您现在的位置是:首页 >技术杂谈 >基于双分支残差结构的低光照图像增强研究与应用实现网站首页技术杂谈
基于双分支残差结构的低光照图像增强研究与应用实现
1.摘要
在低光条件下拍摄的照片会因曝光不足而产生一系列的视觉问题,如亮度低、信息丢失、噪声和颜色失真等。为了解决上述问题,提出一个结合注意力的双分支残差低光照图像增强网络。首先,采用改进InceptionV2提取浅层特征;其次,使用残差特征提取块(RFB)和稠密残差特征提取块(DRFB)提取深层特征;然后,融合浅层和深层特征,并将融合结果输入亮度调整块(BAM)调整亮度,最终得到增强图像,该模型整体命名为双分支残差网络(Dual-branch Residual Network for lowlight image enhancement, DR-Net)。实验结果表明,在LOL(LOw-Light)数据集上,所实现的网络模型能够在提高低光照图像亮度的同时降低噪声,减少了颜色失真和伪影,得到的增强图像更加清晰自然。
2.数据集介绍
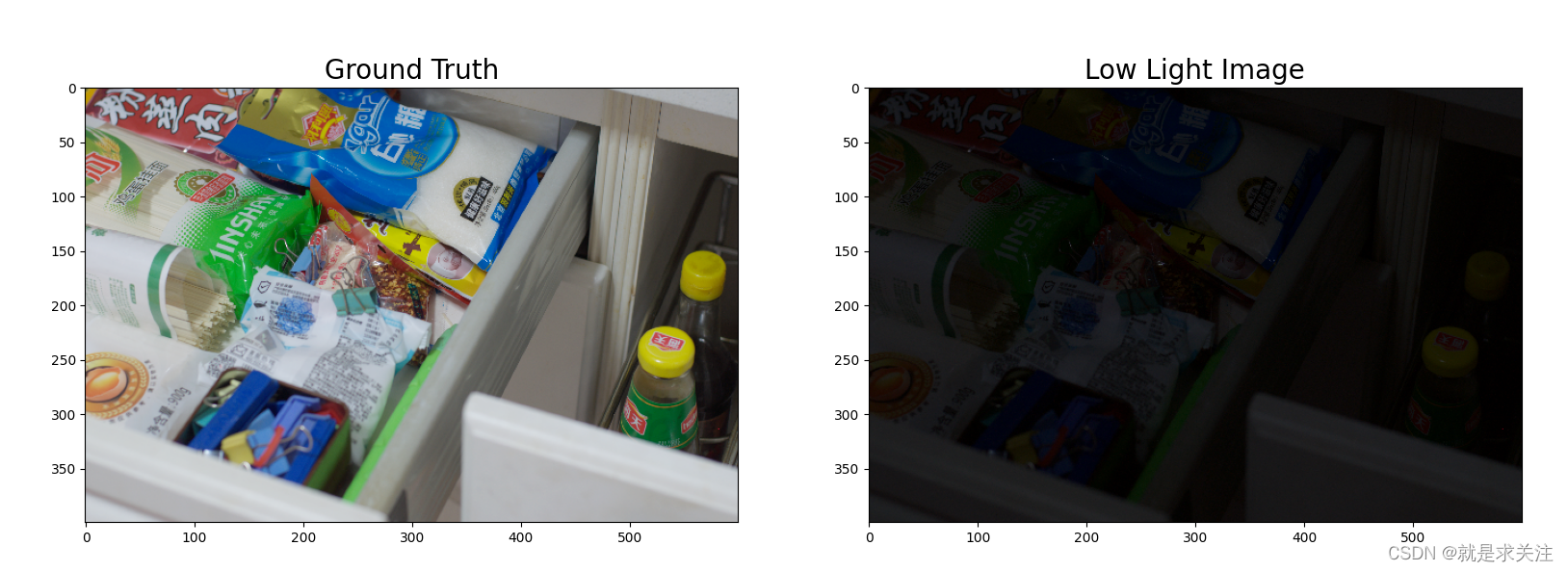
LOL数据集是用于低光照图像增强的一个常用数据集。它是由Yue et al.在2015年发布的,用于评估低光照图像增强算法的性能。LOL数据集包含485对低光照图像和对应的正常光图像。每对图像都是在相同的场景下采集的,其中一张图像是低光照条件下的原始图像,另一张是由人工调整亮度和对比度后的正常光图像。LOL数据集的图像覆盖了各种场景和对象,包括室内和室外环境、自然风景、人物肖像等。这使得LOL数据集成为评估低光照图像增强算法的重要基准。数据展示如下:
3.模型设计与实现
设计了用于低光照图像增强的双分支残差网络(Dual-branch Residual Network for lowlight image enhancement, DR-Net)。 该 网 络 采 用 改 进InceptionV2提取浅层特征,使用残差特征提取块(Residual Feature extraction Block, RFB)和 残 差 稠 密 特 征 提 取 块(Dense RFB,DRFB)两个分支进一步提取深层特征,然后将得到的特征信息融合,解决了图像细节丢失和偏色的问题。再 将 融 合 结 果 送 入 亮 度 调 整 块(Brightness AdjustmentModule, BAM)进行增亮调节,最终得到正常光图像。DRA-Net的结构如图所示,主要由浅层特征提取、深层特征提取、特征融合和亮度调整这 4个部分组成。

实现的代码如下:
# 定义DR-Net网络结构
inputs = keras.Input(shape=(None, None, 3), name='img')
# 浅层特征提取,使用改进InceptionV2
x = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(inputs)
x = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(x)
x = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(x)
# 残差特征提取块(RFB)
rfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(x)
rfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(rfb)
rfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(rfb)
# 残差稠密特征提取块(DRFB)
drfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(x)
drfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(drfb)
drfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(drfb)
drfb = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(drfb)
# 特征融合块(FFM)
ffm = layers.Concatenate()([rfb, drfb])
ffm = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(ffm)
ffm = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(ffm)
# BAM块
bam = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(ffm)
bam = layers.Conv2D(64, (3, 3), strides=(1, 1), padding='same', activation='relu')(bam)
bam = layers.Conv2D(3, (3, 3), strides=(1, 1), padding='same', activation='relu')(bam)
outputs = layers.Add()([inputs, bam])
# 创建DR-Net模型
model = keras.Model(inputs, outputs)下面是代码的详细解释:
-
定义输入层:使用
keras.Input创建一个输入层,输入的形状为(None, None, 3),表示任意大小的RGB图像。 -
浅层特征提取(Improved InceptionV2):通过三个卷积层,分别使用64个3x3的卷积核和ReLU激活函数,对输入进行特征提取。这一部分用于提取图像的浅层特征。
-
残差特征提取块(RFB):这是一个残差结构,通过三个卷积层,每个卷积层使用64个3x3的卷积核和ReLU激活函数,对浅层特征进行进一步的特征提取。
-
残差稠密特征提取块(DRFB):类似于RFB块,这也是一个残差结构,通过四个卷积层,每个卷积层使用64个3x3的卷积核和ReLU激活函数,对浅层特征进行更深层次的特征提取。
-
特征融合块(FFM):使用Concatenate层将RFB块和DRFB块的特征进行融合,然后通过两个卷积层,每个卷积层使用64个3x3的卷积核和ReLU激活函数,进一步提取融合后的特征。
-
BAM块(Brightness Adjustment Module):通过三个卷积层,分别使用64个3x3的卷积核和ReLU激活函数,对特征进行亮度调整。
-
输出层:使用Add层将输入层和BAM块的输出相加,得到最终的增强图像。
-
创建模型:使用
keras.Model创建DR-Net模型,指定输入层和输出层。
在LOL数据集上的实验过程如下:
Epoch 1/20
24/24 [==============================] - 1s 21ms/step - loss: 0.1123
Epoch 2/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0591
Epoch 3/20
24/24 [==============================] - 0s 21ms/step - loss: 0.0442
Epoch 4/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0570
Epoch 5/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0540
