您现在的位置是:首页 >学无止境 >基础篇010.2 STM32驱动RC522 RFID模块之二:STM32硬件SPI驱动RC522网站首页学无止境
基础篇010.2 STM32驱动RC522 RFID模块之二:STM32硬件SPI驱动RC522
目录
基础篇010.1 STM32驱动RC522 RFID模块之一:基础知识
基础篇010.1 STM32驱动RC522 RFID模块之一:基础知识
本实验的RFID信息显示是通过串口实现的,关于串行通信请参考博文:
关于RFID基础知识,请参考博文:
基础篇010.1 STM32驱动RC522 RFID模块之一:基础知识
1. 实验硬件及原理图
1.1 RFID硬件
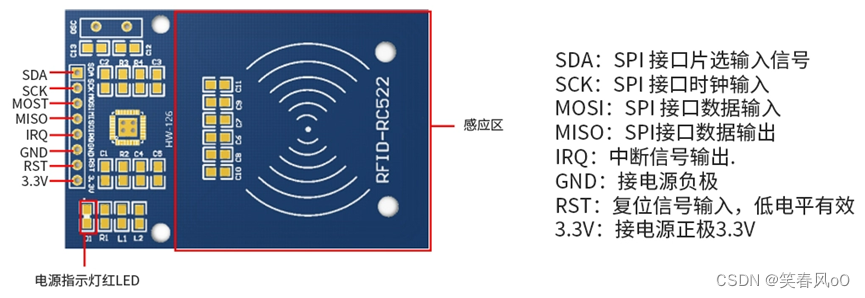
本实验使用的RFID-RC522模块采用MFRC522芯片,SPI通讯方式,支持Mifarel S50、S70 、Pro、Desfire等类型的卡,附带的白卡和钥匙扣是S50卡,每张卡都有自己的标识(UID)。

图1
1.2 硬件原理图
(1)MC522原理图
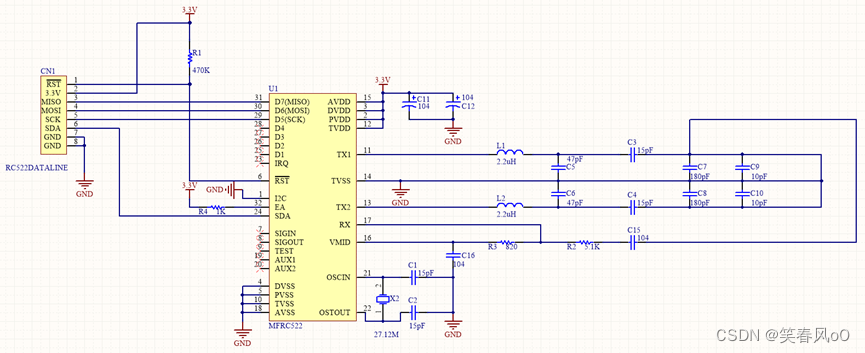
图2
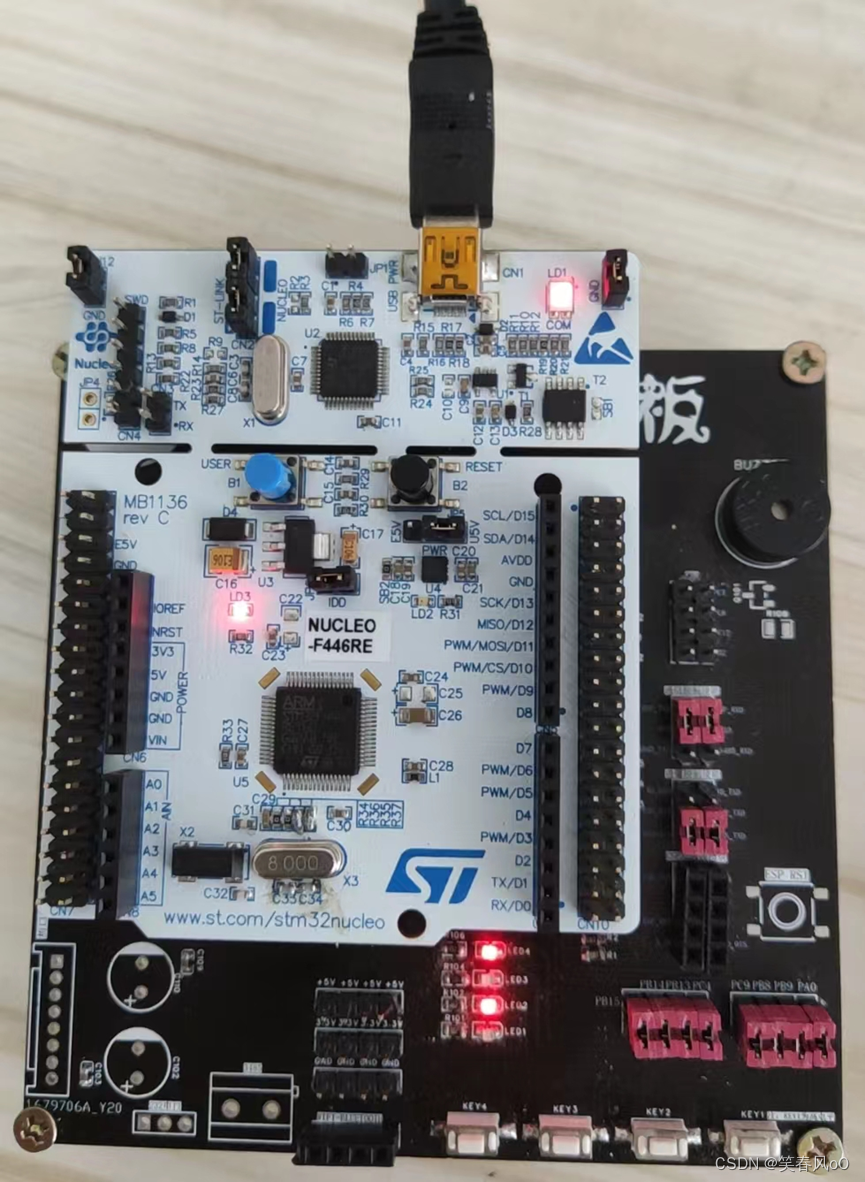
(2)STM32F446RE Nucleo-64开发板原理图
核心板原理图:
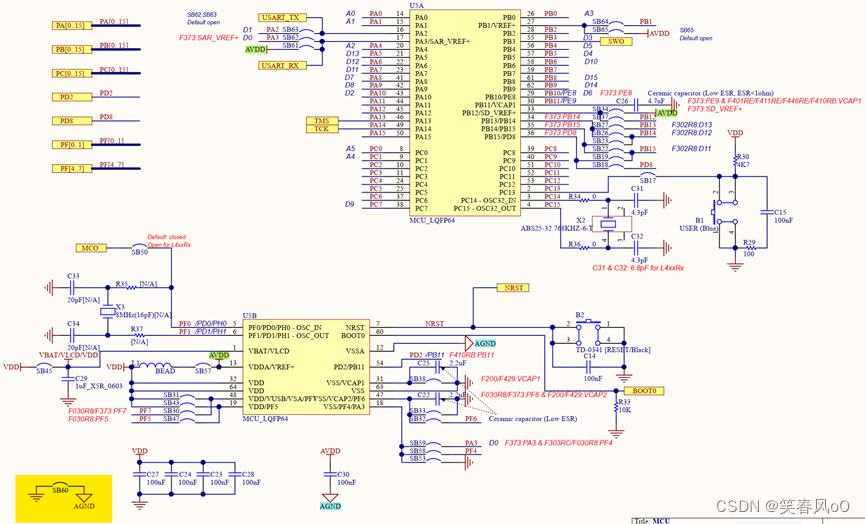
图3
核心板自带的ST-Link原理图:
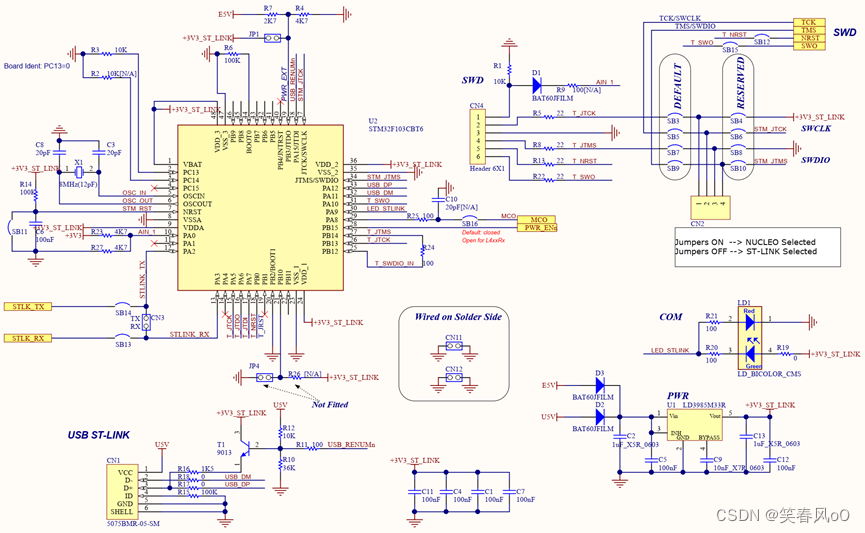
图4
核心板接口:
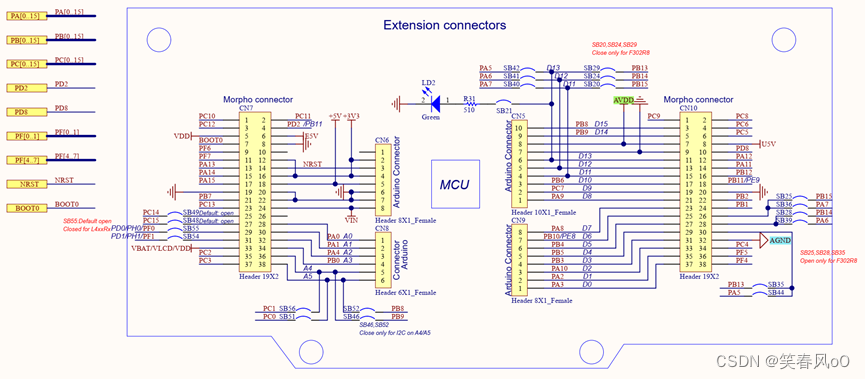
图5
底板原理图:
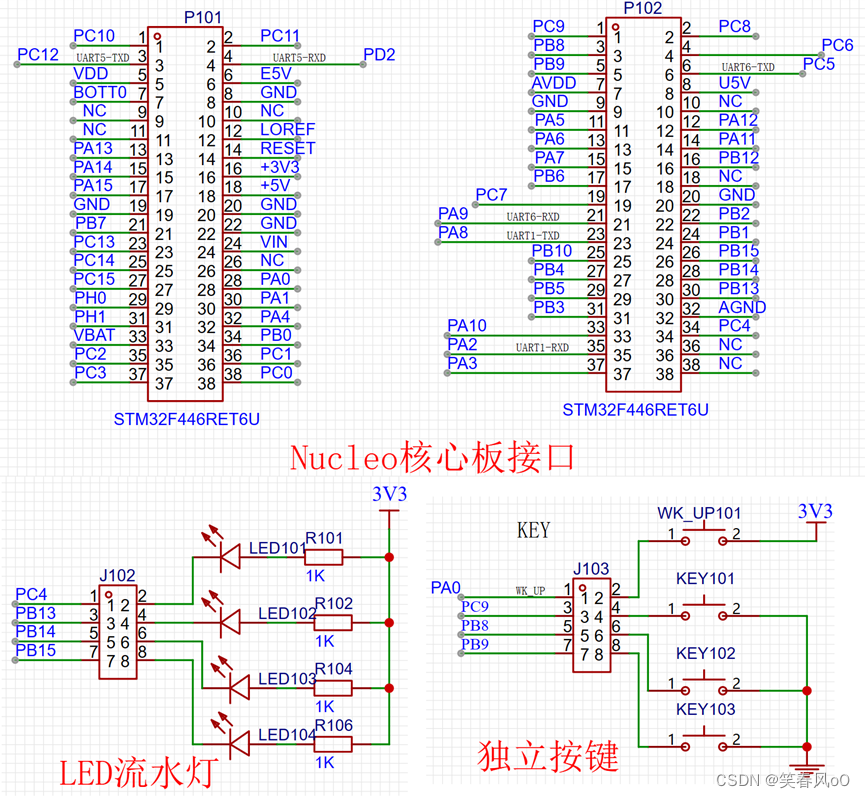
图6
(3)STM32与RC522模块的接口连接
//! Nucleo-F446RE与RC522接口定义
//SPI2_SCK PB10---(接Arduino D6)
//SPI2_MISO PC2----(接CN7左下2)
//SPI2_MOSI PC1----(接Arduino A4)
//RCC522_RST(CE) PC7----(接Arduino D9)
//RCC522_NSS(SDA) PB6----(接Arduino D10)
//RCC522_IRQ 悬空
2. 单片机与RFID硬件模块分析
可实现各种不同主机接口的功能:
- SPI接口
- 串行UART(类似 RS232,电压电平取决于提供的管脚电压)
