您现在的位置是:首页 >技术交流 >如何将PyTorch模型迁移到昇腾平台网站首页技术交流
如何将PyTorch模型迁移到昇腾平台
PyTorch是业界流行的深度学习框架,用于开发深度学习训练脚本,默认运行在CPU/GPU上。为了使这些脚本能够利用昇腾AI处理器的强大算力执行训练,需要对PyTorch的训练脚本进行迁移。
首先,我们了解下模型迁移的全流程:
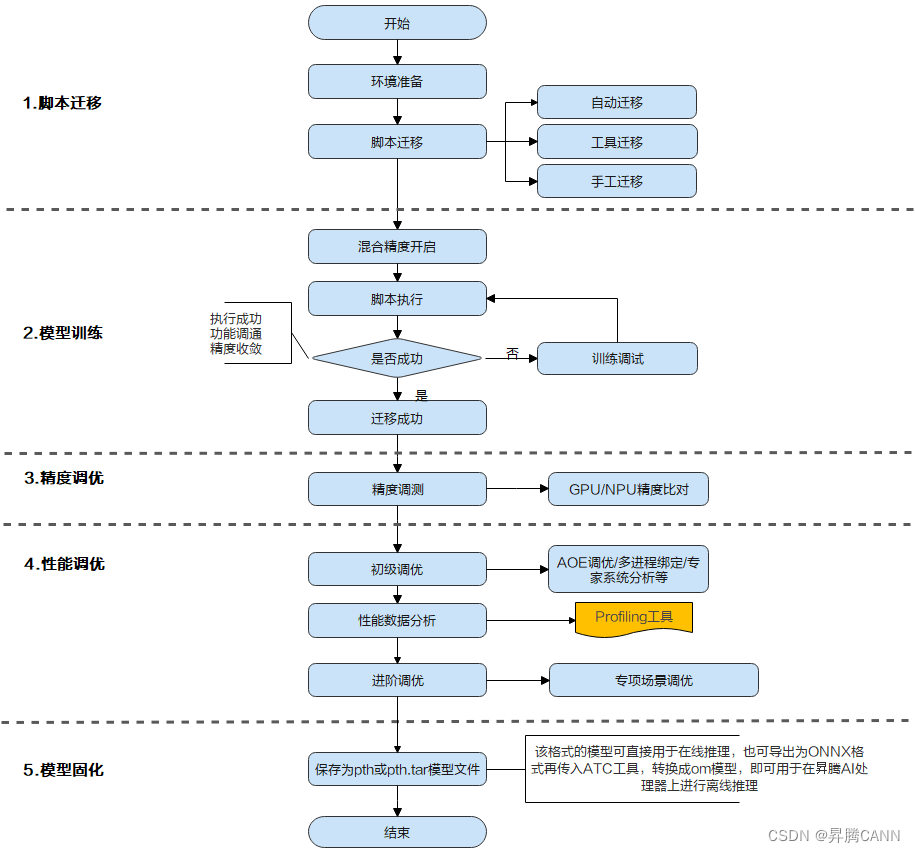
通过上图可以看出,模型迁移包括“脚本迁移 –> 模型训练 –> 精度调优 –> 性能调优 –> 模型固化”几个流程,其中:
- “脚本迁移”是对PyTorch训练脚本进行少量修改,使其可以运行在昇腾AI处理器上。目前支持自动迁移、工具迁移和手动迁移三种迁移方式,推荐使用自动迁移,用户仅需在脚本中添加一行导入训练转换库的代码即可完成PyTorch训练脚本到NPU的迁移。在迁移完成、训练开始之前,基于NPU的架构特性,用户需要开启混合精度,用于提升模型性能。
- “模型训练”是根据模型参数进行多轮训练迭代,并在训练过程中评估模型准确度,使其在训练结束时能够完成某种AI任务(例如图像识别)。
- “精度调优”与“性能调优”是在用户完成模型训练后,比对、分析模型的精度和性能是否达到用户要求,并指导用户对精度或性能进行进一步提升的操作。
- “模型固化”是将训练好的、精度性能达标的模型保存为pth或pth.tar模型文件用于在线推理,或导出为ONNX模型再通过ATC工具转换为om模型,使其可以在昇腾AI处理器上进行离线推理。
本文我们针对“脚本迁移”和“模型训练”两个阶段进行详细的介绍。
脚本迁移
将PyTorch训练脚本迁移到昇腾平台有自动迁移(推荐)、工具迁移和手工迁移三种方式。
自动迁移
在训练脚本中导入脚本转换库,然后拉起脚本执行训练。训练脚本在运行的同时,会自动将脚本中的CUDA接口替换为昇腾AI处理器支持的NPU接口。整体过程为边训练边转换。代码实现方式如下:
1. 配置环境变量。
export PYTHONPATH={CANN软件安装目录}/ascend-toolkit/latest/tools/ms_fmk_transplt/torch_npu_bridge:$PYTHONPATH2. 在训练脚本中引入以下头文件。
import torch
import torch_npu
.....
