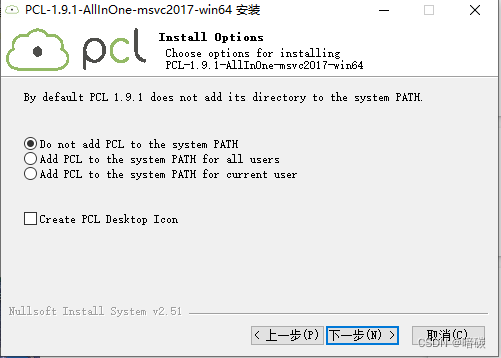
2.安装硬盘任意位置,我是E盘,在安装过程中会弹出openni的安装提示,将它安装路径选择在E:PCL 1.9.13rdPartyOpenNI2,等待安装完成
3.pip先安装这两个库
pip install cython
pip install numpy
然后下载python_pcl-0.3-cp36-cp36m-win_amd64,cd到下载目录,用pip进行安装
pip install python_pcl-0.3-cp36-cp36m-win_amd64
百度云:python_pcl-0.3-cp36-cp36m-win_amd64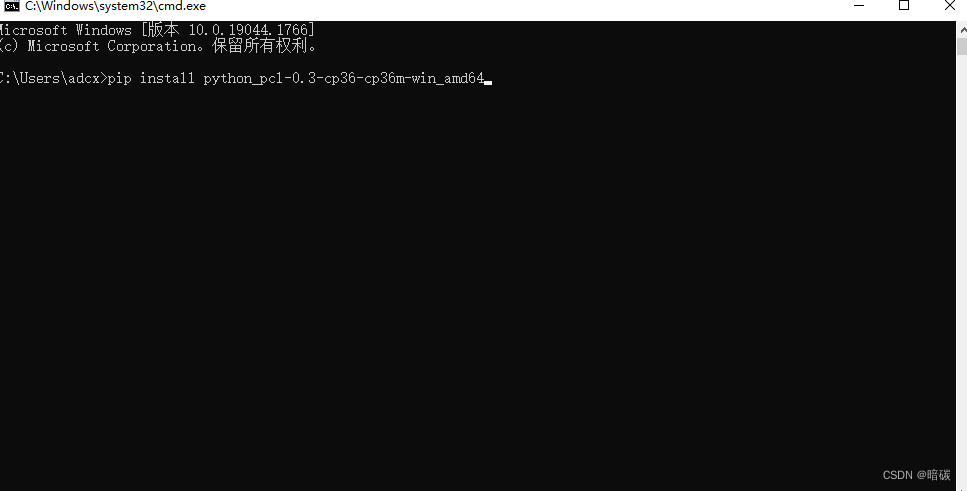
4.配置系统环境
此电脑-属性-高级系统设置-环境变量-系统变量 找到Path,添加以下路径
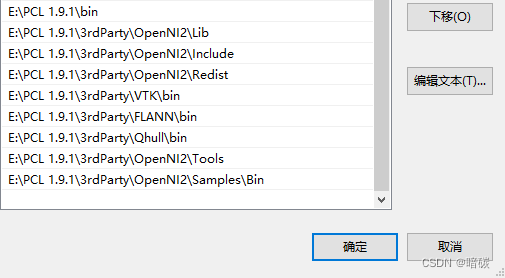
配置完成
打开vscode测试,用以下文件测试
anbo.pcd
import numpy as np
import pcl
import pcl.pcl_visualization
def main():
# 加载点云数据
cloud = pcl.load('E:\anbo.pcd')
# 将数据居中
centred = cloud - np.mean(cloud, 0)
# 将居中后的点云数据转换为pcl格式
ptcloud_centred = pcl.PointCloud()
ptcloud_centred.from_array(centred)
# 创建CloudViewing对象
visual = pcl.pcl_visualization.CloudViewing()
