您现在的位置是:首页 >技术教程 >STM32信号量网站首页技术教程
STM32信号量
简介STM32信号量
目录
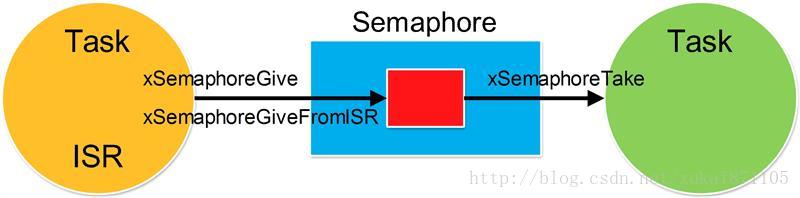
什么是信号量?
信号量(
Semaphore
),是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代
码段不被并发调用。
信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用,然后我们的量还可以
用来表示资源的数量,当我们的量只有
0
和
1
的时候,它就可以被称作二值信号量,只有两个状
态,当我们的那个量没有限制的时候,它就可以被称作为计数型信号量。
信号量也是队列的一种
什么是二值信号量?
二值信号量其实就是一个长度为
1
,大小为零的队列,只有
0
和
1
两种状态,通常情况下,我们用
它来进行互斥访问或任务同步。
互斥访问:比如门钥匙,只有获取到钥匙才可以开门
任务同步:比如我录完视频你才可以看视频
二值信号量相关 API 函数
|
函数
|
描述
|
|
xSemaphoreCreateBinary()
|
使用动态方式创建二值信号量
|
|
xSemaphoreCreateBinaryStatic()
|
使用静态方式创建二值信号量
|
|
xSemaphoreGive()
|
释放信号量
|
|
xSemaphoreGiveFromISR()
|
在中断中释放信号量
|
|
xSemaphoreTake()
|
获取信号量
|
|
xSemaphoreTakeFromISR()
|
在中断中获取信号量
|
1. 创建二值信号量
SemaphoreHandle_t xSemaphoreCreateBinary ( void )
参数:
无
返回值:
成功,返回对应二值信号量的句柄;
失败,返回
NULL
。
2. 释放二值信号量
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )
参数:
xSemaphore
:要释放的信号量句柄
返回值:
成功,返回
pdPASS
;
失败,返回
errQUEUE_FULL
。
3. 获取二值信号量
BaseType_t xSemaphoreTake ( SemaphoreHandle_t xSemaphore , TickType_t xTicksToWait );
参数:
xSemaphore
:要获取的信号量句柄
xTicksToWait
:超时时间,
0
表示不超时,
portMAX_DELAY
表示卡死等待;
返回值:
成功,返回
pdPASS
;
失败,返回
errQUEUE_FULL
。
实操
实验需求
创建一个二值信号量,按下
KEY1
则释放信号量,按下
KEY2
获取信号量。
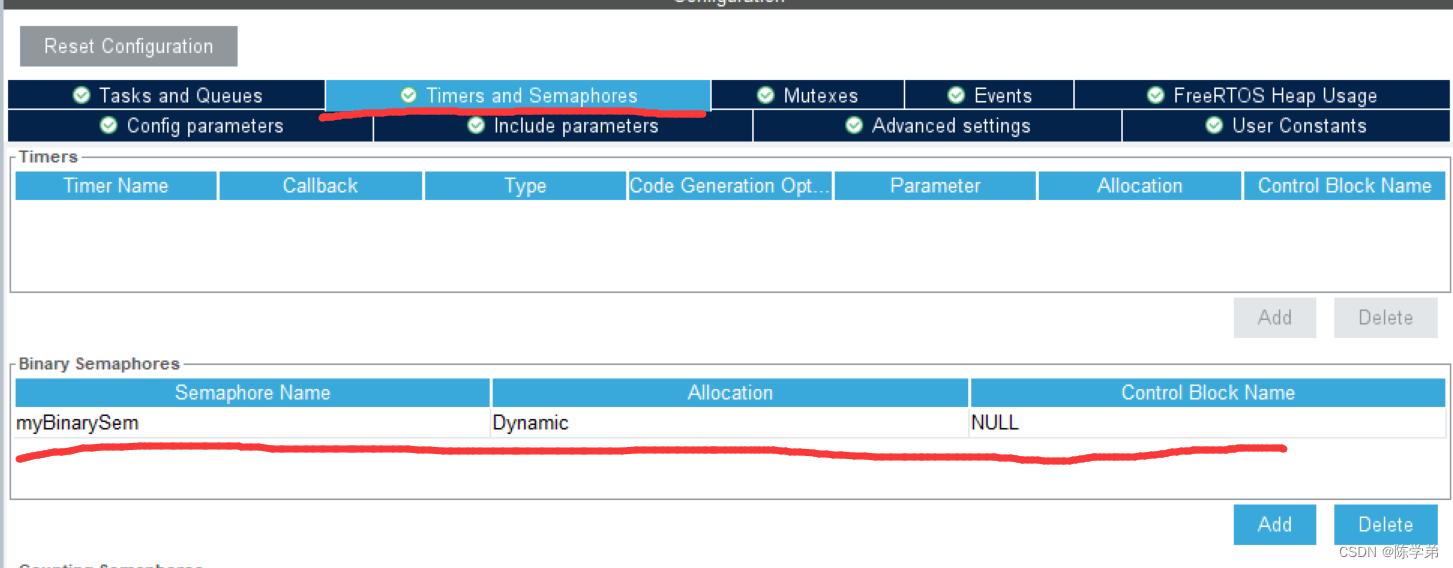
cubeMX配置
代码实现
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of myBinarySem */
osSemaphoreDef(myBinarySem);
//myBinarySemHandle = osSemaphoreCreate(osSemaphore(myBinarySem), 1);
myBinarySemHandle = xSemaphoreCreateBinary();
