您现在的位置是:首页 >技术交流 >一文讲解 基于C++手写Rpc项目网站首页技术交流
一文讲解 基于C++手写Rpc项目
目录
从集群式 到 分布式聊天服务器 看来只有好处 ,但代价是什么?
rpc 的 通信原理 remote procedure call 分布式通信
protobuf 它能够将 一个对象 编码成二进制,作为传输的中间文件 ,并能够将中间文件解析回原数据创建.proto文件 ,定义好相应的数据类型
UserServiceRpc 依赖代码的具体service类
UserServiceRpcStub 依赖代码的具体servicestub类
RpcProvider –NotifyService() 注册该服务至Rpc
github
请一定结合代码看博客
GitHub - stolendance/mrpc: 项目基于muduo高性能网络库+protobuf开发 分布式网络通信项目 mrpc
预备知识
集群和分布式
我的理解: 系统部署到一台单机上,会存在问题:硬件不够, 并发满足不了, 还容易挂
所以扩展成集群, 集群每个服务器上都部署一套完整的系统, 硬件够了,也不容易挂了
但该方式较为浪费,有些模块不需要部署多台上, 太费资源了, 所以分布式 , 把系统拆分成模块 放到每台服务器上 需要高并发的模块就多放几台 容易挂的也多放几台 资源需求就蛮少 当然这样系统的复杂性大幅度提高
集群:每一台服务器独立运行一个工程的所有模块
分布式:一个工程拆分了很多模块,每一个模块独立部署运行在一个服务器主机上,所有服务器协同工作共同提供服务,每一台服务器称作分布式的一个节点,根据节点的并发要求,对一个节点可以再做节点模块集群部署
单机聊天服务器
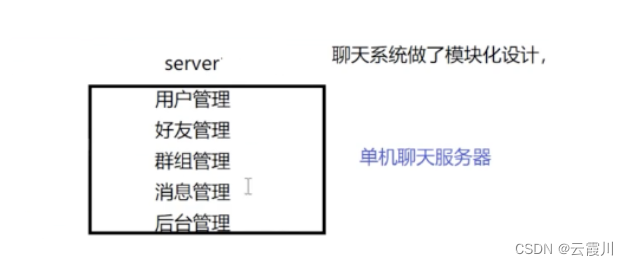
- 受限于硬件资源,聊天服务器所能承受的用户的并发量
- 硬件挂了即整个系统将崩溃
- 一个bug 整个代码全部重新编译
- 系统中,有些模块属于cpu密集型的,有些模块属于io密集型的,造成各个对于硬件需求是不一样的
集群聊天服务器
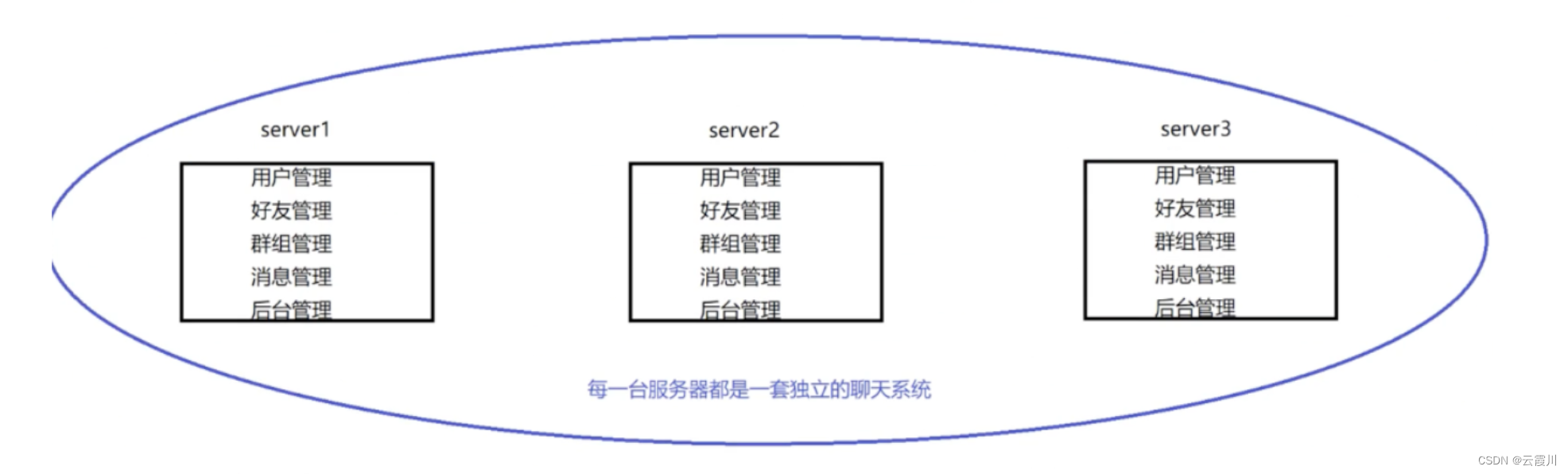
只解决了硬件资源, 挂了就完了这俩问题
代码需要费大力重新部署,每个模块对硬件的需求是不同的(只是水平扩展硬件) 这俩都没解决
比如后台管理模块这个模块,根本不需要高并发,没必要放到每个服务器上
访问需要通过负载均衡模块, 将需求分配到服务器上
分布式聊天服务器
把系统拆分成模块 放到每台服务器上 需要高并发的模块就多放几台 容易挂的也多放几台 资源需求就蛮少

比如消息管理 可以放置到 多个服务器上
硬件资源 解决
挂了 解决。 挂了 多放几台呗
bug重新部署 解决
io cpu需要不同 解决
根据分布式节点并发需求可以再扩展
从集群式 到 分布式聊天服务器 看来只有好处 ,但代价是什么?
==系统复杂性大大增加== , 或者说对基础架构要求很高
-
大系统的软件模块该怎么划分 各模块可能会实现大量重复的代码,需要架构的比较好
-
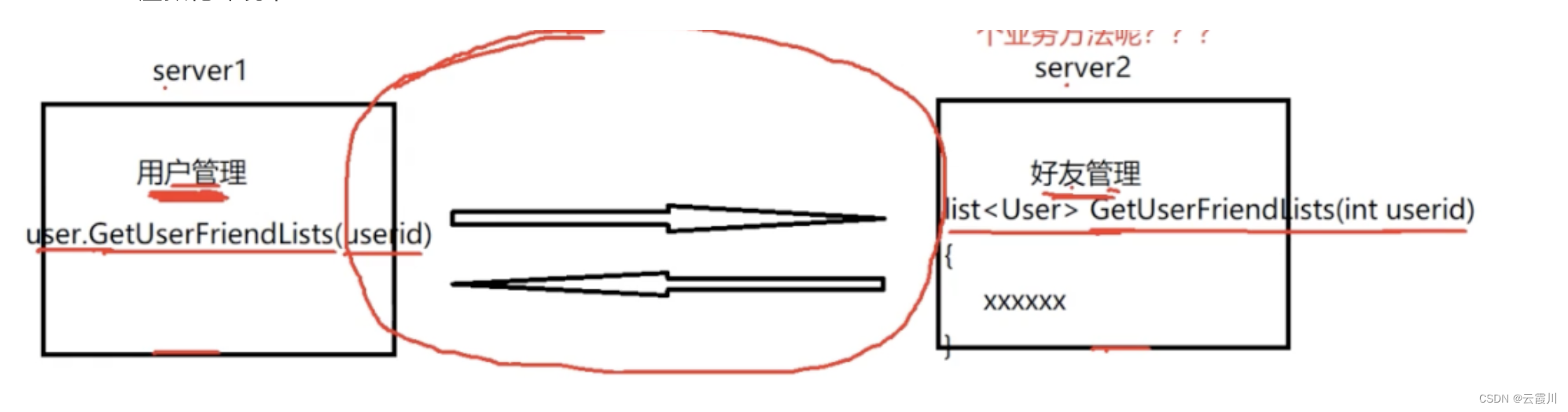
各个模块之间该怎么访问?
