您现在的位置是:首页 >技术杂谈 >Ubuntu搭建APM固件编译环境网站首页技术杂谈
Ubuntu搭建APM固件编译环境
简介Ubuntu搭建APM固件编译环境
前言
Ubuntu20.04
APM 4.2.3
参考链接:
https://ardupilot.org/dev/docs/building-setup-linux.html
一、下载源码
git clone https://github.com/ArduPilot/ardupilot.git
下载完之后
cd ardupilot
git submodule init
git submodule update
在执行git submodule update时若出现报错没有更新完毕子模块,则继续执行该命令,直至更新完毕。
附上已经下载完全的源码:
链接:https://pan.baidu.com/s/1TQxyEM6PtStOkCGekGWCZw?pwd=u04f
提取码:u04f
–来自百度网盘超级会员V6的分享
二、配置编译环境
在ardupilot目录下执行下面的命令安装环境:
Tools/environment_install/install-prereqs-ubuntu.sh -y
如果发生报错,则重新执行上面的命令,直至出现下面的提示说明环境安装成功:
配置成功后执行:
. ~/.profile
三、编译固件
编译固件前,要配置编译的固件的目标硬件
我这里使用的是pix2.4.8飞控,所以使用fmuv3的固件,配置如下:
./waf configure --board fmuv3
然后用下面的命令编译四旋翼固件
./waf copter
编译成功如下:
编译后生成的固件在下图的目录
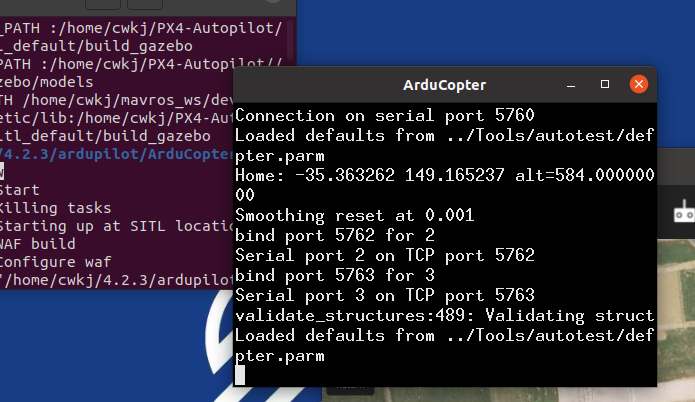
四、仿真
以多旋翼为例,在ardupilot/ArduCopter目录下执行:
sim_vehicle.py -w
执行完毕后会弹出下面的页面,然后打开地面站就可以链接到仿真的无人机了
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结