- I2C接口
RC522是一款高度集成的非接触式(13.56MHz)读写卡芯片。它采用了NXP公司的MFRC522为核心的处理芯片,此发送模块利用调制和解调的原理,支持各种非接触式的通信协议。RC522是采用的一种先进的RFID(Radio Fequency Identification,中文为无线射频识别)通信技术。其工作原理其实很简单:IC/ID磁卡进入到磁场后,接受读写器发出的射频信号,凭借感应电流所获得的能量发送出存储在芯片中的产品信息,读写器读取到信息并解码后,送至处理单元进行数据处理。
RC522模块引脚说明:
| 编号 | 名称 | 说明 |
| 1 | VCC | 电源正 |
| 2 | RST | 复位 |
| 3 | IRQ | 中断信号 |
| 4 | GND | 地线 |
| 5 | MISO | 主进从出数据引脚 |
| 6 | MOSI | 从进主出数据引脚 |
| 7 | SCK | 时钟 |
| 8 | SDA | 片选 |
分析上面图2和图3可知,Nucleo-446RE开发板中的核心芯片与板载ST-Link芯片U2的串行通信,连接的是串口2。ST-Link与电脑采用的是ST USB虚拟串口通信。在windows中,串口驱动可以自行加载。本实验可以采用SPI方式实现单片机与RC522模块的通信。
STM32采用硬件SPI2时,使用的接口是PB10、PC2、PC1。
3. 利用STM32CubeMX创建MDK工程
3.1 STM32CubeMX工程创建
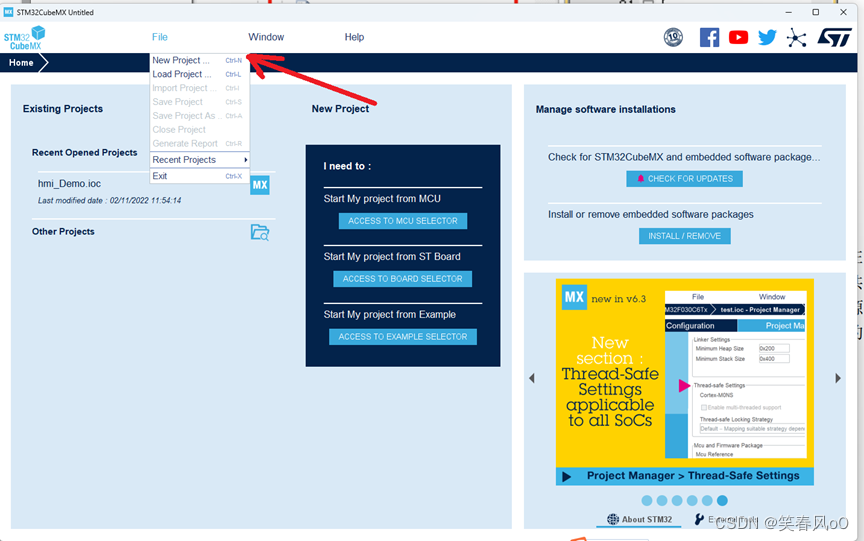
选择File下的New Project:
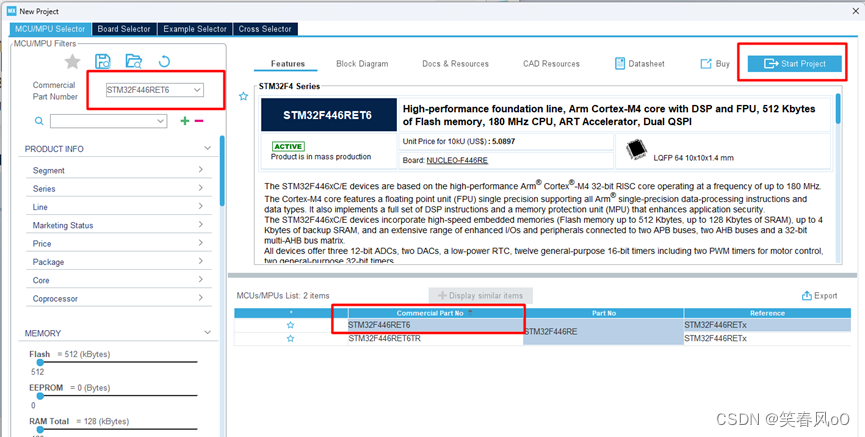
选择芯片类型(本文为STM32F446RET6),选择下边的item,然后Start Project:
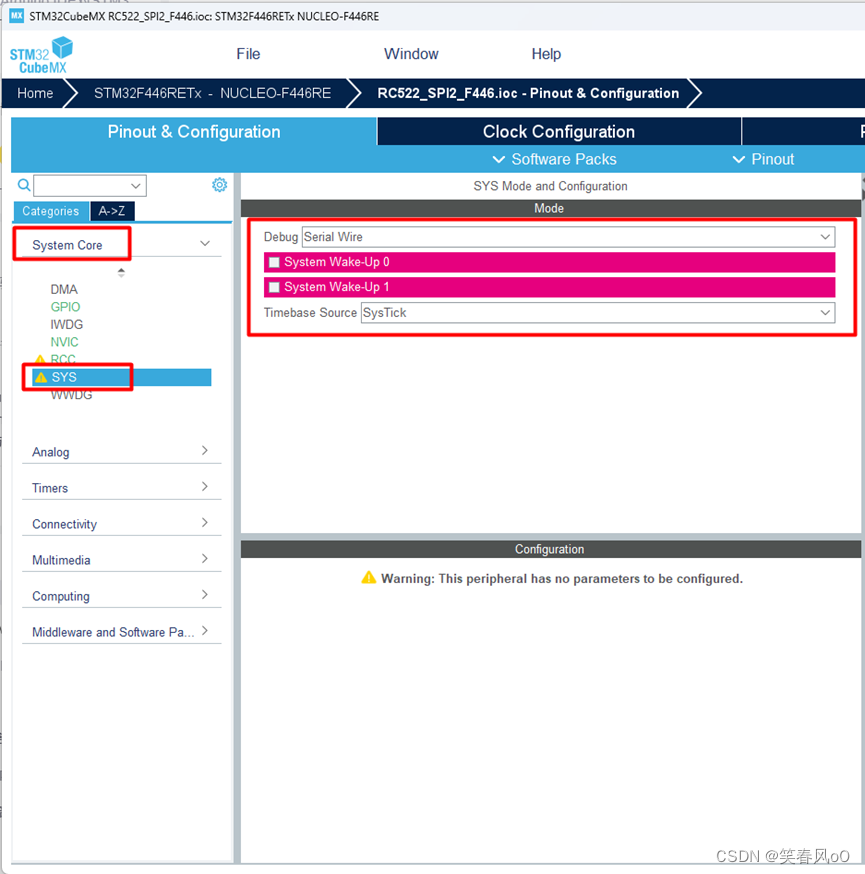
3.2 配置调试方式
点击左侧的System Core下的SYS,将Debug设置为Serial Wire:
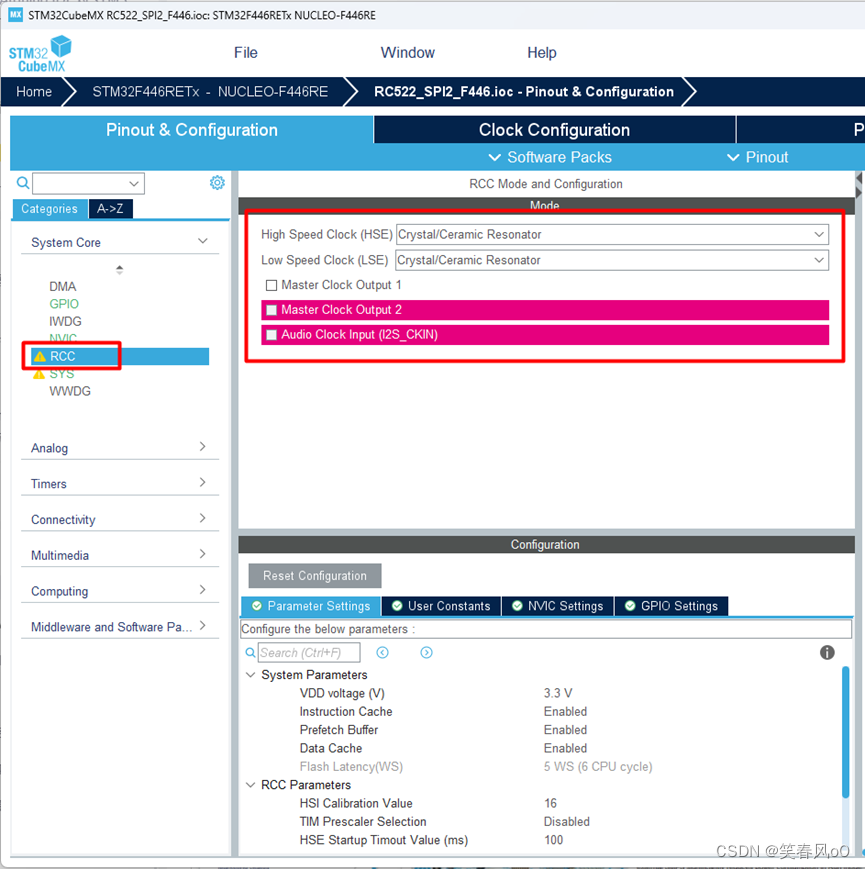
3.3 配置时钟电路
配置时钟:将RCC下的HSE设置为Crystal/Ceramic Resonator
3.4 配置时钟
Nucleo-446RE开发板:
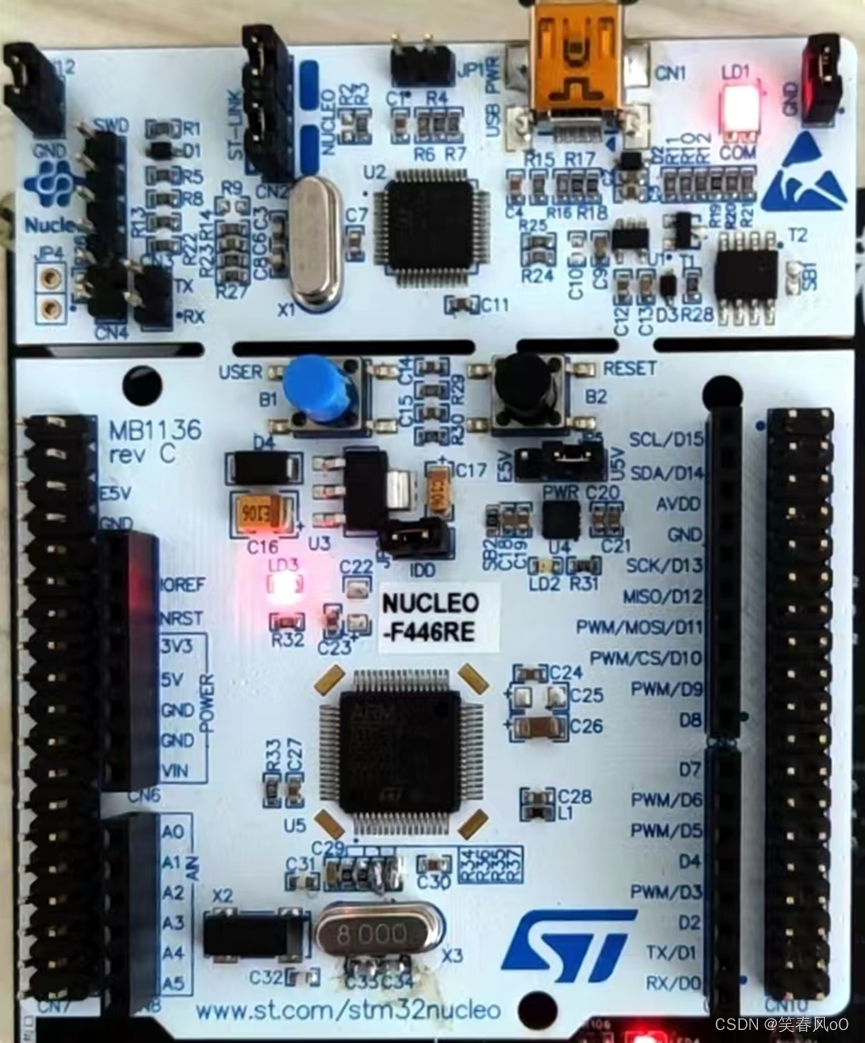
请结合开发版的硬件电路,从下面两种方式中二选一,选择第二种方式时,开发板中需要焊接相应元件(X3、C33、C34、R35、R37),或者你不能确定振荡电路,直接选第一种方式吧。