各个模块都运行在不同的进程里.
docker虚拟化环境中
rpc 的 通信原理 remote procedure call 分布式通信
机器a如何 调用 机器 b 的函数
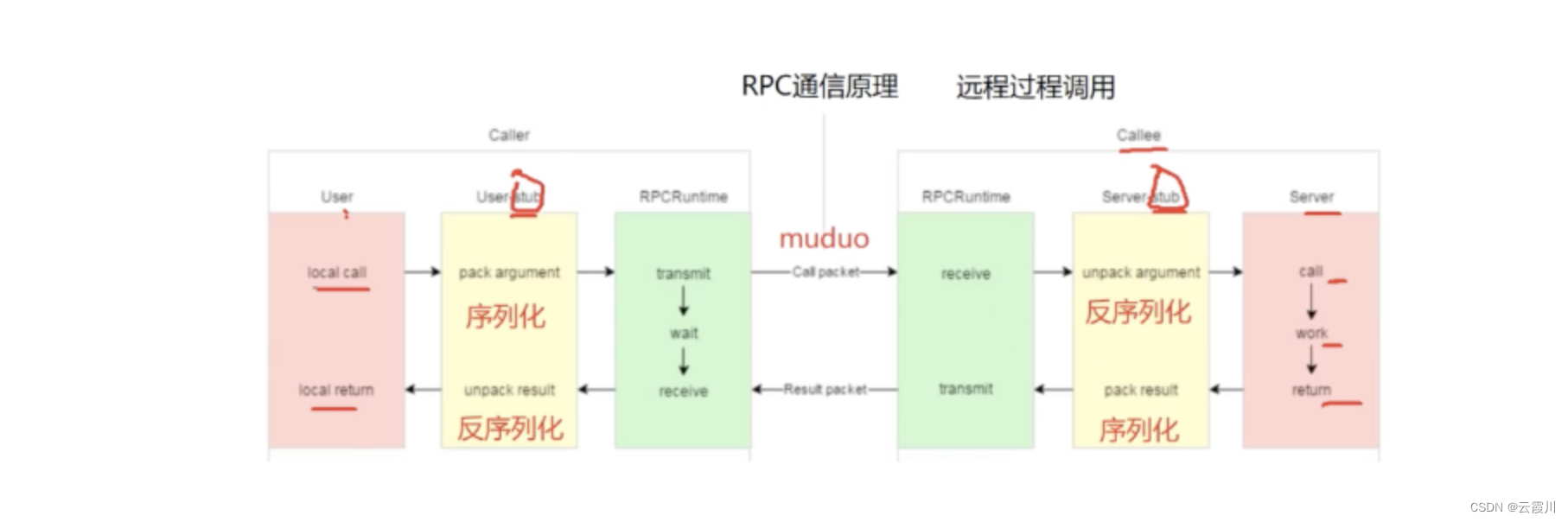
一个函数 发现是rpc函数 ,服务配置中心查到这个服务在哪个机器上 , 把函数名与参数序列化发送给该机器 , 机器反序列化 执行该函数。把结果序列化 传给 原机器。 原机器序列化 得到结果
手写的rpc部分
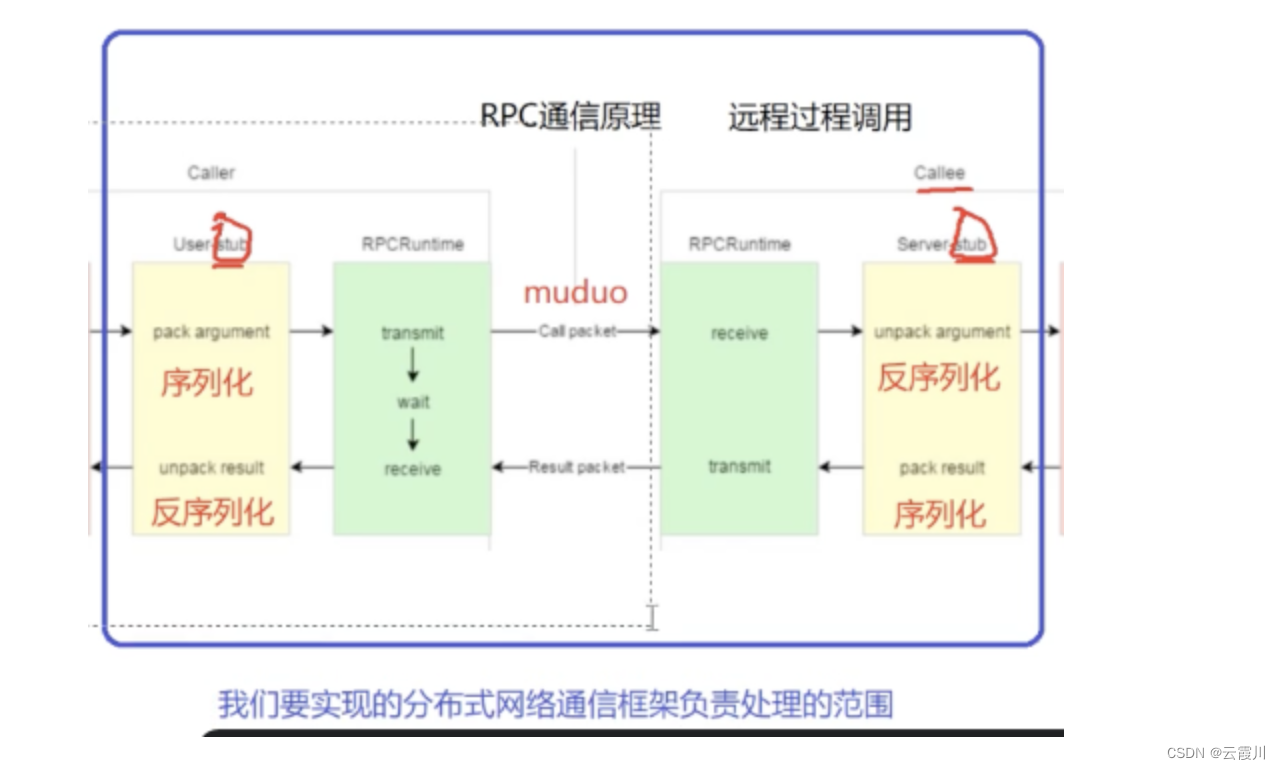
黄色部分:protobuf 序列化
绿色部分:zookeeper服务器配置中心 muduo网络库
protobuf>=json 好处?
