您现在的位置是:首页 >技术教程 >【论文阅读公式推导1】连续体机器人的哈密尔顿动力学推导网站首页技术教程
【论文阅读公式推导1】连续体机器人的哈密尔顿动力学推导
推导了一下论文哈密尔顿原理的表达,原论文的计算公式是对的,记录一下。
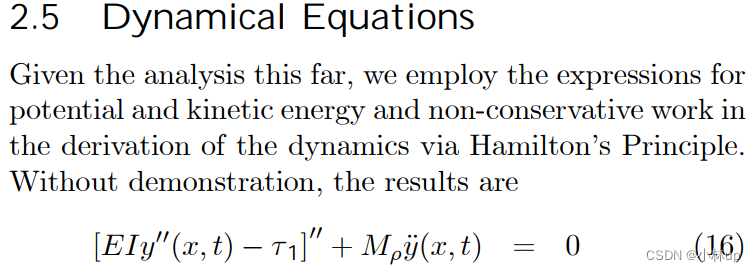
哈密尔顿原理的公式:
δ ∫ t 0 t 1 ( K E − P E + W e ) d t = 0 deltaint_{t_0}^{t_1} (KE-PE+W_e)dt=0 δ∫t0t1(KE−PE+We)dt=0
其中 K E KE KE是动能, P E PE PE是势能, W e W_e We是非保守力的功。
如果按照达朗贝尔原理可以把势能 P E PE PE转换为保守力做的功 W c W_c Wc。其中势能 P E PE PE变换为功要加个负号。
− P E = W c -PE=W_c −PE=Wc
这样和非保守力做的功 W e W_e We合并为外力的功 W W W。
W = W c + W e W=W_c+W_e W=Wc+We
δ ∫ t 0 t 1 ( K E + W ) d t = 0 deltaint_{t_0}^{t_1} (KE+W)dt=0 δ∫t0t1(KE+W)dt=0