在STM32CubeMX中,做如下配置:
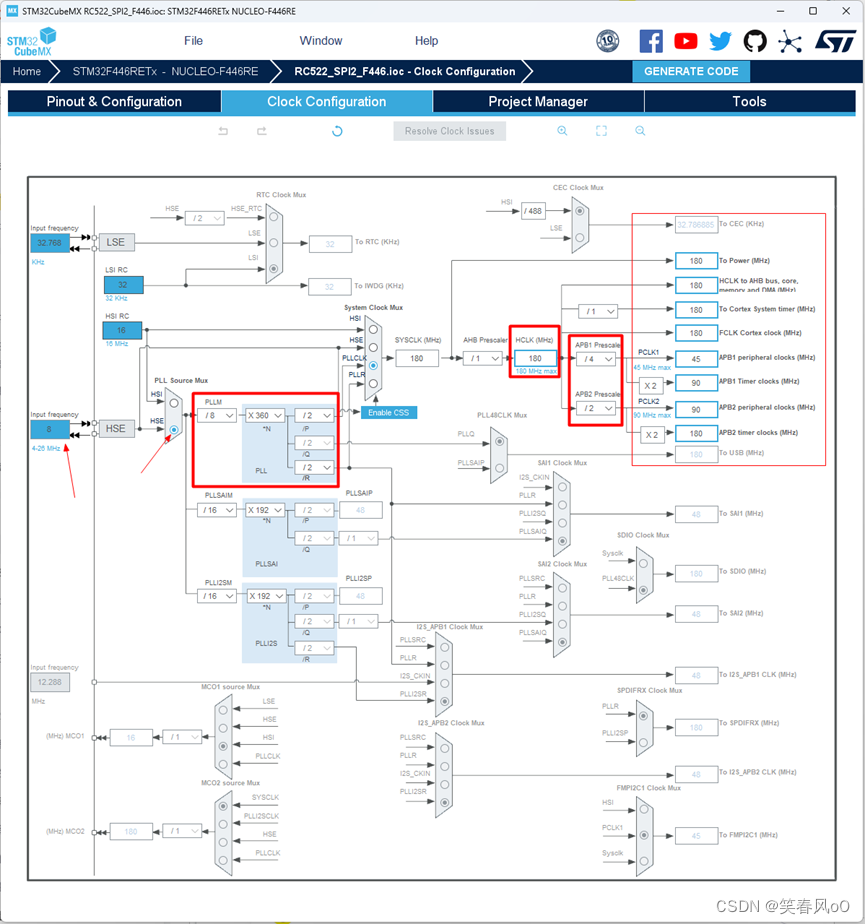
(1)采用内部8MHz时钟时选择Clock Configuration,做如下配置:
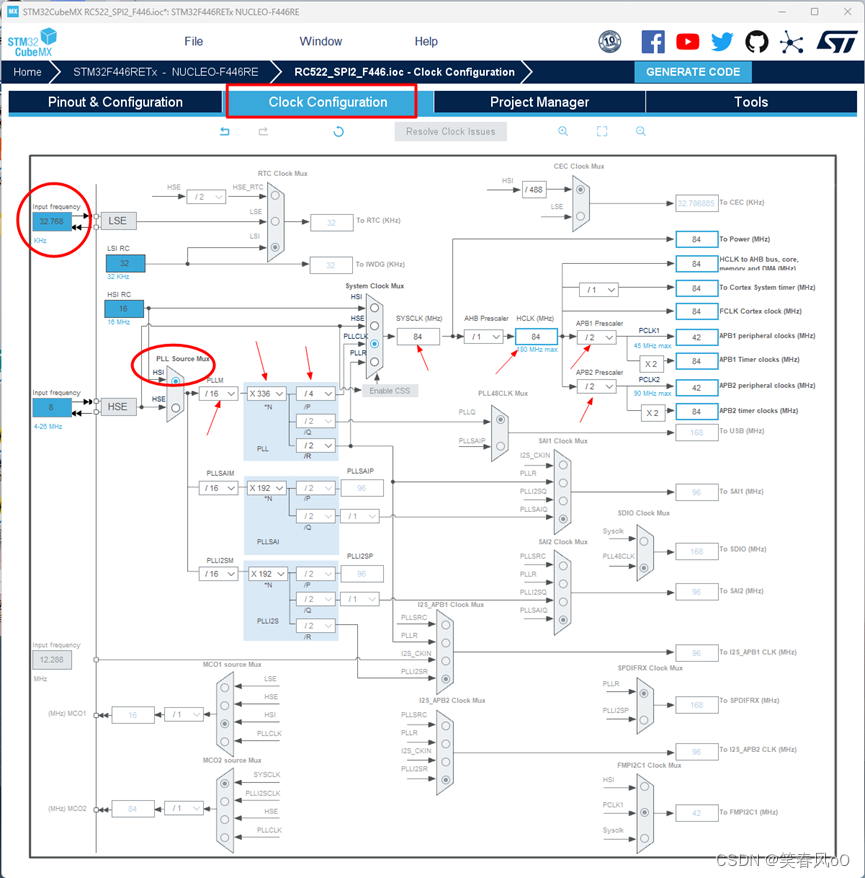
(2)使用外部时钟时,开发板需焊接的X3(8MHz)、C33、C34(20PF)、R36、R37),选择Clock Configuration,做如下配置:
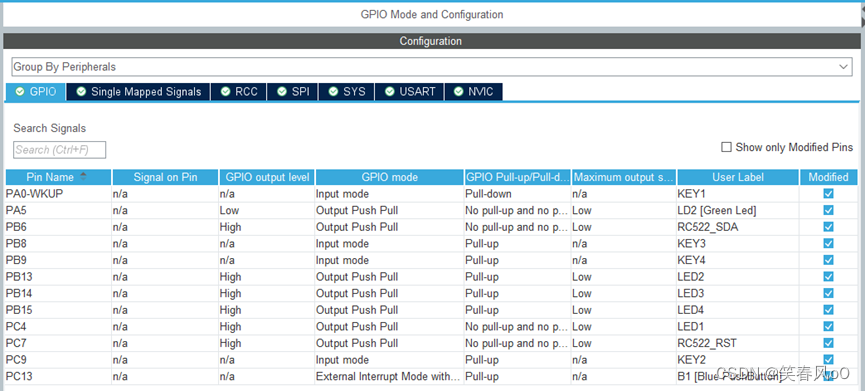
3.5 配置GPIO
结合开发版的硬件电路,进行GPIO设置。RC522板有六个接口:SCK、MOSI、MISO、SDA、RST,前三项为SPI接口,后两项SDA(片选)、RST(复位)。SPI口可采用ARM芯片自带的硬件资源控制,也可以用软件模拟;
在左侧选择System Core/GPIO,依次将RST、SDA与LED连接的IO设置为GPIO_Output,将按键设置为GPIO_Input,按键对应的IO口设置为输入。电路图参考图6。
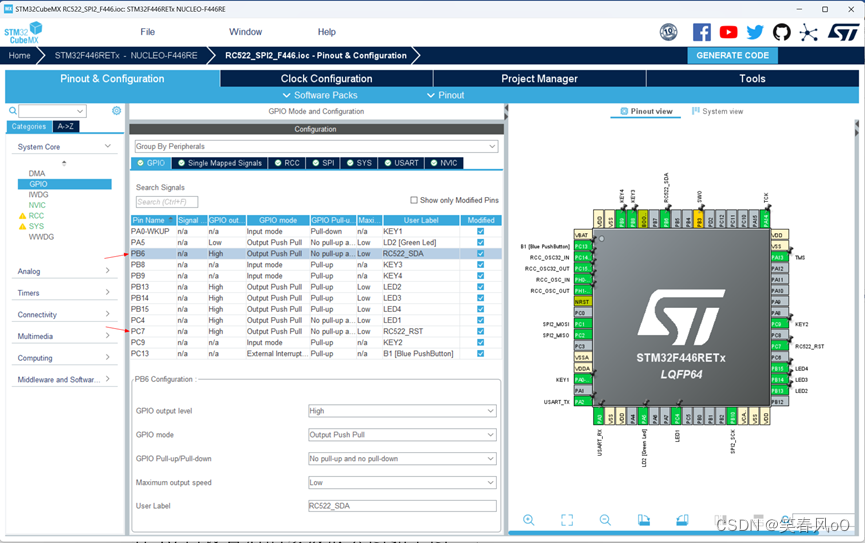
各IO口设置后的参数放大图如下:
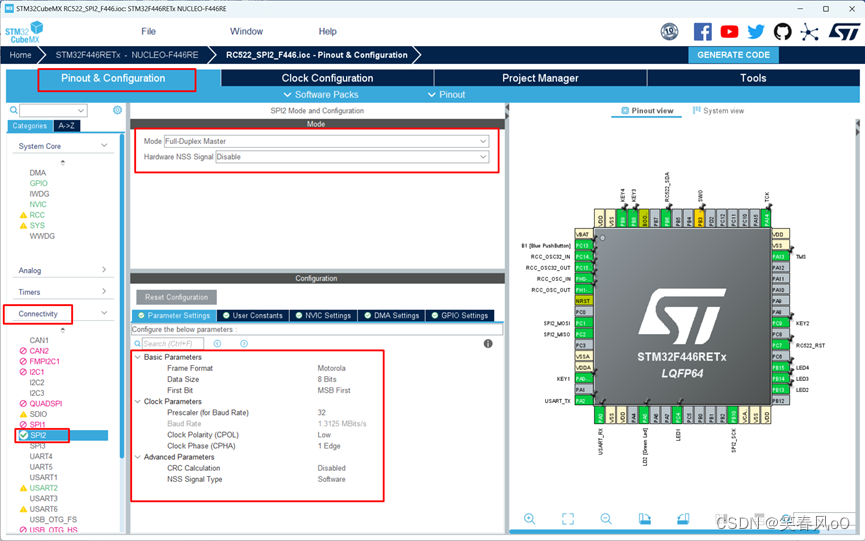
3.6 配置SPI
核心板STM32采用内部时钟时,硬件SPI2的配置如下:
3.7 配置串口
实验调试中的系统运行信息,可以通过串口输出。根据开发板的硬件电路,选中串口2。
USART2参数配置:
在 Connectivity 中选择 USART2 设置,并选择 Asynchronous 异步通信。
波特率为 115200 Bits/s。传输数据长度为8Bit。奇偶检验 None,停止位 1 ,接收和发送都使能。
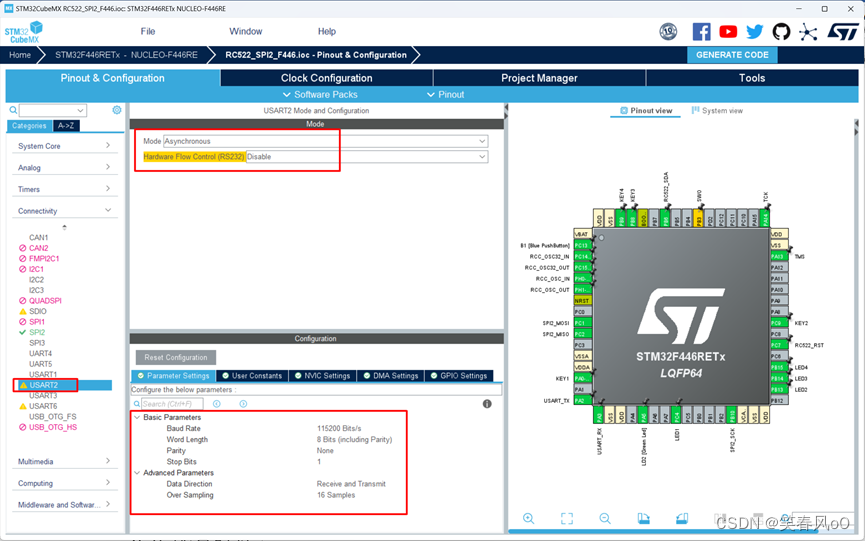
本文的串口采用阻塞方式收发信息,无需设置中断。
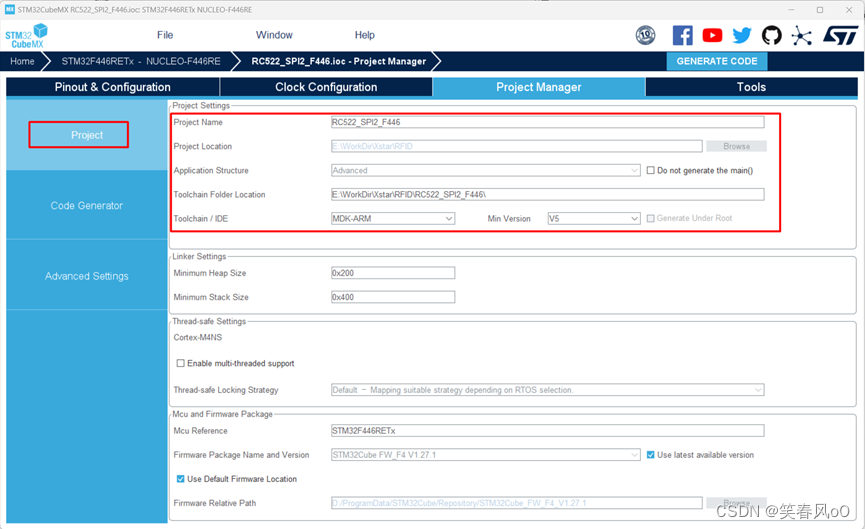
3.8 项目配置
在Project Manager下的Project中设置工程名称和工程路径,并选择编译软件。取消勾选Use lastest available version,选择其他版本:
代码生成设置:
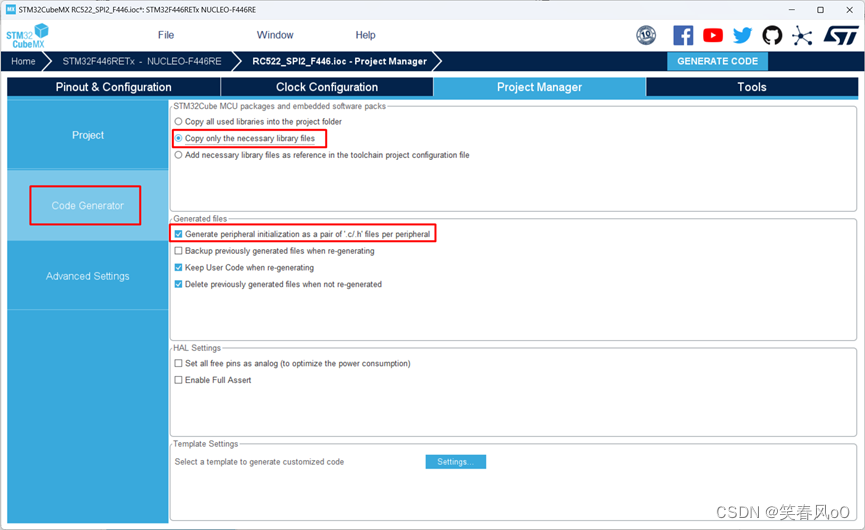
在Code Generate中选择第二个,然后Generate Code,即生成代码:
可以打开MDK工程编辑了。