- protobuf是二进制存储的;xml和json都是文本存储的
- protobuf不需要存储额外的信息,json是怎么存储数据的呢 json是keyvalue 需要key
protocol buffer 是google的一种数据交换的格式, 它独立于平台语言
它是一种二进制的格式,比使用xml(20倍) json(10倍) 进行数据交换快许多, 可以把它分布式应用之间的数据通信或者异构环境下的数据交换 作为一种效率和兼容性都很优秀的二进制数据传输格式,可以用于网络传输,配置文件,数据存储等领域
介绍protobuf
protocol Buffers are language-neutral, platform-neutral extensible mechanism for seializing structured data
Protobuf 这是一种序列化数据的协议 从我理解, 这更是一种 通信协议 ,定义了如何交换数据, 数据包含哪些等等. 它很厉害的地方在于 语言中立 ,大部分语言都支持,支持两边语言不同也能 , 平台中立, 支持跨平台
这非常厉害 , 它同时采用二进制的方式对数据进行传输 相较于json数据小了很多
那我们从各个方面对比下 json 与 protobuf 吧
protobuf 与 json
二者基本使用方式
json本质就是一种规定好格式的字符串, 不需要任何代码定义的支持, 它默认采用键值对的方式
来划分数据
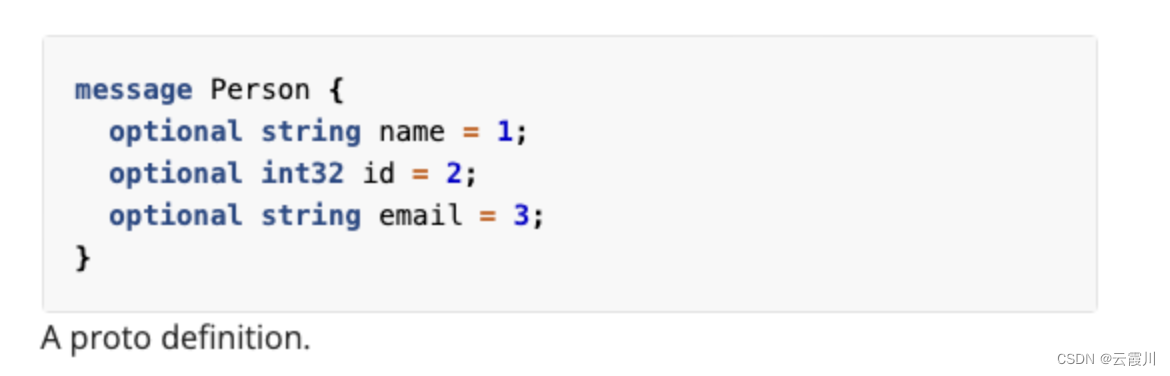
protobuf 双方首先使用同一份 .proto 文件
是的,在传输之前,二者需要进行商量好 传什么内容, 这样protobuf在传输过程中就不需要传输键值, 能很大地节省数据量
json不需要要商量好, 因此常用作接口, 来向任何可能调用接口的人表明数据的内容
而protobuf 用作服务器之间的通讯
在 .proto 文件中 定义了 需要传输的对象(message)
接下来讲解 protobuf 如何达到 语言中立 平台中立
定义好.proto文件后, 通过protoc 可以使用.proto 根据需要生成不同的代码依赖
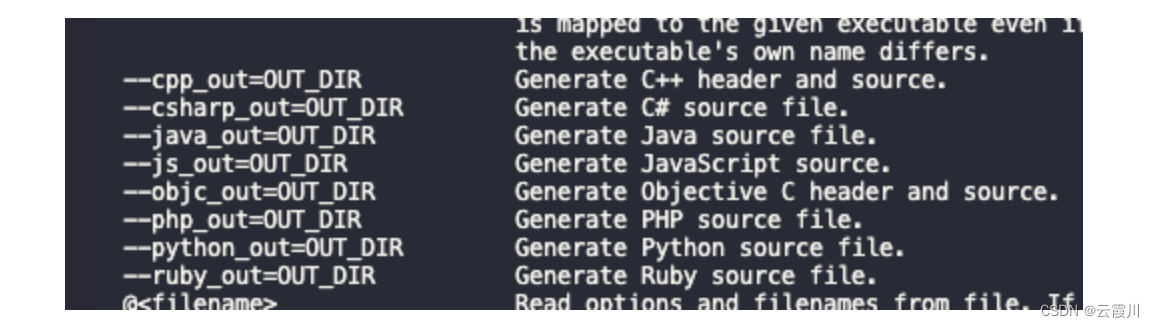
比如C++,会生成 .pb.cc .pb.h 其中代码包含了对象的定义及对象的序列化 与 解序列化 等相关函数
通过发送方与接收方都引入.proto生成的代码
发送方就可以做到定义数据并序列化
接受方就可以做到反序列化并取出数据
protobuf就是这样做到语言中立 , 平台中立的 , 太解耦了! 牛!
.proto的基本定义
讲解基本的代码定义, 如有更深层次的需要 , 可以 查看文档 与 阅读源码
syntax="proto3";// 声明proto版本
package fixbug;// 声明代码所在的包(对c++来说就是namespace)
定义一个对象(消息 message)
message ResultCode
{
int32 errcode=1;
bytes errmsg=2; // 1 ,2 代表第一个参数, 第二个参数 是占位符
}
还可以组合
message GetFriendListsResponse
{
ResultCode result=1;
repeated User friend_lists=2;
}
protobuf的基本代码
#include<iostream>#include<string>#include "test.pb.h"using namespace fixbug;using namespace std; // 引入// 定义对象// 封装了login请求对象的数据LoginRequest req;req.set_name("zhang san");req.set_pwd("123456");// 序列化// 对象数据序列化-》char*string send_str;if(req.SerializeToString(&send_str)){cout<<send_str.c_str()<<endl;}// 反序列化// 从send_str 反序列化一个login请求对象LoginRequest reqB;if(reqB.ParseFromString(send_str)){ cout<<reqB.name()<<endl; cout<<reqB.pwd()<<endl;}
protobuf 它能够将 一个对象 编码成二进制,作为传输的中间文件 ,并能够将中间文件解析回原数据创建.proto文件 ,定义好相应的数据类型
编写 xxx.proto文件
protoc test.proto –cpp_out=“./” // 生成相应的代码,包含数据类型的编码
// main.cpp 为调用proto的代码, 链接动态库进行编译
g++ test.pb.cc main.cpp -o test pkg-config --cflags --libs protobuf -lpthread
文件头
test.proto
// 指明版本及包名
syntax="proto3";// 声明proto版本
package fixbug;// 声明代码所在的包(对c++来说就是namespace)
基本对象的定义
test.proto
string 定义成byte会更好
// 定义登陆请求消息类型
message LoginRequest
{
string name=1; // 表明第一个字段
string pwd=2; // 定义第二个字段
}
// 定义登陆响应消息类型
message LoginResponse
{
int32 errcode=1;
string errmsg=2;
bool success=3;
}
基本对象的初始化与赋值
main.cpp
LoginRequest req;
req.set_name("zhang san");
req.set_pwd("123456");
基本对象的编码与解码
// 编码
string send_str;
if(req.SerializeToString(&send_str))
{
cout<<send_str.c_str()<<endl;
}
// 解码
LoginRequest reqB;
if(reqB.ParseFromString(send_str))
{
cout<<reqB.name()<<endl;
cout<<reqB.pwd()<<endl;
}
对象中的“组合” 定义
一个对象中包含另一个对象即为组合
test.proto
message ResultCode
{
int32 errcode=1;
string errmsg=2;
}
// 定义登陆响应消息类型
message LoginResponse
{
ResultCode result=1;
bool success=2;
}
对象中的“组合” 初始化与赋值
main.cpp
LoginResponse rsp;
ResultCode *rc=rsp.mutable_result();
rc->set_errcode(1);
rc->set_errmsg("登陆处理失败");
列表定义
message User
{
bytes name;
uint32 age=2;
enum Sex
{
MAN=0;
WOMAN=1;
}
Sex sex=3;
}
message GetFriendListsResponse
{
ResultCode result=1;
repeated User users=2;
}
列表的初始化
test.proto
GetFriendListsResponse rlist;
ResultCode* rc2=rlist.mutable_result();
rc2->set_errcode(0);
User *user1=rlist.add_friend_lists();
user1->set_name("zhang san");
user1->set_age(20);
user1->set_sex(User::MAN);
User *user2=rlist.add_friend_lists();
user2->set_name("zhang san");
user2->set_age(20);
user2->set_sex(User::MAN);
遍历列表
main.cpp
cout<<rlist.friend_lists_size()<<endl;
for(auto item:rlist.friend_lists())
{
cout<<item.name()<<endl;
cout<<item.age()<<endl;
}
return 0;
创建 XXX.proto 文件// 指明版本及包名
rpc service
在前面protobuf中 定义了对象
接下来要在protobuf 中,定义相关的函数
函数的注册
.proto
// 定义下列选项, 表明rpc服务定义方法需要生成
option cc_generic_services=true;
// 在proto中定义rpc方法类型 必须定义option 才能生成该代码
service UserServiceRpc
{
rpc Login(LoginRequest) returns(LoginResponse);
rpc GetFriendLists(GetFriendListsRequest) returns(GetFriendListsResponse);
}
项目结构
bin: 可执行文件
build:项目编译文件
lib:项目库文件
src:源代码
test:测试代码
example:框架代码使用范例
CMakeLists: 顶层的cmake文件
readme: 说明文档
项目准备
安装muduo 与 protobuf 库
安装muduo
- 安装依赖: sudo apt-get install libbost-dev libbost-test-dev sudo apt-get install libcurl4-openssl-dev libc-ares-dev
- 拷贝文件 git clone GitHub - chenshuo/muduo: Event-driven network library for multi-threaded Linux server in C++11
- ./build.sh
安装protobuf
链接: 百度网盘 请输入提取码 提取码: avqd –来自百度网盘超级会员v5的分享
- 解压压缩包: unzip protob·uf-master.zip
- 进入解压后的文件夹: cd protobuf-master
- 安装所需工具: sudo apt-get install autoconf automake libtool curl make g++ unzip
- 自动生成configure配置文件 ./autogen.sh
- 配置环境: ./configure
- 编译源代码: make
- 安装 sudo make install
- 刷新动态库: sudo ldconfig
库的测试与使用
proto库的测试 在 test/proto
定义test.proto
使用protobuf 处理 test.proto 生成test.pb.c、test.proto
protoc test.proto --cpp_out="./" // 生成相应的代码,包含数据类型的编码
在main.cpp测试了protobuf的功能
编译main.cpp
g++ test.pb.cc main.cpp -o test `pkg-config --cflags --libs protobuf` -lpthread
执行可执行文件
./test
可以看到 成功对定义的对象进行赋值,序列化, 反序列化, 取值
muduo库的测试 在test/muduo
muduo_test.cpp 实现了一个简单的echo server
编译:
g++ -std=c++11 muduo_test.cpp -lmuduo_net -lmuduo_base -lpthread -o muduo_test
执行:
一个shell中执行
./muduo_test
另一个shell中执行
telnet 127.0.0.1 8032
echo server 正常
protobuf 我的理解及源码分析
- protobuf 实际上是一个通讯协议 两边通过使用同一份.proto文件可以定义 对象、函数、服务
- protobuf通过针对不同语言基于.proto文件生成依赖代码 达到跨平台, 语言中立的效果
- protobuf基础库分为三大层: service、method、message、 这三个是protobuf的基类
service 代表 一个服务
service.h
我们可以看到service基类, 有几个函数
GetDescriptor() 获得service描述符 可以获得service相关的属性
callmethod() 调用service下的method
getrequestPrototype() 根据message描述符 得到参数的message
getresponseprototype() 根据message描述符 得到响应的message
class PROTOBUF_EXPORT Service {
public:
inline Service() {}
virtual ~Service();
enum ChannelOwnership { STUB_OWNS_CHANNEL, STUB_DOESNT_OWN_CHANNEL };
virtual const ServiceDescriptor* GetDescriptor() = 0;
virtual void CallMethod(const MethodDescriptor* method,
RpcController* controller, const Message* request,
Message* response, Closure* done) = 0;
virtual const Message& GetRequestPrototype(
const MethodDescriptor* method) const = 0;
virtual const Message& GetResponsePrototype(
