您现在的位置是:首页 >学无止境 >STM32平衡小车 TB6612电机驱动学习网站首页学无止境
STM32平衡小车 TB6612电机驱动学习
简介STM32平衡小车 TB6612电机驱动学习
TB6612FNG简介
单片机引脚的电流一般只有几十个毫安,无法驱动电机,因此一般是通过单片机控制电机驱动芯片进而控制电机。TB6612是比较常用的电机驱动芯片之一。
TB6612FNG可以同时控制两个电机,工作电流1.2A,最大电流3.2A。
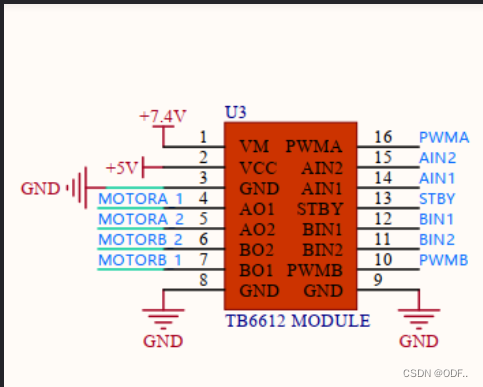
- VM电机电源正极,是驱动电压输入端(<10V),
- VCC为逻辑电平输入端(2.7V~5.5V)。
- PWMA/PWMB为两个电机提供pwm脉冲,也就是控制电机的速度。
- AIN1/AIN2,BIN1/BIN2.控制电机的正反转和停止
只需改变AIN1、AIN2、BIN1、BIN2的高低电平就可实现电机的正反转。

- STBY可以理解为一个使能端口,高电平有效。