其中势能 P E PE PE变换为功要加个负号。
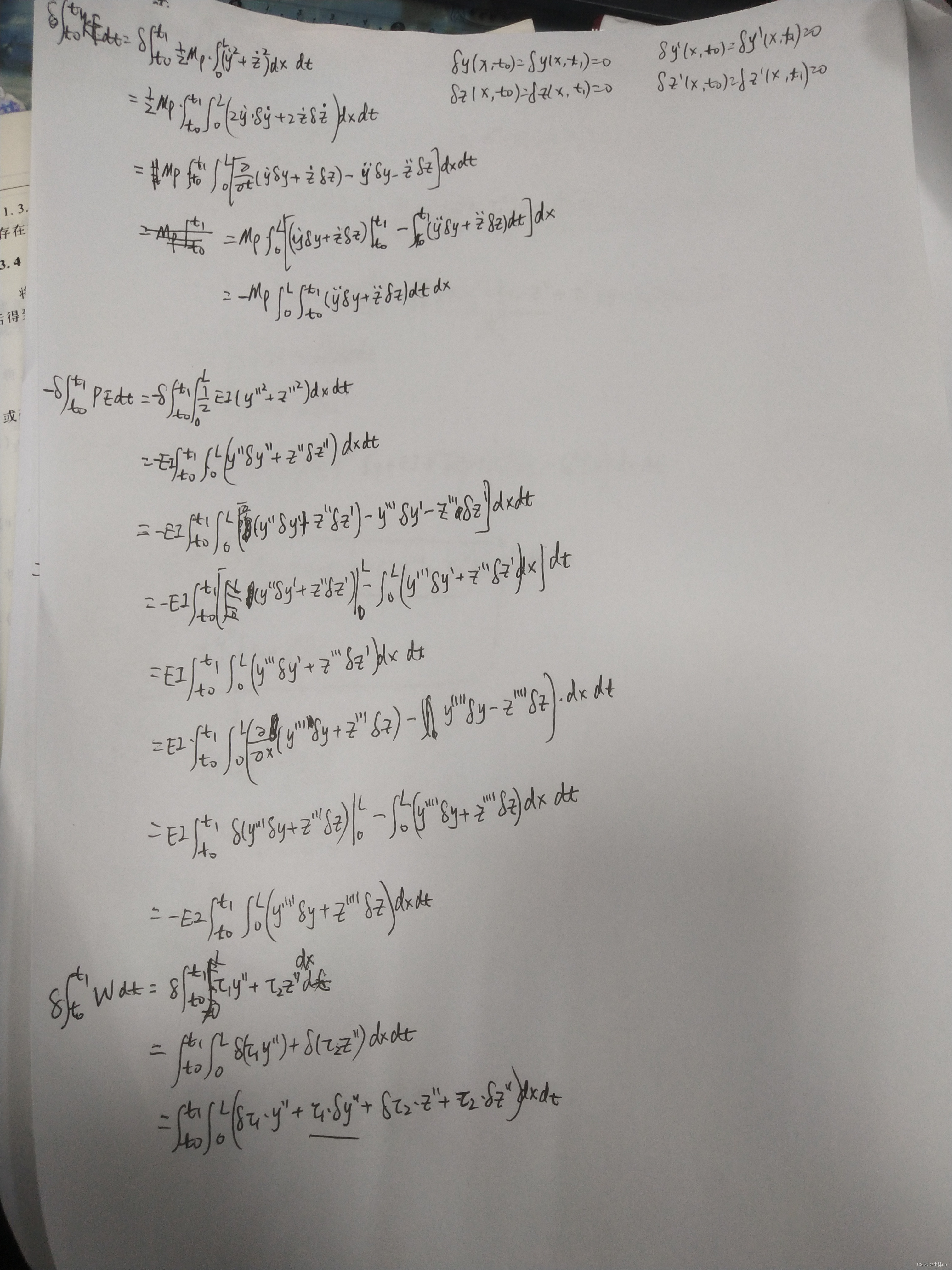
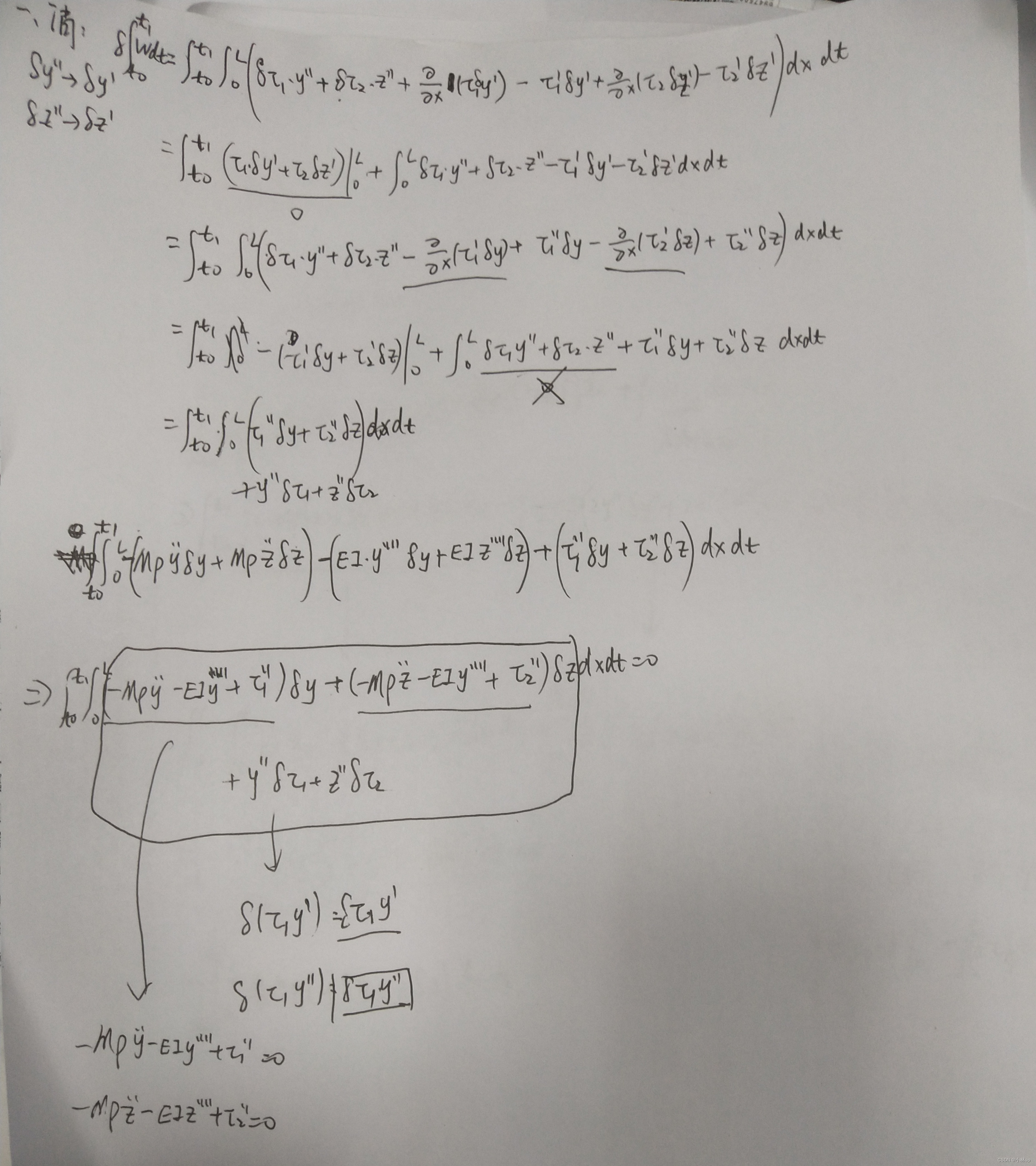
求解的过程使用了变分法,参考了叶敏《分析力学》134页关于连续体在哈密顿动力学的应用的例5-5。
求解过程的思路:
- 要不断分离出变分负号,利用边值条件都为0(等时变分):
- δ y ( x , t 0 ) = δ y ( x , t 1 ) = 0 delta{y(x,t_0)}=delta y(x,t_1)=0 δy(x,t0)=δy(x,t1)=0
- 其导数也是一样的为0。
- 分离的方法是分部积分法,将变分负号的求导阶数不断降低。如
y ˙ ∂ ∂ t ( δ y ) = ∂ ∂ t ( y ˙ δ y ) − y ¨ δ y dot{y}frac{partial}{partial t}({delta y})=frac{partial}{partial t}(dot{y}delta y)-ddot{y}delta y y˙∂t∂(δy)=∂t∂(y˙δy)−y¨δy






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结