const MethodDescriptor* method) const = 0;
private:
GOOGLE_DISALLOW_EVIL_CONSTRUCTORS(Service);
};
method 代表 一个方法
message 代表 一个对象 , 通常把函数的参数包装成一个对象、函数的返回值包装成一个对象
protobuf生成的依赖代码(.user.pb.h user.pb.cc) 主要包含用户自定义的 service、method、message具体子类
他们从service、method、message继承而来
servicedescriptor
可以看出主要获得service相关的属性
可以得到service的name、full_name、methoddescriptor、method的数目…
// Describes an RPC service. Use DescriptorPool to construct your own
// descriptors.
class PROTOBUF_EXPORT ServiceDescriptor {
public:
typedef ServiceDescriptorProto Proto;
// The name of the service, not including its containing scope.
const std::string& name() const;
// The fully-qualified name of the service, scope delimited by periods.
const std::string& full_name() const;
// Index of this service within the file's services array.
int index() const;
// The .proto file in which this service was defined. Never nullptr.
const FileDescriptor* file() const;
// Get options for this service type. These are specified in the .proto file
// by placing lines like "option foo = 1234;" in the service definition.
// Allowed options are defined by ServiceOptions in descriptor.proto, and any
// available extensions of that message.
const ServiceOptions& options() const;
// The number of methods this service defines.
int method_count() const;
// Gets a MethodDescriptor by index, where 0 <= index < method_count().
// These are returned in the order they were defined in the .proto file.
const MethodDescriptor* method(int index) const;
// Look up a MethodDescriptor by name.
const MethodDescriptor* FindMethodByName(const std::string& name) const;
// See Descriptor::CopyTo().
void CopyTo(ServiceDescriptorProto* proto) const;
// See Descriptor::DebugString().
std::string DebugString() const;
// See Descriptor::DebugStringWithOptions().
std::string DebugStringWithOptions(const DebugStringOptions& options) const;
// Source Location ---------------------------------------------------
// Updates |*out_location| to the source location of the complete
// extent of this service declaration. Returns false and leaves
// |*out_location| unchanged iff location information was not available.
bool GetSourceLocation(SourceLocation* out_location) const;
private:
typedef ServiceOptions OptionsType;
// Allows access to GetLocationPath for annotations.
friend class io::Printer;
friend class compiler::cpp::Formatter;
// See Descriptor::DebugString().
void DebugString(std::string* contents,
const DebugStringOptions& options) const;
// Walks up the descriptor tree to generate the source location path
// to this descriptor from the file root.
void GetLocationPath(std::vector<int>* output) const;
const std::string* name_;
const std::string* full_name_;
const FileDescriptor* file_;
const ServiceOptions* options_;
MethodDescriptor* methods_;
int method_count_;
// IMPORTANT: If you add a new field, make sure to search for all instances
// of Allocate<ServiceDescriptor>() and AllocateArray<ServiceDescriptor>() in
// descriptor.cc and update them to initialize the field.
// Must be constructed using DescriptorPool.
ServiceDescriptor() {}
friend class DescriptorBuilder;
friend class FileDescriptor;
friend class MethodDescriptor;
GOOGLE_DISALLOW_EVIL_CONSTRUCTORS(ServiceDescriptor);
};
method -> methoddescriptor
是的, 不存在method基类、存在的是methoddescriptor
可以看到 可以得到method的name、full_name、index、file、servicedescriptor ….
不能通过methoddescriptor调用, 只能通过service进行method调用
class PROTOBUF_EXPORT MethodDescriptor {
public:
typedef MethodDescriptorProto Proto;
// Name of this method, not including containing scope.
const std::string& name() const;
// The fully-qualified name of the method, scope delimited by periods.
const std::string& full_name() const;
// Index within the service's Descriptor.
int index() const;
// The .proto file in which this method was defined. Never nullptr.
const FileDescriptor* file() const;
// Gets the service to which this method belongs. Never nullptr.
const ServiceDescriptor* service() const;
// Gets the type of protocol message which this method accepts as input.
const Descriptor* input_type() const;
// Gets the type of protocol message which this message produces as output.
const Descriptor* output_type() const;
// Gets whether the client streams multiple requests.
bool client_streaming() const;
// Gets whether the server streams multiple responses.
bool server_streaming() const;
// Get options for this method. These are specified in the .proto file by
// placing lines like "option foo = 1234;" in curly-braces after a method
// declaration. Allowed options are defined by MethodOptions in
// descriptor.proto, and any available extensions of that message.
const MethodOptions& options() const;
// See Descriptor::CopyTo().
void CopyTo(MethodDescriptorProto* proto) const;
// See Descriptor::DebugString().
std::string DebugString() const;
// See Descriptor::DebugStringWithOptions().
std::string DebugStringWithOptions(const DebugStringOptions& options) const;
// Source Location ---------------------------------------------------
// Updates |*out_location| to the source location of the complete
// extent of this method declaration. Returns false and leaves
// |*out_location| unchanged iff location information was not available.
bool GetSourceLocation(SourceLocation* out_location) const;
private:
typedef MethodOptions OptionsType;
// Allows access to GetLocationPath for annotations.
friend class io::Printer;
friend class compiler::cpp::Formatter;
// See Descriptor::DebugString().
void DebugString(int depth, std::string* contents,
const DebugStringOptions& options) const;
// Walks up the descriptor tree to generate the source location path
// to this descriptor from the file root.
void GetLocationPath(std::vector<int>* output) const;
const std::string* name_;
const std::string* full_name_;
const ServiceDescriptor* service_;
mutable internal::LazyDescriptor input_type_;
mutable internal::LazyDescriptor output_type_;
const MethodOptions* options_;
bool client_streaming_;
bool server_streaming_;
// IMPORTANT: If you add a new field, make sure to search for all instances
// of Allocate<MethodDescriptor>() and AllocateArray<MethodDescriptor>() in
// descriptor.cc and update them to initialize the field.