import transfer_to_npu工具迁移
训练前,通过脚本迁移工具,自动将训练脚本中的CUDA接口替换为昇腾AI处理器支持的NPU接口,并生成迁移报告(包含脚本转换日志、不支持算子的列表、脚本修改记录)。训练时,运行转换后的脚本。整体过程为先转换脚本,再进行训练。
1. 安装依赖
pip3 install pandas
pip3 install libcst # Python语法树解析器
pip3 install jedi # 用于跨文件解析,建议安装2. 进入迁移工具所在路径。
cd CANN软件安装目录/ascend-toolkit/latest/tools/ms_fmk_transplt/3. 进入分析迁移工具所在路径,执行脚本迁移任务。
./pytorch_gpu2npu.sh -i 原始脚本路径 -o 脚本迁移结果输出路径 -v 原始脚本框架版本 [-r 自定义规则json文件路径] [-s] [-sim] [-a 模型名称] [-m] [distributed -t 目标模型变量名 -m 训练脚本的入口文件]4. 脚本迁移完成后,进入脚本迁移结果输出路径查看结果文件,以GPU单卡脚本迁移为NPU多卡脚本为例:
├── xxx_msft/xxx_msft_multi // 迁移结果输出目录
│ ├── 训练脚本文件存储目录 // 与迁移前目录结构一致
│ ├── msFmkTranspltlog.txt // 脚本迁移过程日志文件
│ ├── cuda_op_list.csv //分析出的cuda算子列表
│ ├── unknown_api.csv //支持情况存疑的API列表
│ ├── unsupported_api.csv //不支持的API列表
│ ├── change_list.csv // 修改记录文件
│ ├── run_distributed_npu.sh // 多卡启动shell脚本
│ ├── ascend_function // 如果启用了自动替换不支持API功能,生成包含等价算子的目录手工迁移
手工迁移需要用户对AI模型有迁移基础,了解GPU与NPU的代码异同点。手工迁移过程中各个模型的迁移方法均有不同,下文只给出手工迁移的核心要点。
单卡迁移
1. 导入NPU相关库。
import torch
import torch_npu 2. 迁移适配GPU的模型脚本,指定NPU作为训练设备。
迁移前:
device = torch.device('cuda:{}'.format(args.gpu))迁移后:
device = torch.device('npu:{}'.format(args.gpu))3. 替换CUDA接口:将训练脚本中的CUDA接口替换为NPU接口,例如CUDA接口、模型、损失函数、数据集等迁移到NPU上。样例代码如下:
迁移前:
model.cuda(args.gpu)迁移后:
model.npu(args.gpu)多卡迁移
除单卡迁移包含的3个修改要点外,在分布式场景下,还需要切换通信方式,直接修改init_process_group的值。
修改前,GPU使用nccl方式:
dist.init_process_group(backend='nccl',init_method = "tcp//:127.0.0.1:**", ...... ,rank = args.rank)修改后,NPU使用hccl方式:
dist.init_process_group(backend='hccl',init_method = "tcp//:127.0.0.1:**", ...... ,rank = args.rank)**为端口号,根据实际选择一个闲置端口填写。
混合精度开启
混合精度训练是在训练时混合使用单精度(float32)与半精度(float16)数据类型,将两者结合在一起,并使用相同的超参数实现了与float32几乎相同的精度。在迁移完成、训练开始之前,基于NPU芯片的架构特性,用户需要开启混合精度,可以提升模型的性能。推荐用户使用PyTorch1.8.1及以上版本框架内置的AMP功能模块来使能混合精度训练。在典型模型训练场景中,代码实现方式如下。
1. 在构建神经网络前,我们需要导入torch_npu中的AMP模块。
import time
import torch
import torch.nn as nn
import torch_npu
from torch_npu.npu import amp # 导入AMP模块2. 在模型、优化器定义之后,定义AMP功能中的GradScaler。
model = CNN().to(device)
train_dataloader = DataLoader(train_data, batch_size=batch_size) # 定义DataLoader