4. MDK工程驱动代码调试
4.1 按键、LED程序
在工程文件夹内部新建“BSP”文件夹:
在BSP文件夹内建立自定义驱动的新文件夹:
本部分的代码从项目基础篇005. 按键控制中修改而来,程序与硬件必须匹配,为培养同学们在不同STM32芯片间移植程序的灵活性,本专栏中的课程采用几种不同的STM32芯片,请结合硬件电路修改代码。
Global文件夹内建立文件(红框内的文件用于一些全局变量函数,本文暂时不用)user.c和user.h:
User.h文件的代码如下:
#ifndef __USER_H
#define __USER_H
#ifdef __cplusplus
extern "C" {
#endif
#include "main.h"
//#define uchar unsigned char
typedef unsigned char uchar;
// ! --定义位带操作-->>>
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).M4同M3类似,只是寄存器地址变了.
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOJ_ODR_ADDr (GPIOJ_BASE+20) //0x40022414
#define GPIOK_ODR_ADDr (GPIOK_BASE+20) //0x40022814
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define GPIOJ_IDR_Addr (GPIOJ_BASE+16) //0x40022410
#define GPIOK_IDR_Addr (GPIOK_BASE+16) //0x40022810
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#define PJout(n) BIT_ADDR(GPIOJ_ODR_Addr,n) //输出
#define PJin(n) BIT_ADDR(GPIOJ_IDR_Addr,n) //输入
#define PKout(n) BIT_ADDR(GPIOK_ODR_Addr,n) //输出
#define PKin(n) BIT_ADDR(GPIOK_IDR_Addr,n) //输入
// ! --汇编函数声明-->>>
void WFI_SET(void); //执行WFI指令
void INTX_DISABLE(void);//关闭所有中断
void INTX_ENABLE(void); //开启所有中断