// Must be constructed using DescriptorPool.
MethodDescriptor() {}
friend class DescriptorBuilder;
friend class ServiceDescriptor;
GOOGLE_DISALLOW_EVIL_CONSTRUCTORS(MethodDescriptor);
};
message
class PROTOBUF_EXPORT Message : public MessageLite {
public:
inline Message() {}
~Message() override {}
// Basic Operations ------------------------------------------------
// Construct a new instance of the same type. Ownership is passed to the
// caller. (This is also defined in MessageLite, but is defined again here
// for return-type covariance.)
Message* New() const override = 0;
// Construct a new instance on the arena. Ownership is passed to the caller
// if arena is a nullptr. Default implementation allows for API compatibility
// during the Arena transition.
Message* New(Arena* arena) const override {
Message* message = New();
if (arena != nullptr) {
arena->Own(message);
}
return message;
}
UserServiceRpc 依赖代码的具体service类
可以看到 其继承service基类 虚函数包含 定义的函数、 需要我们继承该类, 把函数实现了. 即声明该服务(完成服务的定义)
class UserServiceRpc : public ::PROTOBUF_NAMESPACE_ID::Service {
protected:
// This class should be treated as an abstract interface.
inline UserServiceRpc() {};
public:
virtual ~UserServiceRpc();
typedef UserServiceRpc_Stub Stub;
static const ::PROTOBUF_NAMESPACE_ID::ServiceDescriptor* descriptor();
virtual void Login(::PROTOBUF_NAMESPACE_ID::RpcController* controller,
const ::fixbug::LoginRequest* request,
::fixbug::LoginResponse* response,
::google::protobuf::Closure* done);
virtual void Hello(::PROTOBUF_NAMESPACE_ID::RpcController* controller,
const ::fixbug::HelloRequest* request,
::fixbug::HelloReponse* response,
::google::protobuf::Closure* done);
// implements Service ----------------------------------------------
const ::PROTOBUF_NAMESPACE_ID::ServiceDescriptor* GetDescriptor();
void CallMethod(const ::PROTOBUF_NAMESPACE_ID::MethodDescriptor* method,
::PROTOBUF_NAMESPACE_ID::RpcController* controller,
const ::PROTOBUF_NAMESPACE_ID::Message* request,
::PROTOBUF_NAMESPACE_ID::Message* response,
::google::protobuf::Closure* done);
const ::PROTOBUF_NAMESPACE_ID::Message& GetRequestPrototype(
const ::PROTOBUF_NAMESPACE_ID::MethodDescriptor* method) const;
const ::PROTOBUF_NAMESPACE_ID::Message& GetResponsePrototype(
const ::PROTOBUF_NAMESPACE_ID::MethodDescriptor* method) const;
private:
GOOGLE_DISALLOW_EVIL_CONSTRUCTORS(UserServiceRpc);
};
UserServiceRpcStub 依赖代码的具体servicestub类
UserServiceRpcStub继承自UserviceRpc
它对servicestub中定义的虚函数 Login Hello进行了具体实现
将它们具体使用RpcChannel的callmethod, 汇聚到了统一调用相同的函数上
没错, 这是为caller实现的一个基础类 ,我们通过继承RpcChannel 实现新的callmethod, 能够统一实现发送服务名,函数名,参数的能力
class UserServiceRpc_Stub : public UserServiceRpc { public: UserServiceRpc_Stub(::PROTOBUF_NAMESPACE_ID::RpcChannel* channel); UserServiceRpc_Stub(::PROTOBUF_NAMESPACE_ID::RpcChannel* channel, ::PROTOBUF_NAMESPACE_ID::Service::ChannelOwnership ownership); ~UserServiceRpc_Stub(); inline ::PROTOBUF_NAMESPACE_ID::RpcChannel* channel() { return channel_; } // implements UserServiceRpc ------------------------------------------ void Login(::PROTOBUF_NAMESPACE_ID::RpcController* controller, const ::fixbug::LoginRequest* request, ::fixbug::LoginResponse* response, ::google::protobuf::Closure* done); void Hello(::PROTOBUF_NAMESPACE_ID::RpcController* controller, const ::fixbug::HelloRequest* request, ::fixbug::HelloReponse* response, ::google::protobuf::Closure* done); private: ::PROTOBUF_NAMESPACE_ID::RpcChannel* channel_; bool owns_channel_; GOOGLE_DISALLOW_EVIL_CONSTRUCTORS(UserServiceRpc_Stub);};
以Resultcode为例 依赖代码的具体message类
不具体介绍, 在protobuf示例代码中展示如何使用,核心思想是封装定义好的message 并且提供构造函数和设置初始化值相关函数 提供序列化和反序列化
项目深剖 以login函数为例
tips:试着把整体逻辑用最简单的方式进行讲解:
从==callee方(函数提供方)==出发
我们首先定义proto文件,在其中定义message对象、service对象 . 对于service对象,我们需要继承, 实现其中定义的虚函数(完成service对象的定义) , 此时我们就完成了 “服务类” 的定义
然后需要对服务类初始化, 并且以哈希的方式“存储”(这样根据rpc服务名和函数名 可以快速进行调用)
启动rpc服务后, 将所有服务与函数注册至zookeeper
使用muduo 做一个echo server , 接受序列化后的服务名 及函数名 和 参数
解序列化后 进行调用, 并且通过回调函数发送函数执行完后的结果
从==caller方(函数调用方)==出发
定义proto文件后, 依赖代码中同时形成了service_stub对象, 其继承了service对象, 并且收束至调用 传入的rpcchannel对象的callmethod方法, 因此我们可以继承rpcchannel对象 ,并重写其中的callmethod方法, 使其先访问zookeeper ,找到服务器的ip地址与端口号, 发送服务名及 函数名 和 参数 , 从而调用远程函数, 得到结果后, 解析即可
将以 下面的线进行深剖
配置类外层->配置类底层
callee-> 如何注册一个rpc函数-> 底层
caller-> 如何调用一个rpc函数->底层
异步日志
框架外层-配置类
配置类的目的是 为了, ==从磁盘的文件中,读取信息到内存中, 使得程序可以随时从内存中取信息, 不用随时去磁盘读==
src/include/MrpcApplication.h src/MrpcApplication.cpp
使用单例模式, 内存中读一份就ok了,使用的是饿汉模式
在本项目中
callee方
配置类,需要定义
rpc节点的ip地址
rpc节点的端口号地址
zookeeper的ip地址
zookeeper的port地址
相当于 ==需要把服务方提供方的ip地址与端口号 注册到zookeeper中==
caller方
配置类,需要定义
zookeeper的ip地址
zookeeper的port地址
相当于 ==服务调用方访问zookeeper得到rpc服务节点的ip地址及端口号, 因此不需要在文件中写明==
项目中,层层开发, 最后加上zookeeper , 省事,两者读了一个 test.conf
但要明确,服务调用方 最后版本中, 并没有访问rpc的ip和port
配置文件
# rpc节点的地址
rpcserverip=127.0.0.1
#rpc节点的port端口号
rpcserverport=8088
#zk的ip地址
zookeeperip=127.0.0.1
#zk的port地址
zookeeperport=2181
配置类的初始化
MrpcApplication::Init(argc,argv);
配置类的头文件及cpp
src/include/MrpcApplication.h
要点: 采用单例模式 , 把构造相关的函数都给delete掉, 默认构造函数只能设置成private, 因为要在成员方法中用