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of taskGive */
osThreadDef(taskGive, StartTaskGive, osPriorityNormal, 0, 128);
taskGiveHandle = osThreadCreate(osThread(taskGive), NULL);
/* definition and creation of taskTake */
osThreadDef(taskTake, StartTaskTake, osPriorityNormal, 0, 128);
taskTakeHandle = osThreadCreate(osThread(taskTake), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTaskGive */
/**
* @brief Function implementing the taskGive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
if (xSemaphoreGive(myBinarySemHandle) == pdTRUE)
printf("二值信号量放入成功
");
else
printf("二值信号量放入失败
");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskGive */
}
/* USER CODE BEGIN Header_StartTaskTake */
/**
* @brief Function implementing the taskTake thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
if (xSemaphoreTake(myBinarySemHandle, portMAX_DELAY ) == pdTRUE)
printf("二值信号量取出成功
");
else
printf("二值信号量取出失败
");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
计数型信号量
什么是计数型信号量?
计数型信号量相当于队列长度大于
1
的队列,因此计数型信号量能够容纳多个资源,这在计数型
信号量被创建的时候确定的。
计数型信号量相关 API 函数
|
函数
| 描述 |
|
xSemaphoreCreateCounting()
|
使用动态方法创建计数型信号量。
|
|
xSemaphoreCreateCountingStatic()
|
使用静态方法创建计数型信号量
|
|
uxSemaphoreGetCount()
|
获取信号量的计数值
|
计数型信号量的释放和获取与二值信号量完全相同 !
SemaphoreHandle_t xSemaphoreCreateCounting ( UBaseType_t uxMaxCount ,UBaseType_t uxInitialCount );
参数:
uxMaxCount
:可以达到的最大计数值
uxInitialCount
:创建信号量时分配给信号量的计数值
返回值:
成功,返回对应计数型信号量的句柄;
失败,返回
NULL
。
实操
实验需求
创建一个计数型信号量,按下