void MSR_MSP(uint32_t addr); //设置堆栈地址
// ! --延时函数声明-->>>
void delay_init(uint8_t SYSCLK);
void delay_ms(uint16_t nms);
void delay_us(uint32_t nus);
void delaySoft_ns(uint32_t t_ns); //ns级纯软件延时函数,不使用定时器,延时不准,需要调试
void delaySoft_us(uint32_t t_us);
#ifdef __cplusplus
}
#endif
#endif /*__ USER_H__ */
User.c文件的代码如下:
#include "global/user.h"
#ifdef USE_FULL_ASSERT
//当编译提示出错的时候此函数用来报告错误的文件和所在行
//file:指向源文件
//line:指向在文件中的行数
void assert_failed(uint8_t* file, uint32_t line)
{
while (1)
{
}
}
#endif
// ! ------延时函数------->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
//使用SysTick的普通计数模式对延迟进行管理(支持ucosii/ucosiii)
//包括delay_us,delay_ms
//********************************************************************************
static uint32_t fac_us=0; //us延时倍乘数
/**
* @DESCRIPTION: 初始化延迟函数
* @INPUT ARGS: 系统时钟频率SYSCLK=主PLL时钟,即:SYSCLK= (外部晶振*PLLN)/(PLLM*PLLP)
* @OUTPUT ARGS: none
* @NOTE : SYSTICK的时钟固定为AHB时钟
* @param {uint8_t} SYSCLK
* @return {*}
*/
void delay_init(uint8_t SYSCLK)
{
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); //SysTick频率为HCLK
fac_us=SYSCLK; //不论是否使用OS,fac_us都需要使用
}
//延时nus
//nus为要延时的us数.