#pragma once
#include"MrpcConfig.h"
// mrpc 框架的初始化类
// 框架只需要一个 因此用单例模式进行设计
class MrpcApplication
{
public:
static void Init(int argc, char ** argv);
static MrpcApplication& GetInstance();
static MrpcConfig& getConfig();
private:
static MrpcConfig m_config;
MrpcApplication(){};
MrpcApplication(const MrpcApplication & other)=delete;
MrpcApplication(MrpcApplication && other)=delete;
MrpcApplication& operator =(const MrpcApplication& other)=delete;
};
src/MrpcApplication.cpp
要点:
- 可执行文件的参数要求,在运行时必须指明配置文件 即必须要有-i选项 且提供配置文件
- 使用单例模式 饿汉模式 线程安全 在局部函数中申请静态变量, 延长其生命周期 .同时C++11 编译器能保证初始化静态局部变量的线程安全性
#include<iostream>
#include<unistd.h>
#include "MrpcApplication.h"
MrpcConfig MrpcApplication::m_config;
void ShowArgsHelp()
{
std::cout<<"format: command -i <configfile>" <<std::endl;
}
void MrpcApplication::Init(int argc, char ** argv)
{
if(argc<2)
{
//未传入任何参数,错误
ShowArgsHelp();
exit(EXIT_FAILURE);
}
int c=0;
std::string config_file;
while((c=getopt(argc,argv,"i:")) !=-1)
{
switch(c)
{
case 'i':
config_file=optarg;
break;
case '?':
std::cout<<"invalid args!"<<std::endl;
ShowArgsHelp();
exit(EXIT_FAILURE);
case ':':
std::cout<<"need <configfile>" <<std::endl;
ShowArgsHelp();
exit(EXIT_FAILURE);
default:
break;
}
}
// 开始加载配置文件 rpcserver_ip= rpcserver_port= zookeeper_ip= zookeeper_port=
m_config.LoadConfigFile(config_file.c_str());
std::cout<<"rpcserverip"<<":"<<m_config.Load("rpcserverip")<<std::endl;
std::cout<<"rpcserverport"<<":"<<m_config.Load("rpcserverport")<<std::endl;
std::cout<<"zookeeperip"<<":"<<m_config.Load("zookeeperip")<<std::endl;
std::cout<<"zookeeperport"<<":"<<m_config.Load("zookeeperport")<<std::endl;
}
MrpcApplication& MrpcApplication::GetInstance()
{
static MrpcApplication app;
return app;
}
MrpcConfig& MrpcApplication::getConfig()
{
return m_config;
}
框架外层–如何注册一个rpc函数
定义.proto文件
在example/userservice.cpp中
定义服务, 其中的rpc函数 、rpc函数参数、 rpc函数返回值
syntax="proto3";package fixbug;option cc_generic_services = true;message ResultCode{ int32 errcode=1; bytes errmsg=2;}message LoginRequest{ bytes name=1; bytes pwd=2;}message LoginResponse{ ResultCode result=1; bool success=2;}service UserServiceRpc{ rpc Login(LoginRequest) returns(LoginResponse);}
编译.proto文件, 生成相应的依赖代码
protoc user.proto -cpp_out=="./"
会生成user.pb.h, user.pb.c , 依赖代码会生成具体的service、具体的message、具体的method 相关依赖代码
(是 service message method 结合 .proto所定义的子类)
声明一个服务
- 在.proto文件中定义函数、函数的参数、函数的返回值,根据 .proto 生成 相关代码依赖文件
- 继承protobuf依赖代码中生成的Rpc函数类
- 通过调用本地方法实现其中的虚函数
class UserService:public fixbug::UserServiceRpc
{
public:
void Hello(::google::protobuf::RpcController* controller,
const ::fixbug::HelloRequest* request,
::fixbug::HelloReponse* response,
::google::protobuf::Closure* done)
{
std::string name=request->name();
std::string rs=HelloQ(name);
response->set_hello(rs);
done->Run();
}
bool Login(std::string name, std::string pwd)
{
std::cout<<"doing local service: Login"<<std::endl;
std::cout<<"name: "<<name<<"pwd:"<<pwd<<std::endl;
return true;
}
/*
重写基类UserServiceRpc的虚函数,下面这些方法都是框架直接调用的
caller->login(loginrequest)->
*/
void Login(::google::protobuf::RpcController* controller,
const ::fixbug::LoginRequest* request,
::fixbug::LoginResponse* response,
::google::protobuf::Closure* done)
{
// 框架给业务上爆了请求参数LoginRequest,业务获取相应数据做本地业务
std::string name=request->name();
std::string pwd=request->pwd();
std::cout<<"rpc_login name: "<<name<<std::endl;
std::cout<<"rpc_login pwd: "<<pwd<<std::endl;
// 做本地业务
bool login_result=Login(name,pwd);
// 把响应写入
fixbug::ResultCode * code=response->mutable_result();
code->set_errcode(0);
code->set_errmsg("");
response->set_success(login_result);
// 执行回调操作 执行响应对象数据的序列化和网络发送(都是由框架来完成的)
done->Run();
}
注册该服务
// 调用框架的初始化操作
MrpcApplication::Init(argc,argv);
// 把UserService对象发布到rpc节点上
RpcProvider provider; // 网络发布对象
provider.NotifyService(new UserService());
启动Rpc
//启动rpc
provider.Run();
函数的定义
底层
class UserService:public fixbug::UserServiceRpc
{
public:
bool Login(std::string name, std::string pwd)
{
std::cout<<"doing local service: Login"<<std::endl;
std::cout<<"name: "<<name<<"pwd:"<<pwd<<std::endl;
return true;
}
/*
重写基类UserServiceRpc的虚函数,下面这些方法都是框架直接调用的
caller->login(loginrequest)->
*/
void Login(::google::protobuf::RpcController* controller,
const ::fixbug::LoginRequest* request,
::fixbug::LoginResponse* response,
::google::protobuf::Closure* done)
{
// 框架给业务上爆了请求参数LoginRequest,业务获取相应数据做本地业务
std::string name=request->name();
std::string pwd=request->pwd();
std::cout<<"rpc_login name: "<<name<<std::endl;
std::cout<<"rpc_login pwd: "<<pwd<<std::endl;
// 做本地业务
bool login_result=Login(name,pwd);
// 把响应写入
fixbug::ResultCode * code=response->mutable_result();
code->set_errcode(0);
code->set_errmsg("");
response->set_success(login_result);
// 执行回调操作 执行响应对象数据的序列化和网络发送(都是由框架来完成的)
done->Run();
}
};
框架底层–rpc服务的注册底层
RpcProvider.h
RpcProvider 主要有NotifyService() , 代表将服务注册至Rpc
Run(), 代表启动Rpc
class RpcProvider
{
public:
// 这里是框架提供的外部进行注册
// void NotifyServise(UserService* service) 不能依赖于某个具体业务!