loss_func = nn.CrossEntropyLoss().to(device) # 定义损失函数
optimizer = torch.optim.SGD(model.parameters(), lr=0.1) # 定义优化器
scaler = amp.GradScaler() # 在模型、优化器定义之后,定义GradScaler3. 在训练代码中添加AMP功能相关的代码开启AMP。
for epo in range(epochs):
for imgs, labels in train_dataloader:
imgs = imgs.to(device)
labels = labels.to(device)
with amp.autocast():
outputs = model(imgs) # 前向计算
loss = loss_func(outputs, labels) # 损失函数计算
optimizer.zero_grad()
# 进行反向传播前后的loss缩放、参数更新
scaler.scale(loss).backward() # loss缩放并反向传播
scaler.step(optimizer) # 更新参数(自动unscaling)
scaler.update() # 基于动态Loss Scale更新loss_scaling系数模型训练
迁移成功后的脚本可在昇腾AI处理器上执行单卡训练,也可以在多卡上执行分布式训练。
执行训练前用户需要确保已经完成CANN基础环境变量的配置,并已经将数据集上传到运行环境中。
1. 配置训练相关环境变量。
新建环境变量shell脚本env.sh,写入以下代码并执行:
#将Host日志输出到串口,0-关闭/1-开启
export ASCEND_SLOG_PRINT_TO_STDOUT=0
#多机多卡训练时,自动获取IP环境变量
export HCCL_IF_IP=$(hostname -I |awk '{print $1}')
#配置PyTorch框架环境变量
ulimit -SHn 512000
path_lib=$(python3.7 -c """
import sys
import re
result=''
for index in range(len(sys.path)):
match_sit = re.search('-packages', sys.path[index])
if match_sit is not None:
match_lib = re.search('lib', sys.path[index])
if match_lib is not None:
end=match_lib.span()[1]
result += sys.path[index][0:end] + ':'
result+=sys.path[index] + '/torch/lib:'
print(result)"""
)
echo ${path_lib}
export LD_LIBRARY_PATH=/usr/local/python3.7.5/lib/:${path_lib}:$LD_LIBRARY_PATH2. 拉起训练脚本。
单卡训练示例:
python3 main.py /home/data/resnet50/imagenet --batch-size 128 --lr 0.1 --epochs 90 --arch resnet50 --world-size 1 --rank 0 --workers 40 --momentum 0.9 --weight-decay 1e-4 --gpu 0多卡分布式训练示例:
python3 main.py /home/data/resnet50/imagenet --workers 160 --lr 0.8 --arch resnet50 --dist-url 'tcp://127.0.0.1:**' --dist-backend 'hccl' --multiprocessing-distributed --world-size 1 --batch-size 2048 --epochs 90 --rank 0 --amp--dist-url:为多卡训练时使用的端口号,配置为任一空闲端口号即可。
--amp:代表开启混合精度,仅多卡训练时需要显示开启,单卡训练时已默认开启。
3. 查看训练后是否生成权重文件,生成了如下图模型文件则说明迁移训练成功。

以上就是PyTorch模型迁移训练的相关知识点,更多详细操作可参见“昇腾文档中心”,您也可以在“昇腾社区在线课程”板块学习视频课程,学习过程中的任何疑问,都可以在“昇腾论坛”互动交流!
相关参考:
[1]昇腾文档中心
[2]昇腾社区在线课程
[3]昇腾论坛






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结