- AO1和AO2是电机A的输入电压,也就是这两个口接电机的正负极
- BO1和BO2是电机A的输入电压,也就是这两个口接电机的正负极
工程创建:
这里我只驱动一个电机,先设置一下正反转的控制引脚。
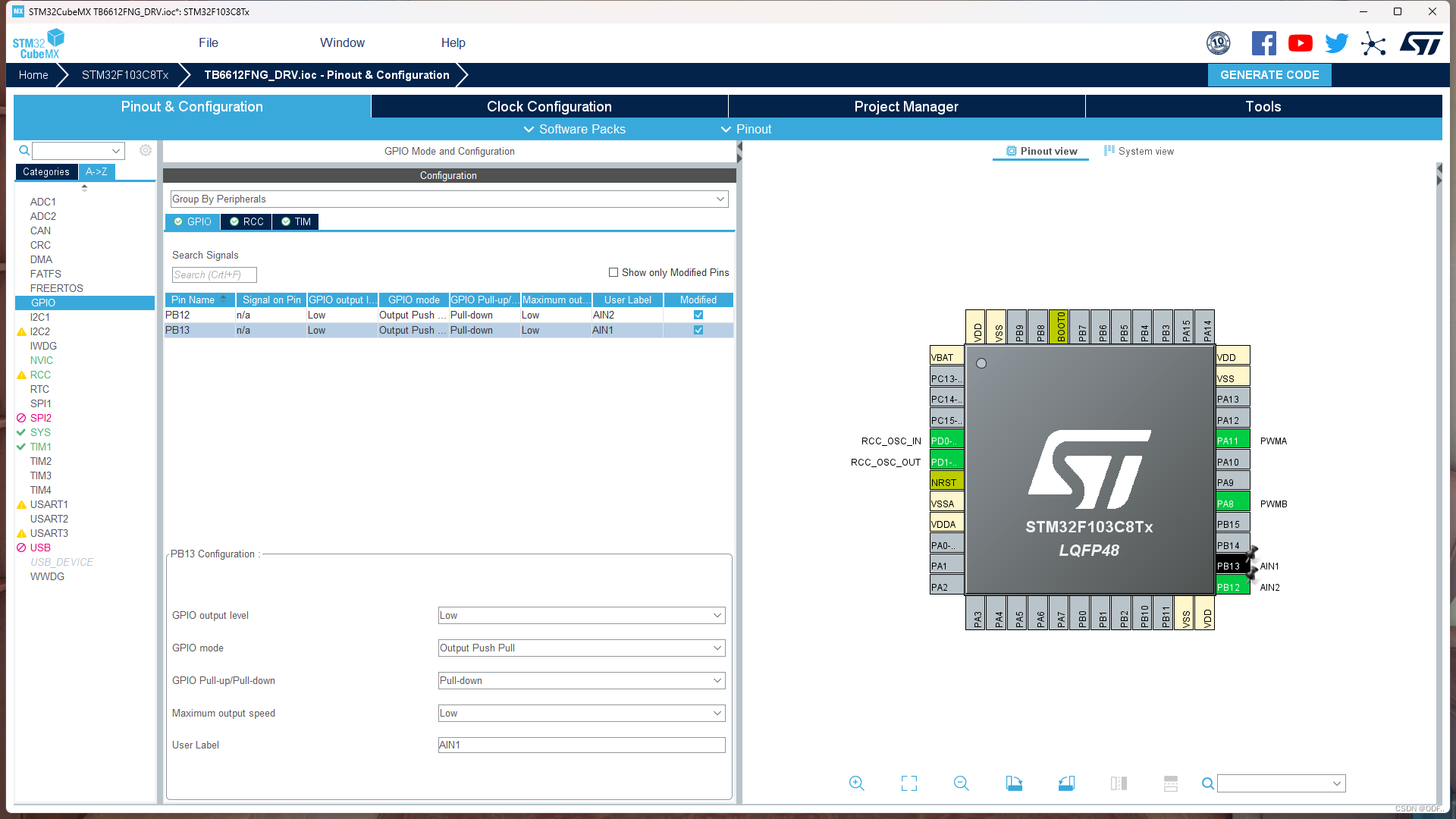
然后用定时器1来输出两路的PWM(其实只需要用到一路,不过下意识设置了两个,懒得改了)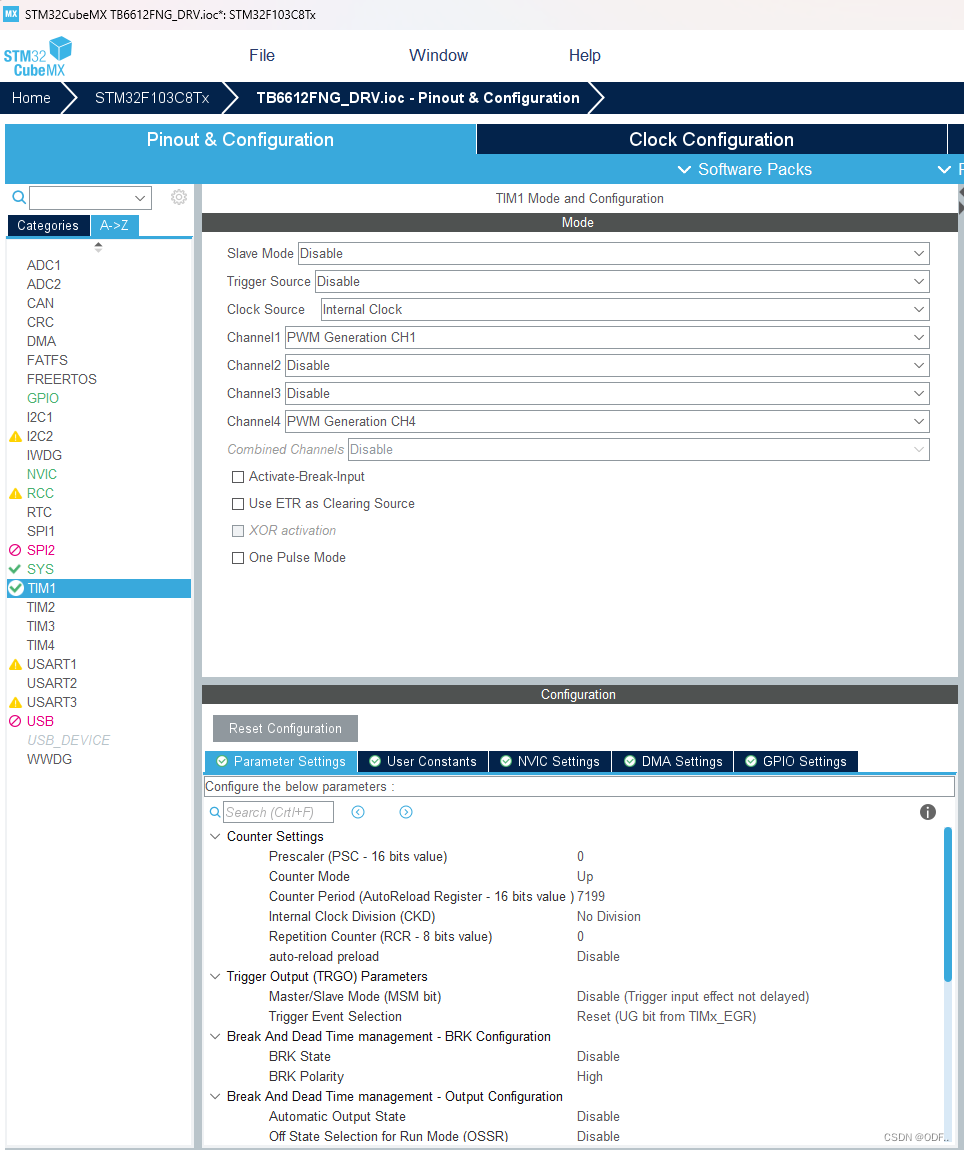
PWMA配置
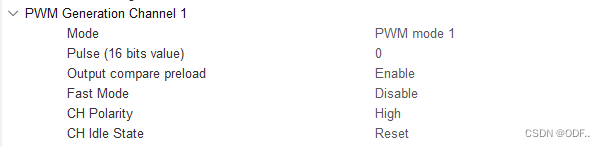
PWMB配置
配置下中断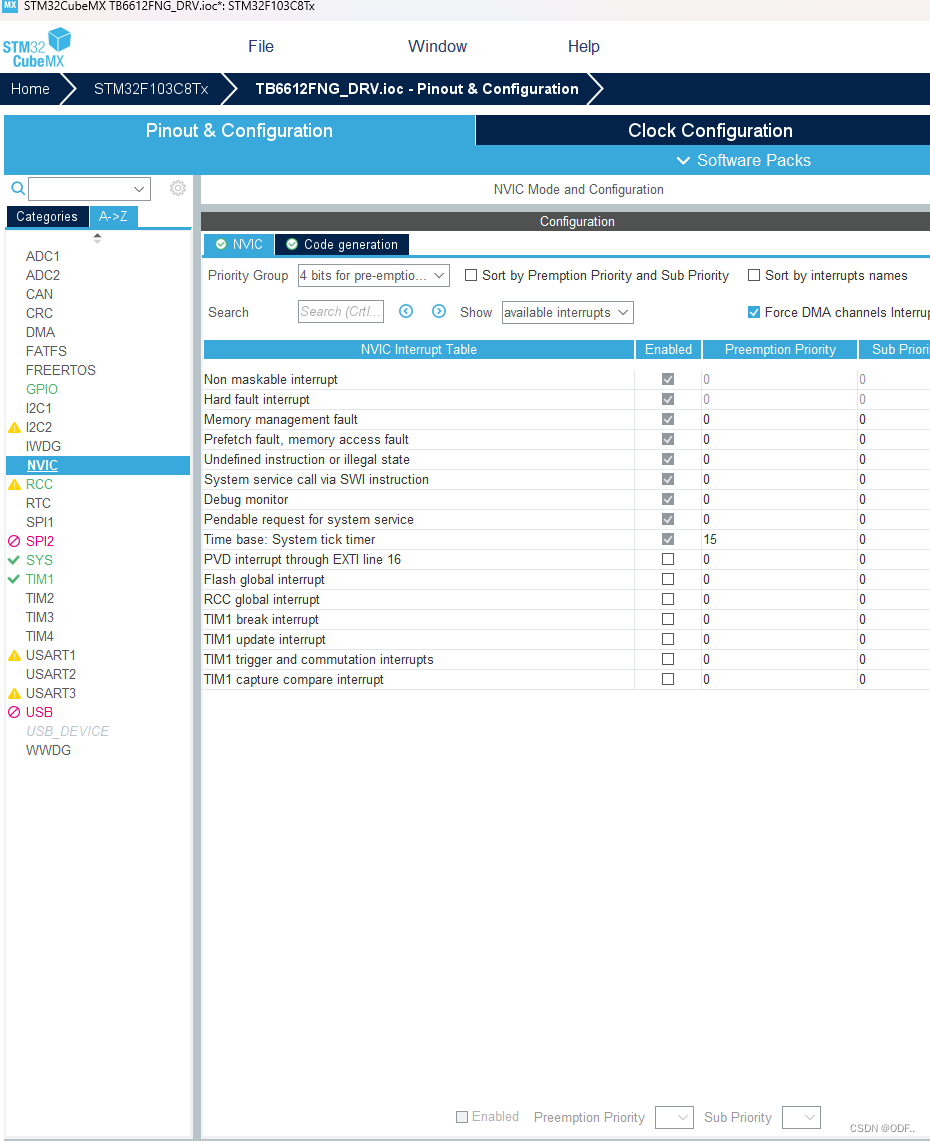
工程代码
在主函数初始化
//打开定时器
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4);
//设置AIN1 和AIN2 让电机A反转
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);在循环里面,不断改变占空去看电机效果
HAL_GPIO_WritePin(AIN1_GPIO_Port,AIN1_Pin,GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port,AIN2_Pin,GPIO_PIN_SET);
for(int i=0;i<7100;i++)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,i);
HAL_Delay(1);
}
for(int j=7100;j>0;j--)
{
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,j);
HAL_Delay(1);
}风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结