# 显示点云
visual.ShowMonochromeCloud(ptcloud_centred, b'cloud')
v = True
# 检查是否停止显示
while v:
v = not(visual.WasStopped())
if __name__ == "__main__":
# 主函数
main()
输出

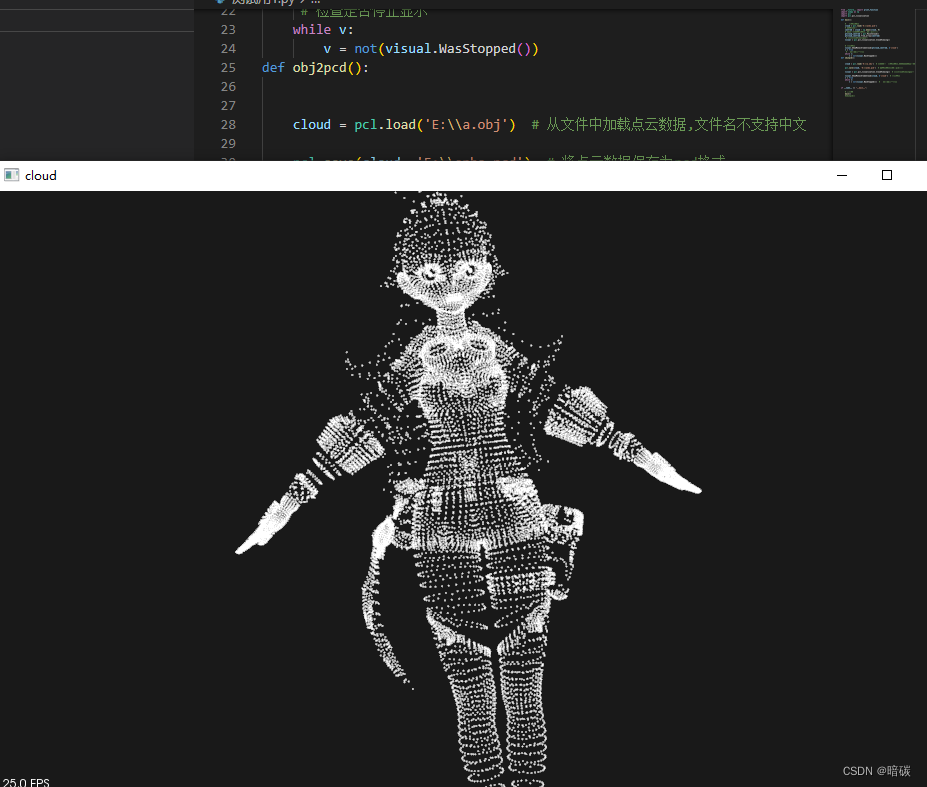
obj模型转bcd
def obj2pcd():
cloud = pcl.load('E:\anbo.obj') # 从文件中加载点云数据,文件名不支持中文
pcl.save(cloud, 'E:\anbo.pcd') # 将点云数据保存为pcd格式
visual = pcl.pcl_visualization.CloudViewing() # 创建CloudViewing对象
visual.ShowMonochromeCloud(cloud, b'cloud') # 显示点云
v = True
while v:
v = not(visual.WasStopped()) # 检查是否停止显示
报错解决办法
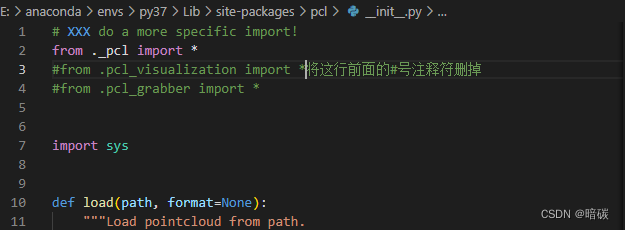
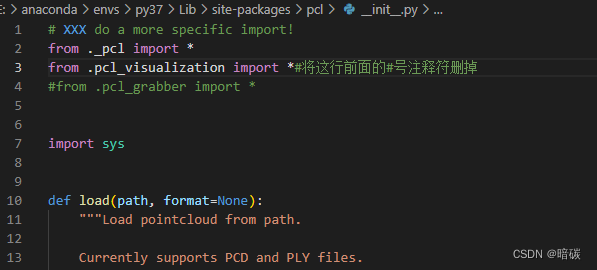
1.报错AttributeError: module ‘pcl’ has no attribute ‘pcl_visualization’
打开pcl包_init_.py文件,删掉from .pcl_visualization import *前面的注释符
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结