//nus:0~190887435(最大值即2^32/fac_us@fac_us=22.5)
void delay_us(uint32_t nus)
{
uint32_t ticks;
uint32_t told,tnow,tcnt=0;
uint32_t reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
}
//延时nms
//nms:要延时的ms数
void delay_ms(uint16_t nms)
{
uint32_t i;
for(i=0;i<nms;i++) delay_us(1000);
}
// ! ------软件延时函数------->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
/**
* @DESCRIPTION: us级纯软件延时函数,不使用定时器
* @INPUT ARGS : none
* @OUTPUT ARGS: none
* @RETURNS : none
* @NOTES : F407内部时钟为168MHz时,每个指令周期约6ns。
* @param {uint32_t} t_us
*/
#define INS_CPU_CYCLES 8 //一条自增减指令所需的CPU周期数
#define ADJ_CPU_CYCLES 62 //延时函数自身需要的CPU周期数(根据需要调整)
void delaySoft_us(uint32_t t_us)
{
uint32_t count;
count = (HAL_RCC_GetHCLKFreq()/1000000*t_us - ADJ_CPU_CYCLES)/INS_CPU_CYCLES;
while(count--);
}
/**
* @DESCRIPTION: ns级纯软件延时函数,不使用定时器,延时不准,需要调试
* @INPUT ARGS : none
* @OUTPUT ARGS: none
* @RETURNS : none
* @NOTES : F407内部时钟为168MHz时,每个指令周期约6ns。
* @param {uint32_t} t_ns
*/
void delaySoft_ns(uint32_t t_ns)
{
do
{
;
}
while(t_ns--);
}
// ! ------汇编指令------->>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
#if defined (__ARMCC_VERSION) && (__ARMCC_VERSION >= 6010050) //AC6编译器
//以下为汇编函数(AC6)
void WFI_SET(void) //执行WFI指令
{
__ASM volatile("WFI");
}
void INTX_DISABLE(void) //关闭所有中断
{
__ASM volatile("CPSID I");
__ASM volatile("BX LR");
}
void INTX_ENABLE(void) //开启所有中断
{
__ASM volatile("CPSIE I");
__ASM volatile("BX LR");
}
void MSR_MSP(uint32_t addr) //设置堆栈地址
{
__ASM volatile("MSR MSP, r0");
__ASM volatile("BX r14");
}
#elif defined ( __CC_ARM ) //AC5编译器
__asm void WFI_SET(void)
{
WFI;
}
//关闭所有中断(但是不包括fault和NMI中断)
__asm void INTX_DISABLE(void)
{
CPSID I
BX LR
}
//开启所有中断
__asm void INTX_ENABLE(void)
{
CPSIE I
BX LR
}
//设置栈顶地址
//addr:栈顶地址
__asm void MSR_MSP(uint32_t addr)
{
MSR MSP, r0 //set Main Stack value
BX r14
}
#endif
Key文件夹内为键盘程序key.c和key.h
key.h文件的代码如下:
#ifndef _KEY_H
#define _KEY_H
#include "main.h"
#define KEY_ON 0
#define KEY_OFF 1
void key_Init(void);
uint8_t Key_Scan(GPIO_TypeDef * GPIOx,uint16_t GPIO_Pin);
#endif
key.c文件的代码如下:
#include "main.h"
#include <stdio.h>
#include <string.h>
#include "global/user.h"
#include "keykey.h"
/**
* @DESCRIPTION: 初始化SPI端口
* @INPUT ARGS : none
* @OUTPUT ARGS: none
* @RETURNS : none
* @NOTES : none
*/
void key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pins : PCPin PCPin */
GPIO_InitStruct.Pin = KEY2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = KEY1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(KEY1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : PBPin PBPin */
GPIO_InitStruct.Pin = KEY3_Pin|KEY4_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/**
* @brief 检测是否有按键按下
* @param GPIOx:具体的端口, x可以是(A...K)
* @param GPIO_PIN:具体的端口位, 可以是GPIO_PIN_x(x可以是0...15)
* @retval 按键的状态
* @arg KEY_ON:按键按下(注意,key_up按键的电平定义时相反的)
* @arg KEY_OFF:按键没按下
*/
uint8_t Key_Scan(GPIO_TypeDef * GPIOx,uint16_t GPIO_Pin)
{
/*检测是否有按键按下 */
if(HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == KEY_ON )
{
/*等待按键释放 */
while(HAL_GPIO_ReadPin(GPIOx,GPIO_Pin) == KEY_ON);
return KEY_ON;
}
else
return KEY_OFF;
}
4.2 RC522驱动程序
在工程的“BSP”文件夹内,分别建立如下文件:
其中,RC522.c及RC522.h为MFRC522芯片的通用驱动程序,这部分程序可以移植到任何单片机上。RFID.h和RFID.c是针对Mifare 1卡的应用代码。
RC522.h文件的代码如下:
#ifndef _RC522_H
#define _RC522_H
#include "main.h"
/***********************************************************************************
* MFRC522驱动程序 *
************************************************************************************/
/*MFRC522寄存器定义*/
//PAGE0
#define MFRC_RFU00 0x00
#define MFRC_CommandReg 0x01
#define MFRC_ComIEnReg 0x02
#define MFRC_DivlEnReg 0x03
#define MFRC_ComIrqReg 0x04
#define MFRC_DivIrqReg 0x05
#define MFRC_ErrorReg 0x06
#define MFRC_Status1Reg 0x07
#define MFRC_Status2Reg 0x08
#define MFRC_FIFODataReg 0x09
#define MFRC_FIFOLevelReg 0x0A
#define MFRC_WaterLevelReg 0x0B
#define MFRC_ControlReg 0x0C
#define MFRC_BitFramingReg 0x0D
#define MFRC_CollReg 0x0E
#define MFRC_RFU0F 0x0F
//PAGE1
#define MFRC_RFU10 0x10
#define MFRC_ModeReg 0x11
#define MFRC_TxModeReg 0x12
#define MFRC_RxModeReg 0x13
#define MFRC_TxControlReg 0x14
#define MFRC_TxAutoReg 0x15 //中文手册有误
#define MFRC_TxSelReg 0x16
#define MFRC_RxSelReg 0x17
#define MFRC_RxThresholdReg 0x18
#define MFRC_DemodReg 0x19
#define MFRC_RFU1A 0x1A
#define MFRC_RFU1B 0x1B
#define MFRC_MifareReg 0x1C
#define MFRC_RFU1D 0x1D
#define MFRC_RFU1E 0x1E
#define MFRC_SerialSpeedReg 0x1F
//PAGE2
#define MFRC_RFU20 0x20
#define MFRC_CRCResultRegM 0x21
#define MFRC_CRCResultRegL 0x22
#define MFRC_RFU23 0x23
#define MFRC_ModWidthReg 0x24
#define MFRC_RFU25 0x25
#define MFRC_RFCfgReg 0x26
#define MFRC_GsNReg 0x27
#define MFRC_CWGsCfgReg 0x28
#define MFRC_ModGsCfgReg 0x29
#define MFRC_TModeReg 0x2A
#define MFRC_TPrescalerReg 0x2B
#define MFRC_TReloadRegH 0x2C
#define MFRC_TReloadRegL 0x2D
#define MFRC_TCounterValueRegH 0x2E
#define MFRC_TCounterValueRegL 0x2F
//PAGE3
#define MFRC_RFU30 0x30
#define MFRC_TestSel1Reg 0x31
#define MFRC_TestSel2Reg 0x32
#define MFRC_TestPinEnReg 0x33
#define MFRC_TestPinValueReg 0x34
#define MFRC_TestBusReg 0x35
#define MFRC_AutoTestReg 0x36
#define MFRC_VersionReg 0x37
#define MFRC_AnalogTestReg 0x38
#define MFRC_TestDAC1Reg 0x39
#define MFRC_TestDAC2Reg 0x3A
#define MFRC_TestADCReg 0x3B
#define MFRC_RFU3C 0x3C
#define MFRC_RFU3D 0x3D
#define MFRC_RFU3E 0x3E
#define MFRC_RFU3F 0x3F
/*MFRC522的FIFO长度定义*/
#define MFRC_FIFO_LENGTH 64
/*MFRC522传输的帧长定义*/
#define MFRC_MAXRLEN 18
/*MFRC522命令集,中文手册P59*/
#define MFRC_IDLE 0x00 //取消当前命令的执行
#define MFRC_CALCCRC 0x03 //激活CRC计算
#define MFRC_TRANSMIT 0x04 //发送FIFO缓冲区内容
#define MFRC_NOCMDCHANGE 0x07 //无命令改变
#define MFRC_RECEIVE 0x08 //激活接收器接收数据