void NotifyService(google::protobuf::Service * service);
// 启动网络调用函数
void Run();
void OnConnection(const muduo::net::TcpConnectionPtr &conn);
void OnMessage(const muduo::net::TcpConnectionPtr&,muduo::net::Buffer*,muduo::Timestamp);
void callmeback(const muduo::net::TcpConnectionPtr& conn,google::protobuf::Message* response);
private:
struct ServiceInfo
{
google::protobuf::Service* service_ptr;
std::map<std::string,const google::protobuf::MethodDescriptor* > method_dic;
};
std::map<std::string,ServiceInfo> service_dic;
// 组合了evenetloop
muduo::net::EventLoop m_eventLoop;
};
RpcProvider –NotifyService() 注册该服务至Rpc
RpcProvider 以哈希的方式 存储Service 及其下的method , 从而可以根据服务名与服务快速调用该函数
RpcProvider 以 该形式 存储Rpc服务
{“service1_name”: [service1_ptr, {“method1_name”: method_des_ptr …. } ] , “service2_name”: , “service3_name”: ….}
void RpcProvider::NotifyService(google::protobuf::Service * service){
const google::protobuf::ServiceDescriptor* service_ptr =service->GetDescriptor();
// 得到method的数量
const std::string service_name=service_ptr->name();
int n= service_ptr->method_count();
std::map<std::string,const google::protobuf::MethodDescriptor* > method_dic;
// 遍历方法 ,进行存储
for(int i=0;i<n;i++)
{
const google::protobuf::MethodDescriptor * method_ptr=service_ptr->method(i);
const std::string method_name=method_ptr->name();
method_dic[method_name]=method_ptr;
}
ServiceInfo sinfo;
sinfo.service_ptr=service;
sinfo.method_dic=method_dic;
service_dic[service_name]=sinfo;
// for(auto item:service_dic)
// {
// std::cout<<"服务名:"<<item.first<<std::endl;
// for(auto item2:item.second.method_dic)
// {
// std::cout<<"方法名:"<<item2.first<<std::endl;
// }·
// }
}
RpcProvider –Run() 启动Rpc服务器
首先 使用Muduo 库, 设置一个简单的echo server
主要在于OnMessage函数的设置 实现接受到信息后, 解析出服务名, 函数名, 函数参数
并进行调用相关函数 , 调用时, 传入回调函数callmeback , 回调函数callmeback中将执行结果序列化后 发回
void RpcProvider::Run(){
// 下面这句代码是错的,因为是private 只能调用其中函数,不能把它进行复制
//MrpcApplication instance = MrpcApplication::GetInstance();
// cout<<"尝试改变"<<endl;
MrpcConfig config_ins=MrpcApplication::GetInstance().getConfig();
// config_ins["abc"]="def";
std::string ip=config_ins.Load("rpcserverip");
uint16_t port=std::stoi(config_ins.Load("rpcserverport"));
// 需要地址及端口
muduo::net::InetAddress address(ip,port);
// 创建tcpserver对象
muduo::net::TcpServer server(&m_eventLoop,address,"RpcProvider");
server.setConnectionCallback(std::bind(&RpcProvider::OnConnection,this,std::placeholders::_1));
server.setMessageCallback(std::bind(&RpcProvider::OnMessage,this,std::placeholders::_1,std::placeholders::_2,std::placeholders::_3));
// 绑定链接回调和消息读写回调方法 很好地分离了网络代码和业务代码
//server.setConnectionCallback();
// 设置muduo库的线程数量
server.setThreadNum(4);
std::cout<<"Rpc start"<<" ip:"<<ip<<" port:"<<port<<std::endl;
Zookeeperutil zk;
zk.start();
std::string ip_port=ip+":"+config_ins.Load("rpcserverport");
// 注册服务
for(auto service:service_dic)
{
std::string service_path="/"+service.first;
zk.create(service_path,"",0);
for(auto func:service.second.method_dic)
{
std::string func_path=service_path+"/"+func.first;
zk.create(func_path,ip_port,0);
}
}
//启动网络服务
server.start();
m_eventLoop.loop();
//std::cout<<"hello world"<<std::endl;
}
void RpcProvider::OnConnection(const muduo::net::TcpConnectionPtr &conn)
{
}
// 当有字节流时, 会自动调用该函数
// 该函数 解析字符流 并调用相应注册的函数
void RpcProvider::OnMessage(const muduo::net::TcpConnectionPtr& conn,muduo::net::Buffer* buffer,muduo::Timestamp timestamp)
{
// 先转化为字符串
std::string buffer_str=buffer->retrieveAllAsString();
// 截取前四个字节
uint32_t len=0;
buffer_str.copy((char*)&len,4,0);
// 解析rpc_header对象
std::string rpc_header_str=buffer_str.substr(4,len);
src::RpcHeader rpcheader=src::RpcHeader();
if(!rpcheader.ParseFromString(rpc_header_str))
{
// 解析失败
std::cout<<"rpcheader解析失败"<<std::endl;
return;
}
std::string service_name=rpcheader.service_name();
std::string method_name=rpcheader.method_name();
uint32_t args_len=rpcheader.args_len();
// 找到相应的service method
if(!service_dic.count(service_name))
{
std::cout<<"服务名不存在"<<std::endl;
return ;
}
ServiceInfo service_info=service_dic[service_name];
google::protobuf::Service* service=service_info.service_ptr;
if(!service_info.method_dic.count(method_name))
{
std::cout<<"方法名不存在"<<std::endl;
return;
}
const google::protobuf::MethodDescriptor* method_des=service_info.method_dic[method_name];
// 截取 args 此时的args为request
std::string args_str=buffer_str.substr(4+len,args_len);
// 解析args ,需要获得 service method 下的request
// 直接使用基类 message即可 message是一个抽象类 不能实例化
// 因此还需要找method的方法 创建一个新的对象
google::protobuf::Message* request=service->GetRequestPrototype(method_des).New();
google::protobuf::Message* response=service->GetResponsePrototype(method_des).New();
if(!request->ParseFromString(args_str))
{
std::cout<<"解析参数失败"<<std::endl;
return;
}
// 生成回调对象
//google::protobuf:: Closure * done= google::protobuf::NewCallback<const muduo::net::TcpConnectionPtr&,google::protobuf::Message*> (callmeback,conn,response);
auto done=google::protobuf::NewCallback< RpcProvider,const muduo::net::TcpConnectionPtr& ,google::protobuf::Message* > (this,&RpcProvider::callmeback,conn,response);
