您现在的位置是:首页 >其他 >Stereo-Detection:适合新手的双目测距开源项目网站首页其他
Stereo-Detection:适合新手的双目测距开源项目
简介Stereo-Detection:适合新手的双目测距开源项目
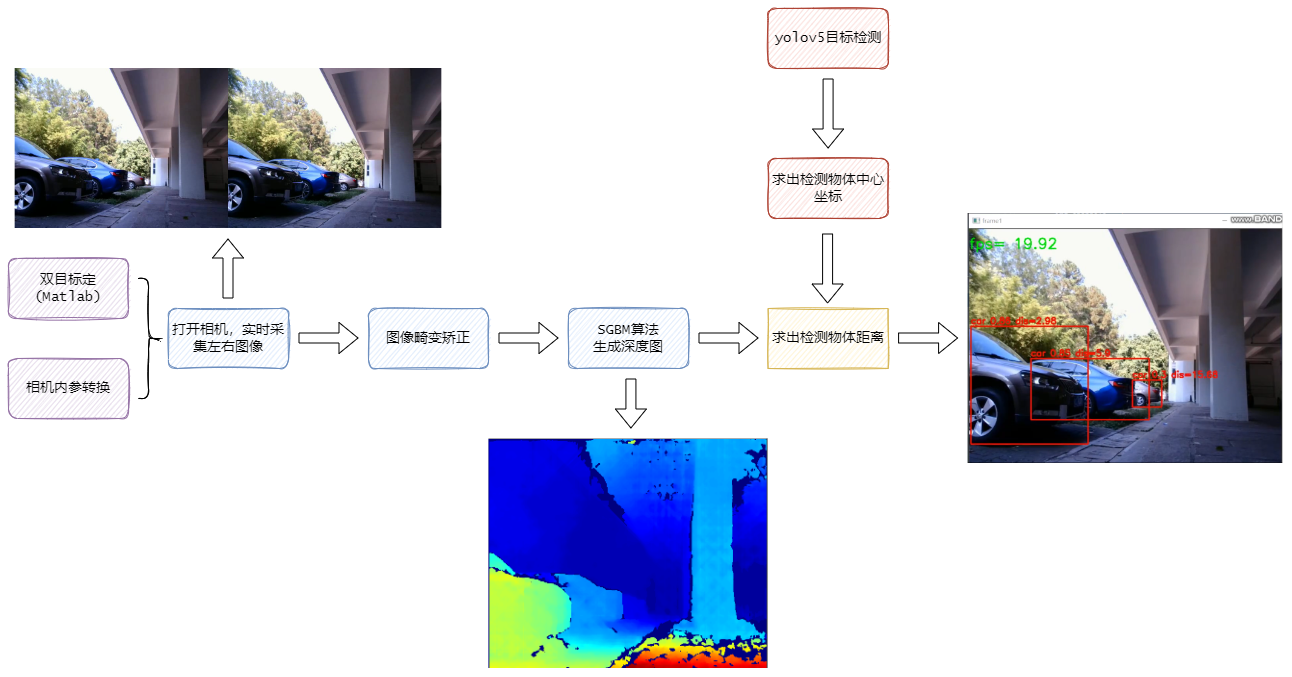
简介:Stereo-Detection 是一个传统的SGBM深度测距+yolov5目标检测,并部署在Jeston nano的开源教程。它致力于让更多的大四学生毕业,以及让研一学生入门
项目日志
- 双目相机的标定和初始化(2022.7.3)
- 运行BM、SGBM算法(2022.7.6)
- 研究SGBM算法并得出良好的open3d模型(2022.7.15)
- 实现双目测距(2022.7.27)
- 双目相机测出Yolov5检测物体的距离(2022.7.29)
- 视频帧率提高至6FPS(2022.7.30)
- 使用C++重勾BM算法(2022.8.1)
- 使用C++重构SGBM算法(2022.8.1)
- 使用TensorRT、C++部署yolov5模型(2022.8.3)
- 完成项目,帧率至少达到20FPS(2022.8.3)
- 新增
Jeston nano部署文件
环境说明
- 🔥Tensorrt 8.4
- 🚀Cuda 11.6.1 Cudnn 8.4.1
- Opencv 4.5.1
- Cmake 3.23.3
- Visual Studio 2017
- MX350,Windows10
文件说明
-
💼BM、SGBM算法均有C++和Python两个版本
-
📂tensorrt:模型部署文件,帧率为23fps
-
📁yolov5-v6.1-pytorch-master:未部署前的python代码文件,帧率为5fps
-
stereo_introduce:双目摄像头基本资料
-
📒双目视觉资料:从双目相机的标定(Matlab)到sgbm生成深度图的图文教程
-
stereo_shot.py:摄像头拍摄代码
-
🎁Jeston nano_tensorrt:Jeston nano(Linux)部署资料
参考资料
- 🍔YOLOv5 Tensorrt Python/C++部署:YOLOv5 Tensorrt Python/C++部署_哔哩哔哩_bilibili
- 🍞Pytorch 搭建自己的YoloV5目标检测平台Bubbliiiing:Pytorch 搭建自己的YoloV5目标检测平台(Bubbliiiing 源码详解 训练 预测)-YoloV5整体结构介绍_哔哩哔哩_bilibili
- CUDA的正确安装/升级/重装/使用方式:CUDA的正确安装/升级/重装/使用方式 - 知乎 (zhihu.com)
- 报错【Could not locate zlibwapi.dll. Please make sure it is in your library path】:Could not locate zlibwapi.dll. Please make sure it is in your library path_一休哥※的博客-CSDN博客
- 🍿windows下 C++ openCV配置及x86编译(傻瓜式教程):windows下 C++ openCV配置及x86编译(傻瓜式教程)_opencv x86_痕忆丶的博客-CSDN博客
- 树莓派开机自启动:树莓派开机自启动opencv程序脚本及报错分析_can’t initialize gtk backend in function 'cvinitsy_TohkaQAQ的博客-CSDN博客
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结