#define MFRC_TRANSCEIVE 0x0C //发送并接收数据
#define MFRC_AUTHENT 0x0E //执行Mifare认证(验证密钥)
#define MFRC_RESETPHASE 0x0F //复位MFRC522
/*MFRC522通讯时返回的错误代码*/
#define MFRC_OK (char)0
#define MFRC_NOTAGERR (char)(-1)
#define MFRC_ERR (char)(-2)
/*MFRC522函数声明*/
void MFRC_Init(void);
void MFRC_WriteReg(uint8_t addr, uint8_t data);
uint8_t MFRC_ReadReg(uint8_t addr);
void MFRC_SetBitMask(uint8_t addr, uint8_t mask);
void MFRC_ClrBitMask(uint8_t addr, uint8_t mask);
void MFRC_CalulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData);
char MFRC_CmdFrame(uint8_t cmd, uint8_t *pInData, uint8_t InLenByte, uint8_t *pOutData, uint16_t *pOutLenBit);
/***********************************************************************************
* MFRC552与MF1卡通讯接口程序 *
************************************************************************************/
/*Mifare1卡片命令字*/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态的卡
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //减值(扣除)
#define PICC_INCREMENT 0xC1 //增值(充值)
#define PICC_TRANSFER 0xB0 //转存(传送)
#define PICC_RESTORE 0xC2 //恢复(重储)
#define PICC_HALT 0x50 //休眠
/*PCD通讯时返回的错误代码*/
#define PCD_OK (char)0 //成功
#define PCD_NOTAGERR (char)(-1) //无卡
#define PCD_ERR (char)(-2) //出错
/*PCD函数声明*/
void PCD_Init(void);
void PCD_Reset(void);
void PCD_AntennaOn(void);
void PCD_AntennaOff(void);
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType); //寻卡,并返回卡的类型
char PCD_Anticoll(uint8_t *pSnr); //防冲突,返回卡号
char PCD_Select(uint8_t *pSnr); //选卡
char PCD_AuthState(uint8_t AuthMode, uint8_t BlockAddr, uint8_t *pKey, uint8_t *pSnr); //验证密码(密码A和密码B)
char PCD_WriteBlock(uint8_t BlockAddr, uint8_t *pData); //写数据
char PCD_ReadBlock(uint8_t BlockAddr, uint8_t *pData); //读数据
char PCD_Value(uint8_t mode, uint8_t BlockAddr, uint8_t *pValue);
char PCD_BakValue(uint8_t sourceBlockAddr, uint8_t goalBlockAddr);
char PCD_Halt(void);
void StartIDcardTask(void const * argument);
#endif
RC522.c文件的代码如下:
/**
MFRC522-AN模块采用Philips MFRC522芯片设计读卡电路,使用方便,成本低廉,适用
于设备开发、读卡器开发等高级应用的用户、需要进行射频卡终端设计/生产的用户。
模块参数:
①工作电压:3.3v
②工作频率:13.56MHz
③支持卡类型:mifare1 s50、mifare1s70、 mifareUltraLight、mifare Pro, mifare Desfire
④通信方式:SPI协议
⑤环境工作温度:-20°C——80°C
M1卡分为16个扇区,每个扇区由四个块(块0、块1、块2、块3)组成
将16个扇区的64个块按绝对地址编号为:0~63
第0个扇区的块0(即绝对地址0块),用于存放厂商代码,已经固化不可更改
每个扇区的块0、块1、块2为数据块,可用于存放数据
每个扇区的块3为控制块(绝对地址为:块3、块7、块11.....)包括密码A,存取控制、密码B等
1、CPU选择
STM32F446RE,内部时钟180MHz
2、STM32CubeMX 定义任意两个引脚,作为复位脚和片选脚,并对引脚作出如下配置:
GPlO output level --High
GPIO mode --Output Push Pull
GPIO Pull-up/Pull-down --No pull-up and no pull-down
Maximum output speed --LOW
User label --RC522_RST/RC522_SDA
---------------------------------------------------------
开启SPI功能,模式选择-->Full-Duplex Master(全双工),其他配置如下:
Basic Parameters
Frame format-->Motorola
Data size -->8 Bits
First bit -->MSB First
Clock Parameters
Prescaler(for Baud Rate)-->8
Baud rate -->5.625MBits/s【RC522中的SPI最高速率为10MHz/s】
Clock Polarity(CPOL) -->LOW
Clock Phase(CPHA) -->1 Edge
Advanced Parameters
CRC Calculation -->Disabled
NSS Signal Type -->Software
3、接线方式:
SPI_MISO(MUC)--> MISO(器件)
SPI_MOSI(MUC)--> MOSI(器件)
其他引脚一一对应
//! Nucleo-F446RE接口
//SPI2_SCK PB10---(接Arduino D6)
//SPI2_MISO PC2----(接CN7左下2)
//SPI2_MOSI PC1----(接Arduino A4)
//RCC522_RST(CE) PC7----(接Arduino D9)
//RCC522_NSS(SDA) PB6----(接Arduino D10)
//RCC522_IRQ 悬空
4、SPI模式说明:SPI总线传输的四种模式:
* SPI传输的模式由CPOL:clock polarity 时钟的极性,和CPHA:clock phase 时钟的相位控制。
* RC522采用的是CPOL=0,CPHA=0的工作模式。在CubeMX中,SPI_CPHA设置为1Edge。
* ┌─────────┬───────┬───────┬─────────────────┬─────────────────┐
* │ SPI模式 │ CPOL │ CPHA │ 空闲时间SCLK状态 │ 采样时刻 │
* │ 0 │ 0 │ 0 │ 低电平 │ 奇数边沿(上升沿) │
* │ 1 │ 0 │ 1 │ 低电平 │ 偶数边沿(下降沿) │
* │ 2 │ 1 │ 0 │ 高电平 │ 奇数边沿(下降沿) │
* │ 3 │ 1 │ 1 │ 高电平 │ 偶数边沿(上升沿) │
* └─────────┴───────┴───────┴─────────────────┴─────────────────┘
5、应用函数
MFRC_Init();//初始化
PCD_Reset();//器件复位
PCD_Request(PICC_REQALL, RxBuffer);//返回值为0,代表寻卡成功;并把卡类型存入RxBuffer中
PCD_Anticoll(RxBuffer); //把(十六进制)的4个字节卡号存储在数组RxBuffer中
***********************************/
// #define RC522_SDA GPIO_Port GPIOB
// #define RC522_SDA Pin GPIO_PIN_6 //cs、nss、SDA指同一个口
// #define RC522_RST GPIO_Port GPIOC
// #define RC522_RST Pin GPIO_PIN_7
#include "main.h"
#include <stdio.h>
#include <string.h>
#include "global/user.h"
#include "usart.h"
#include "RC522RC522.h"
extern SPI_HandleTypeDef hspi2;
// #define osDelay HAL_Delay
#define osDelay delay_ms
#define RS522_RST(N) HAL_GPIO_WritePin(RC522_RST_GPIO_Port, RC522_RST_Pin, N == 1 ? GPIO_PIN_SET : GPIO_PIN_RESET)
#define RC522_SDA(N) HAL_GPIO_WritePin(RC522_SDA_GPIO_Port, RC522_SDA_Pin, N == 1 ? GPIO_PIN_SET : GPIO_PIN_RESET)
/**************************************************************************************
* 函数名称:MFRC_Init
* 功能描述:MFRC初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:MFRC的SPI接口速率为0~10Mbps
***************************************************************************************/
void MFRC_Init(void)
{
RC522_SDA(1);
RS522_RST(1);
}
/**************************************************************************************
* 函数名称: SPI_RW_Byte
* 功能描述: 模拟SPI读写一个字节
* 入口参数: -byte:要发送的数据
* 出口参数: -byte:接收到的数据
***************************************************************************************/
static uint8_t ret; // 这些函数是HAL与标准库不同的地方【读写函数】
uint8_t SPI2_RW_Byte(uint8_t byte)
{
//硬件SPI
HAL_SPI_TransmitReceive(&hspi2, &byte, &ret, 1, 10); // 把byte 写入,并读出一个值,把它存入ret
return ret; // 入口是byte 的地址,读取时用的也是ret地址,一次只写入一个值10
//下面是模拟SPI
// if (byte == 0x00) // 读数据时
// {
// ret = RC522_SPI_ReadByte();
// }
// RC522_SPI_SendByte(byte);
// return ret;
}
/**************************************************************************************
* 函数名称:MFRC_WriteReg
* 功能描述:写一个寄存器
