您现在的位置是:首页 >技术交流 >基于STM32F103的PWM电机驱动A4950网站首页技术交流
基于STM32F103的PWM电机驱动A4950
简介基于STM32F103的PWM电机驱动A4950
1.基本介绍

A4950的峰值输出电流可达±3.5 A,工作电压为7.6~40v。
优点:相对于L298N模块控制2个电机正反转仅需要4个I/O口,体积小,发热低。
缺点:需要2个PWM引脚才能控制正反转,所以控制2个电机需要4PWM引脚,会使用STM32F103芯片一个定时器的全部PWM通道。
A4950模块是靠输入2路的PWM占空比的差值,来设定输出电压的大小,当差值为0时输出为0,反之当占空比差值为100时输出最大。
2.引脚功能和接线
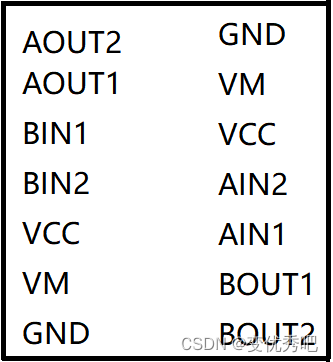
| 引脚名称 | 输入输出 | 接线 | 功能 |
| AOUT1 | 输出 | 接A电机正 | 输出电压控制电机 |
| AOUT2 | 输出 | 接A电机负 | 输出电压控制电机 |
| BOUT1 | 输出 | 接B电机正 | 输出电压控制电机 |
| BOUT2 | 输出 | 接B电机负 | 输出电压控制电机 |
| AIN1 | 输入 | 接STM32 A7 | 控制电机输出电压 |
| AIN2 | 输入 | 接STM32 B1 | 控制电机输出电压 |
| BIN1 | 输入 | 接STM32 A6 | 控制电机输出电压 |
| BIN2 | 输入 | 接STM32 B0 | 控制电机输出电压 |
| VCC | 输入 | 接12V电源 | 总电源 |
| VM | 输入 | 接5V电源 | 给内部逻辑电路供电 |
| GND | 输出 | 接电源地 | 接地 |
3程序设计
接下来我使用STM32F103C8T6的标准库代码为例
定时器3初始化代码
#include "stm32f10x.h" // Device header
void PWM_Init3(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure1;
GPIO_InitStructure1.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure1.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStructure1.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure1);
GPIO_InitTypeDef GPIO_InitStructure2;
GPIO_InitStructure2.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure2.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure2.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure2);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100-1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 3600-1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;//CCR
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3,ENABLE);
}
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1 (TIM3,Compare);
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2 (TIM3,Compare);
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3 (TIM3,Compare);
}
void PWM_SetCompare4(uint16_t Compare)
{
TIM_SetCompare4 (TIM3,Compare);
}
电机控制函数
#include "stm32f10x.h" // Device header
#include "PWN.h"
void Motor_Init(void)
{
PWM_Init3();
}
// you
void Motor_SetSpeed2(int16_t Speed)
{
PWM_SetCompare3(50-Speed/2);
PWM_SetCompare1(50+Speed/2);
}
//zuo
void Motor_SetSpeed1(int16_t Speed)
{
PWM_SetCompare2(50-Speed/2);
PWM_SetCompare4(50+Speed/2);
}
mian函数代码
#include "stm32f10x.h" // Device header
#include "Motor.h"
int main (void)
{
Motor_Init(); //电机驱动初始化
while(1)
{
Motor_SetSpeed1(20);//给电机1 向前20速度
Motor_SetSpeed2(20);//给电机2 向前20速度
}
}
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结