// 调用该函数
service->CallMethod(method_des,nullptr,request,response,done);
}
// 需要连接, response
void RpcProvider::callmeback(const muduo::net::TcpConnectionPtr& conn,google::protobuf::Message* response)
{
// 序列化
std::string response_str;
if(!response->SerializeToString(&response_str))
{
std::cout<<"response序列化失败"<<std::endl;
return;
}
conn->send(response_str);
// 模仿http的短连接
conn->shutdown();
}
框架外层–如何调用Rpc函数
- 与调用方使用同一份.proto文件, 生成依赖代码文件
- 初始化配置类(注意: 只需要用到zookeeper的ip和port即可)
- 定义具体服务类的stub, 并传入重写的MrpcChannel()
- 准备参数, 根据stub调用相关函数
#include<iostream>#include"MrpcApplication.h"#include"MrpcChannel.h"#include"MrpcController.h"#include"user.pb.h"int main(int argc, char** argv){ // 要是想调用的话, 需要传入相关参数 ,进行配置,全局只会初始化一次 MrpcApplication::Init(argc,argv); fixbug::UserServiceRpc_Stub stub(new MrpcChannel()); // 初始化相关参数 fixbug::LoginRequest request; request.set_name("云霞川"); request.set_pwd("hch12345"); fixbug::LoginResponse response; MrpcController controller; stub.Login(&controller,&request,&response,nullptr); // 会自动调rpcchannel 用callmethod if(!controller.Failed()) { // 得到执行后的response if(!response.success()) { std::cout<<"远程rpc函数执行失败"<<std::endl; std::cout<<"errcode:"<<response.result().errcode()<<std::endl; std::cout<<"errmsg:"<<response.result().errmsg()<<std::endl; return 0; } std::cout<<"远程rpc函数执行成功"<<std::endl; std::cout<<"success: "<<response.success()<<std::endl; fixbug::HelloRequest request2; request2.set_name("云霞川"); fixbug::HelloReponse response2; stub.Hello(nullptr,&request2,&response2,nullptr); // 会自动调rpcchannel 用callmethod // 得到执行后的response std::cout<<response2.hello()<<std::endl; std::cout<<"远程rpc函数执行成功"<<std::endl; } else { std::cout<<controller.ErrorText()<<std::endl; }}
框架内层–Rpc的调用底层
MrpcChannel 重新定义callmethod
MrpcChannel.h
class MrpcChannel:public google::protobuf::RpcChannel{public: void CallMethod(const google::protobuf::MethodDescriptor* method, google::protobuf::RpcController* controller, const google::protobuf::Message* request, google::protobuf::Message* response, google::protobuf::Closure* done);};
MrpcChannel.cpp
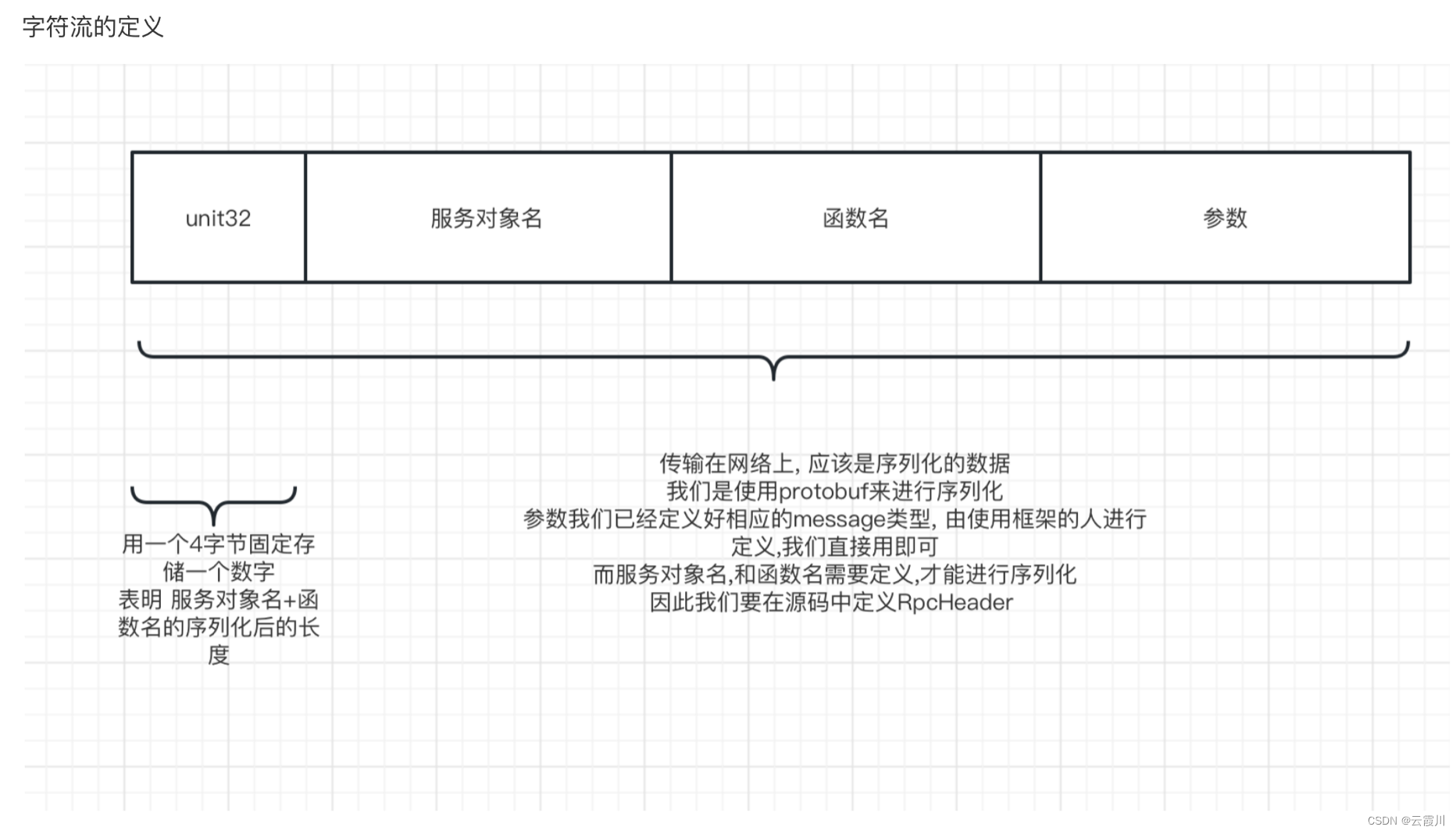
- MrpcChannel 首先准备要传输的字节流, 即应该包含信息: 服务对象名 + 函数名 + 参数
- 根据zookeeper的ip 和port , 向zookeeper查询服务名及函数名, 得到提供该服务与函数的服务器ip地址与端口
- 网络传输字节流
- 网络接收字符流, 并解析成response
void MrpcChannel::CallMethod(const google::protobuf::MethodDescriptor* method,
google::protobuf::RpcController* controller, const google::protobuf::Message* request,
google::protobuf::Message* response, google::protobuf::Closure* done)
{
//需要 得到 序列化后的字节流
// 4字节代表rpc_header长度 rpc_header args
// 先得到rpc_header
src::RpcHeader header;
// rpc_header 包含 service_name,method_name,args_len
const google::protobuf::ServiceDescriptor* service=method->service();
std::string service_name=service->name();
std::string method_name=method->name();
//args序列化 并得到长度
std::string args_str;
request->SerializeToString(&args_str);
uint32_t args_len=args_str.size();
header.set_args_len(args_len);
header.set_method_name(method_name);
header.set_service_name(service_name);
//rpc_header 序列化
std::string rpc_header_str;
header.SerializeToString(&rpc_header_str);
std::string rpc_header_len_str;
uint32_t rpc_header_len=rpc_header_str.size();
rpc_header_len_str.insert(0,std::string((char*)&rpc_header_len,4));
// 字符串都已经准备好
std::string send_str;
send_str+=rpc_header_len_str;
send_str+=rpc_header_str;
send_str+=args_str;
std::string zoo_ip=MrpcApplication::getConfig().Load("zookeeperip");
uint16_t zoo_port=stoi(MrpcApplication::getConfig().Load("zookeeperport"));
std::string zoo_str="/"+service_name+"/"+method_name;
Zookeeperutil zk=Zookeeperutil();
zk.start();
std::string ip_port=zk.getData(zoo_str);
if(ip_port.size()==0)
{
std::cout<<"未找到zookeeper"<<std::endl;
exit(EXIT_FAILURE);
}
int idx=ip_port.find_first_of(':');
std::string ip=ip_port.substr(0,idx);
uint16_t port=std::stoi(ip_port.substr(idx+1,ip_port.size()-1-idx));
std::cout<<"得到rpc服务ip:"<<ip<<std::endl;
std::cout<<"得到rpc服务端口:"<<port<<std::endl;
// // 取得ip和地址
// std::string ip=MrpcApplication::getConfig().Load("rpcserverip");
// uint16_t port=stoi(MrpcApplication::getConfig().Load("rpcserverport"));
// socket编程 发送信息
int client_sock=socket(AF_INET,SOCK_STREAM,0);
if(client_sock==-1)
{
controller->SetFailed("client_sock申请失败");
return;
}
struct sockaddr_in sock_addr;
sock_addr.sin_family=AF_INET;
sock_addr.sin_port=htons(port);
sock_addr.sin_addr.s_addr=inet_addr(ip.c_str());
if(connect(client_sock,(sockaddr*)&sock_addr,sizeof(sock_addr))<0)
{
controller->SetFailed("连接失败");
return;
}
// 发送信息
int len=0;
if(len=send(client_sock,send_str.c_str(),send_str.size(),0)<0)
{
controller->SetFailed("发送失败");
return;
}
char buf[1024]={0};
int len2=0;
if((len2=recv(client_sock,buf,1024,0))<0)
{
controller->SetFailed("接受失败");
return;
}
std::string response_str=buf;
response->ParseFromArray(buf,len2);
//std::cout<<"success: "<<std::endl;
//response->ParseFromString(response_str);
}






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结