Epoch 6/20
24/24 [==============================] - 0s 21ms/step - loss: 0.0467
Epoch 7/20
24/24 [==============================] - 1s 22ms/step - loss: 0.1179
Epoch 8/20
24/24 [==============================] - 1s 22ms/step - loss: 0.0477
Epoch 9/20
24/24 [==============================] - 0s 21ms/step - loss: 0.0414
Epoch 10/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0227
Epoch 11/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0387
Epoch 12/20
24/24 [==============================] - 0s 21ms/step - loss: 0.0550
Epoch 13/20
24/24 [==============================] - 1s 22ms/step - loss: 0.0324
Epoch 14/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0386
Epoch 15/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0215
Epoch 16/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0166
Epoch 17/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0187
Epoch 18/20
24/24 [==============================] - 0s 21ms/step - loss: 0.0223
Epoch 19/20
24/24 [==============================] - 1s 21ms/step - loss: 0.0285
Epoch 20/20
24/24 [==============================] - 1s 21ms/step - loss: 0.02274.应用展示
实现了一个基于GUI的图像增强应用程序。使用load_model函数加载预先训练好的模型文件('model.h5'),该模型用于图像增强。通过模型对图像进行预测,并根据预测结果和输入图像进行像素级别的操作,以实现增强效果。
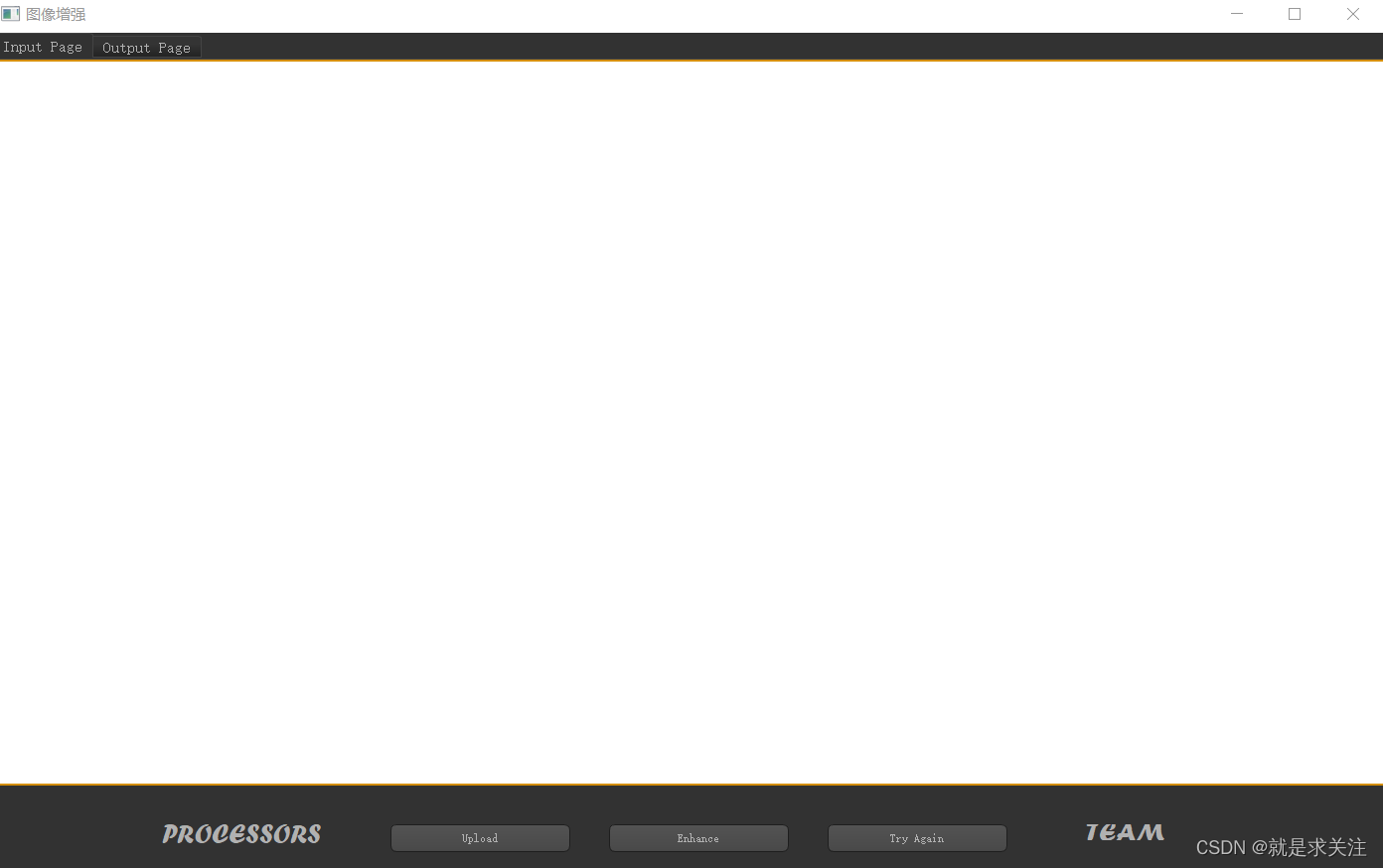
完成的用户展示界面实现了一个用户友好的图像增强应用程序,用户可以通过界面上传图像文件并进行低光照图像增强操作。应用程序使用预训练的模型进行图像增强,并提供保存增强后图像和重新选择图像的功能。整个应用程序的逻辑由GUI界面和代码实现之间的交互完成。
其界面如下:
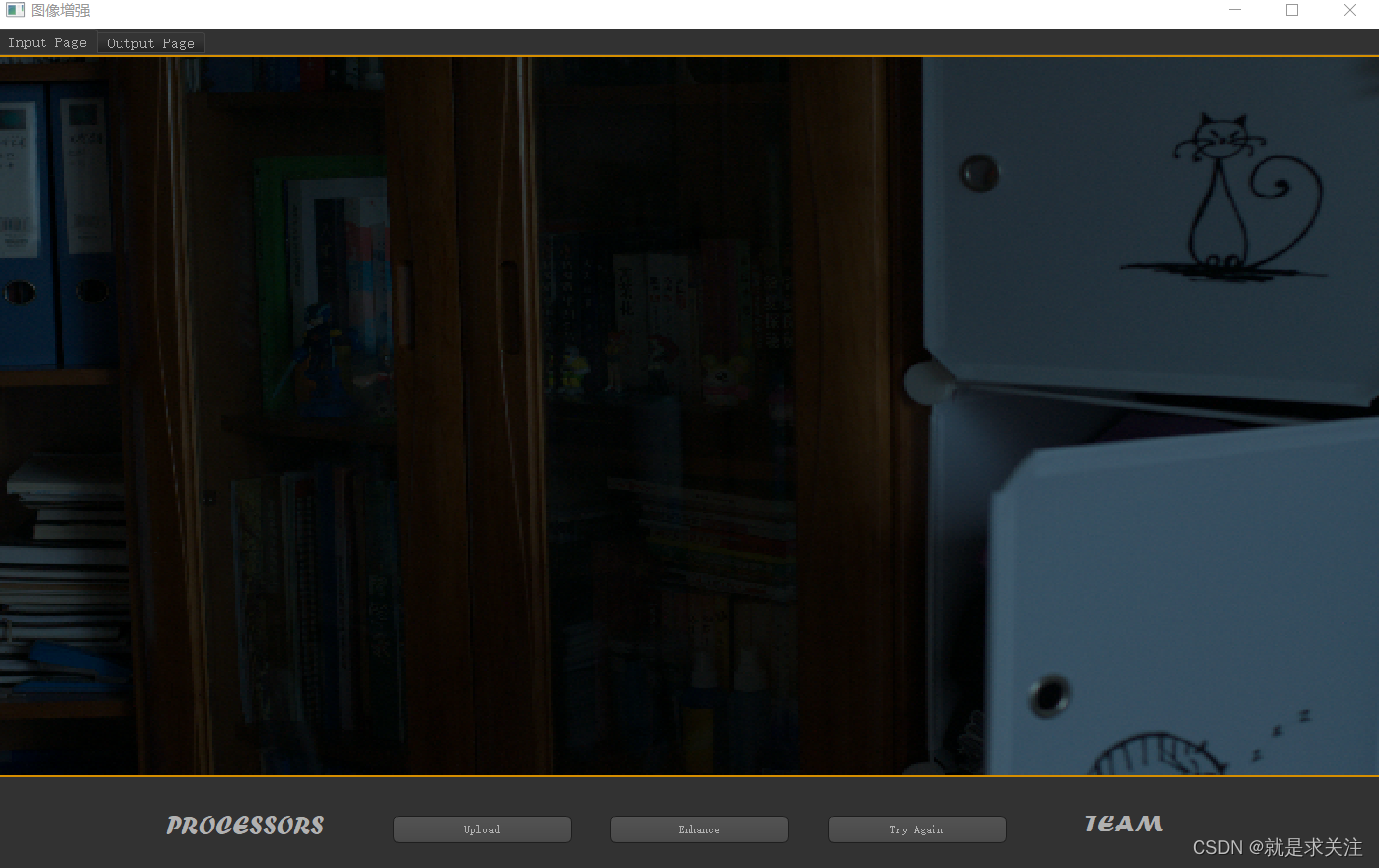
上传一个低光照的图像:
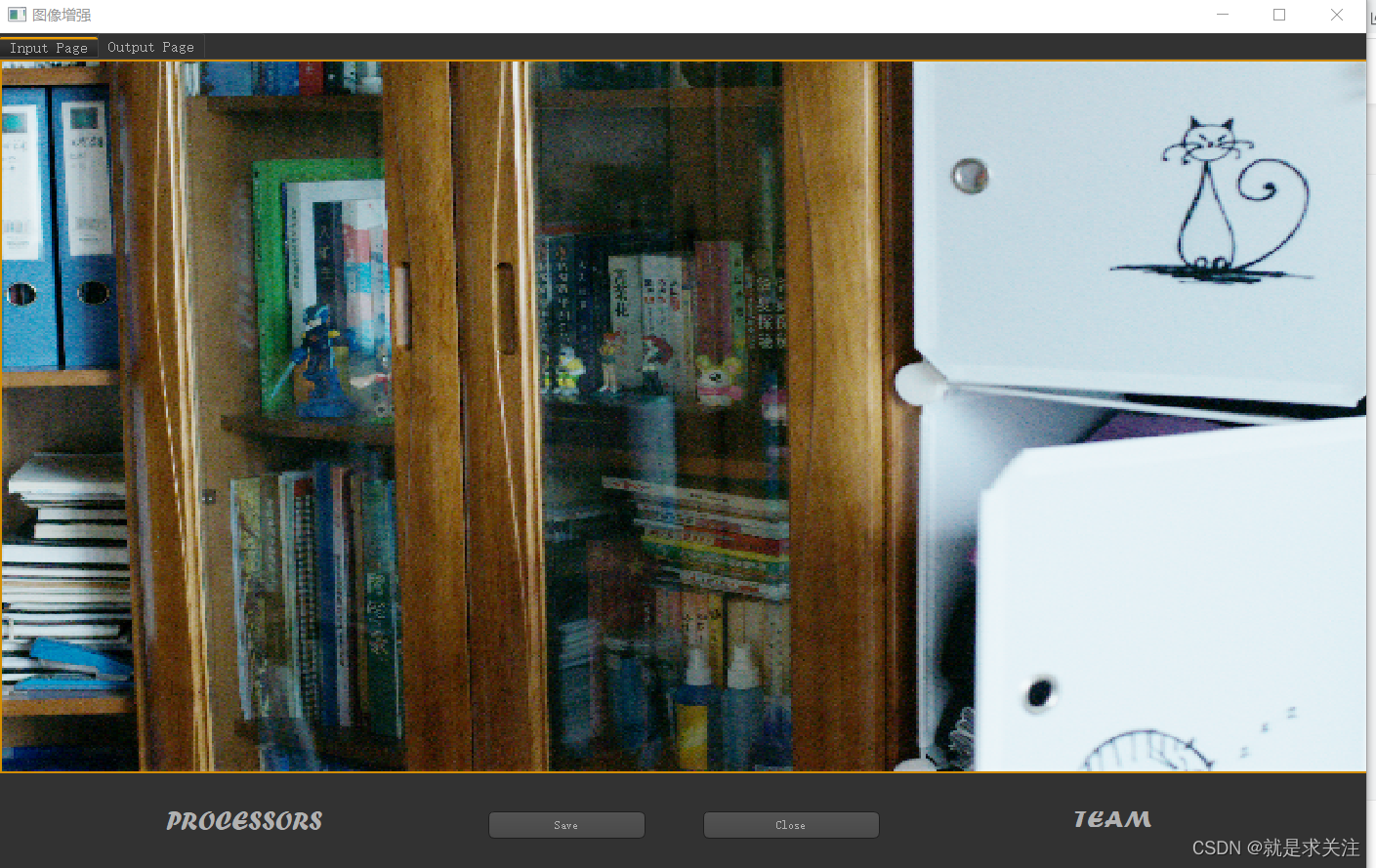
开始进行图像亮度增强,输出结果为:
5.总结
该内容介绍了图像增强算法——双分支残差网络(DR-Net),用于解决低光照图像的亮度低、颜色失真和信息丢失等问题。以下是论文的主要贡献和实验结果:
-
算法结构:DR-Net采用了改进的InceptionV2与双分支残差来提取特征信息。浅层特征提取使用改进的InceptionV2,深层特征提取使用残差特征提取块(RFB)和残差稠密特征提取块(DRFB)。特征融合块(FFM)用于捕获和融合重要特征。亮度调整块(BAM)用于调整图像亮度。
-
实验结果:作者在真实低光照和合成低光照图像上进行了对比实验。实验结果表明,DR-Net算法在增加图像亮度、还原图像颜色和减少噪声方面都优于其他对比算法。无论是在主观视觉效果还是客观评价指标上,DR-Net都表现出较好的性能。
-
应用实现:使用
load_model函数加载预先训练好的模型文件('model.h5'),完成的用户展示界面实现了一个用户友好的图像增强应用程序,用户可以通过界面上传图像文件并进行低光照图像增强操作。 -
未来展望:作者提出了进一步优化网络结构和扩充数据集的研究方向,以进一步提高低光照图像增强算法的性能。
总的来说,该内容提出的DR-Net算法通过结合改进的InceptionV2、双分支残差、特征融合和亮度调整等模块,有效解决了低光照图像的亮度、颜色和噪声等问题,并在实验中展现了良好的性能。未来的研究方向包括网络结构优化和数据集扩充,以进一步提升算法的性能。
完整代码链接:






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结