KEY1
则释放信号量,按下
KEY2
获取信号量。
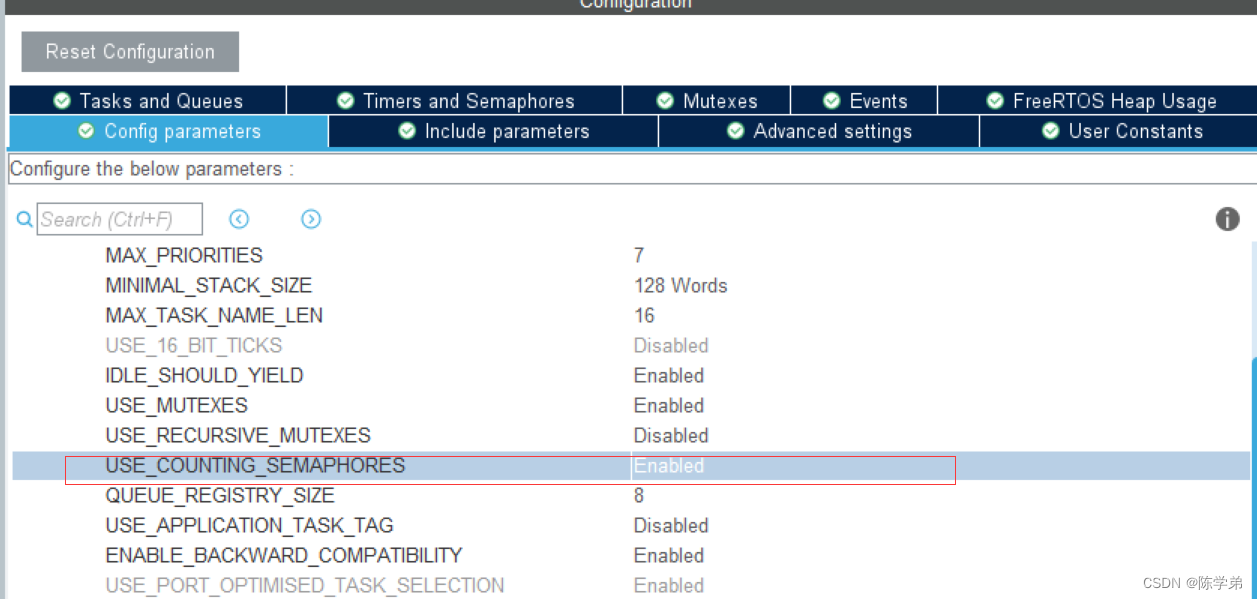
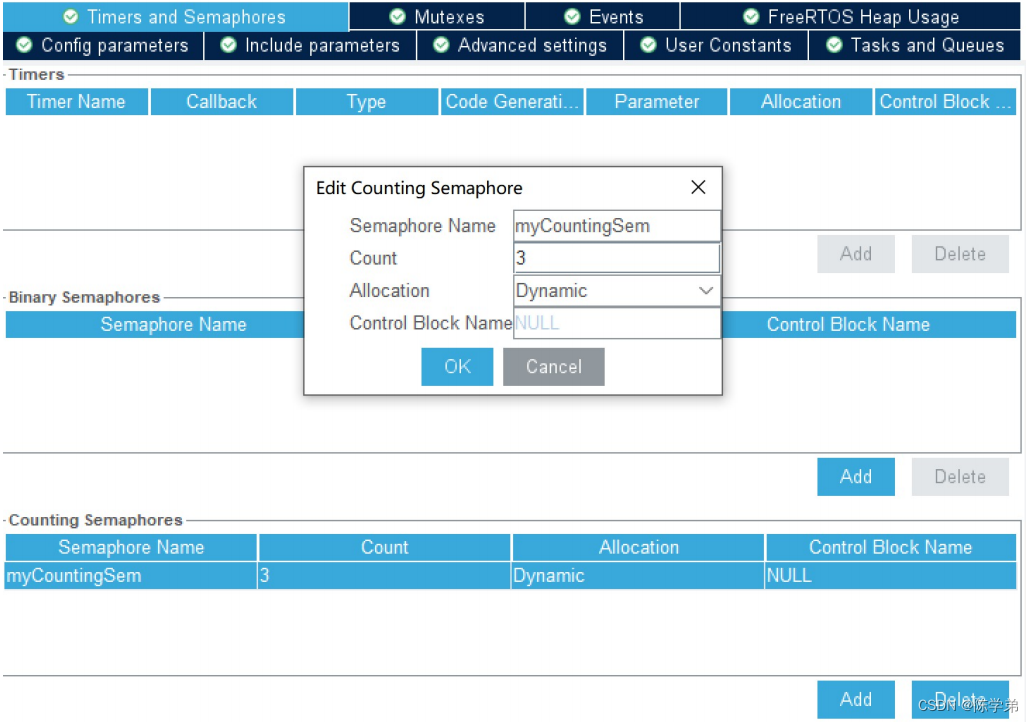
cubeMX配置
将 Config parameters 标签里的 USE_COUNTING_SEMAPHORES 设置为 Enabled 。
代码实现
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of myCountingSem */
osSemaphoreDef(myCountingSem);
// myCountingSemHandle = osSemaphoreCreate(osSemaphore(myCountingSem), 3);
myCountingSemHandle = xSemaphoreCreateCounting(3, 0);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of taskGive */
osThreadDef(taskGive, StartTaskGive, osPriorityNormal, 0, 128);
taskGiveHandle = osThreadCreate(osThread(taskGive), NULL);
/* definition and creation of taskTake */
osThreadDef(taskTake, StartTaskTake, osPriorityNormal, 0, 128);
taskTakeHandle = osThreadCreate(osThread(taskTake), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTaskGive */
/**
* @brief Function implementing the taskGive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
if (xSemaphoreGive(myCountingSemHandle) == pdTRUE)
printf("计数信号量放入成功
");
else
printf("计数信号量放入失败
");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
/* USER CODE END StartTaskGive */
}
}
/* USER CODE BEGIN Header_StartTaskTake */
/**
* @brief Function implementing the taskTake thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
if (xSemaphoreTake(myCountingSemHandle, 0 ) == pdTRUE)
printf("计数信号量获取成功
");
else
printf("计数信号量获取失败
");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。





站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结