* 入口参数:-addr:待写的寄存器地址
* -data:待写的寄存器数据
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_WriteReg(uint8_t addr, uint8_t data)
{
uint8_t AddrByte;
AddrByte = (addr << 1) & 0x7E; // 求出地址字节
RC522_SDA(0); // NSS拉低
SPI2_RW_Byte(AddrByte); // 写地址字节
SPI2_RW_Byte(data); // 写数据
RC522_SDA(1); // NSS拉高
}
/**************************************************************************************
* 函数名称:MFRC_ReadReg
* 功能描述:读一个寄存器
* 入口参数:-addr:待读的寄存器地址
* 出口参数:无
* 返 回 值:-data:读到寄存器的数据
* 说 明:无
***************************************************************************************/
uint8_t MFRC_ReadReg(uint8_t addr)
{
uint8_t AddrByte, data;
AddrByte = ((addr << 1) & 0x7E) | 0x80; // 求出地址字节
RC522_SDA(0); // NSS拉低
SPI2_RW_Byte(AddrByte); // 写地址字节
data = SPI2_RW_Byte(0x00); // 读数据
RC522_SDA(1); // NSS拉高
return data;
}
/**************************************************************************************
* 函数名称:MFRC_SetBitMask
* 功能描述:设置寄存器的位
* 入口参数:-addr:待设置的寄存器地址
* -mask:待设置寄存器的位(可同时设置多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_SetBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); // 先读回寄存器的值
MFRC_WriteReg(addr, temp | mask); // 处理过的数据再写入寄存器
}
/**************************************************************************************
* 函数名称:MFRC_ClrBitMask
* 功能描述:清除寄存器的位
* 入口参数:-addr:待清除的寄存器地址
* -mask:待清除寄存器的位(可同时清除多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_ClrBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); // 先读回寄存器的值
MFRC_WriteReg(addr, temp & ~mask); // 处理过的数据再写入寄存器
}
/**************************************************************************************
* 函数名称:MFRC_CalulateCRC
* 功能描述:用MFRC计算CRC结果
* 入口参数:-pInData:带进行CRC计算的数据
* -len:带进行CRC计算的数据长度
* -pOutData:CRC计算结果
* 出口参数:-pOutData:CRC计算结果
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_CalulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData)
{
// 0xc1 1 2 pInData[2]
uint8_t temp;
uint32_t i;
MFRC_ClrBitMask(MFRC_DivIrqReg, 0x04); // 使能CRC中断
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); // 取消当前命令的执行
MFRC_SetBitMask(MFRC_FIFOLevelReg, 0x80); // 清除FIFO及其标志位
for (i = 0; i < len; i++) // 将待CRC计算的数据写入FIFO
{
MFRC_WriteReg(MFRC_FIFODataReg, *(pInData + i));
}
MFRC_WriteReg(MFRC_CommandReg, MFRC_CALCCRC); // 执行CRC计算
i = 100000;
do
{
temp = MFRC_ReadReg(MFRC_DivIrqReg); // 读取DivIrqReg寄存器的值
i--;
} while ((i != 0) && !(temp & 0x04)); // 等待CRC计算完成
pOutData[0] = MFRC_ReadReg(MFRC_CRCResultRegL); // 读取CRC计算结果
pOutData[1] = MFRC_ReadReg(MFRC_CRCResultRegM);
}
/**************************************************************************************
* 函数名称:MFRC_CmdFrame
* 功能描述:MFRC522和ISO14443A卡通讯的命令帧函数
* 入口参数:-cmd:MFRC522命令字
* -pIndata:MFRC522发送给MF1卡的数据的缓冲区首地址
* -InLenByte:发送数据的字节长度
* -pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:MF1卡返回数据的位长度
* 出口参数:-pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:用于MF1卡返回数据位长度的首地址
* 返 回 值:-status:错误代码(MFRC_OK、MFRC_NOTAGERR、MFRC_ERR)
* 说 明:无
***************************************************************************************/
char MFRC_CmdFrame(uint8_t cmd, uint8_t *pInData, uint8_t InLenByte, uint8_t *pOutData, uint16_t *pOutLenBit)
{
uint8_t lastBits;
uint8_t n;
uint32_t i;
char status = MFRC_ERR;
uint8_t irqEn = 0x00;
uint8_t waitFor = 0x00;
/*根据命令设置标志位*/
switch (cmd)
{
case MFRC_AUTHENT: // Mifare认证
irqEn = 0x12;
waitFor = 0x10; // idleIRq中断标志
break;
case MFRC_TRANSCEIVE: // 发送并接收数据
irqEn = 0x77;
waitFor = 0x30; // RxIRq和idleIRq中断标志
break;
}
/*发送命令帧前准备*/
MFRC_WriteReg(MFRC_ComIEnReg, irqEn | 0x80); // 开中断
MFRC_ClrBitMask(MFRC_ComIrqReg, 0x80); // 清除中断标志位SET1
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); // 取消当前命令的执行
MFRC_SetBitMask(MFRC_FIFOLevelReg, 0x80); // 清除FIFO缓冲区及其标志位
/*发送命令帧*/
for (i = 0; i < InLenByte; i++) // 写入命令参数
{
MFRC_WriteReg(MFRC_FIFODataReg, pInData[i]); // 写数据进 FIFODataReg
}
MFRC_WriteReg(MFRC_CommandReg, cmd); // 执行命令
if (cmd == MFRC_TRANSCEIVE)
{
MFRC_SetBitMask(MFRC_BitFramingReg, 0x80); // 启动发送
}
i = 300000; // 根据时钟频率调整,操作M1卡最大等待时间25ms
do // 认证 与寻卡等待时间
{
n = MFRC_ReadReg(MFRC_ComIrqReg); // 查询事件中断
i--;
} while ((i != 0) && !(n & 0x01) && !(n & waitFor)); // 等待命令完成
MFRC_ClrBitMask(MFRC_BitFramingReg, 0x80); // 停止发送
/*处理接收的数据*/
if (i != 0)
{
// 读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
if (!(MFRC_ReadReg(MFRC_ErrorReg) & 0x1B))
{
status = MFRC_OK;
if (n & irqEn & 0x01) // 是否发生定时器中断
{
status = MFRC_NOTAGERR;
}
if (cmd == MFRC_TRANSCEIVE)
{
// 读FIFO中保存的字节数
n = MFRC_ReadReg(MFRC_FIFOLevelReg);
lastBits = MFRC_ReadReg(MFRC_ControlReg) & 0x07; // 最后接收到得字节的有效位数
if (lastBits)
{
*pOutLenBit = (n - 1) * 8 + lastBits; // N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
}
else
{
*pOutLenBit = n * 8; // 最后接收到的字节整个字节有效
}
if (n == 0)
{
n = 1;
}
if (n > MFRC_MAXRLEN)
{
n = MFRC_MAXRLEN;
}
for (i = 0; i < n; i++)
{
pOutData[i] = MFRC_ReadReg(MFRC_FIFODataReg);
}
}
}
else
{
status = MFRC_ERR;
}
}
MFRC_SetBitMask(MFRC_ControlReg, 0x80); // 停止定时器运行
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); // 取消当前命令的执行
return status;
}
/**************************************************************************************
* 函数名称:PCD_Reset
* 功能描述:PCD复位
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void PCD_Reset(void)
{
/*硬复位*/
RS522_RST(1); // 用到复位引脚
osDelay(2);
RS522_RST(0);
osDelay(2);
RS522_RST(1);
osDelay(2);
/*软复位*/
MFRC_WriteReg(MFRC_CommandReg, MFRC_RESETPHASE);
osDelay(2);
/*复位后的初始化配置*/
MFRC_WriteReg(MFRC_ModeReg, 0x3D); // CRC初始值0x6363
MFRC_WriteReg(MFRC_TReloadRegL, 30); // 定时器重装值
MFRC_WriteReg(MFRC_TReloadRegH, 0);
MFRC_WriteReg(MFRC_TModeReg, 0x8D); // 定义内部定时器的设置
MFRC_WriteReg(MFRC_TPrescalerReg, 0x3E); // 设置定时器预分频值
MFRC_WriteReg(MFRC_TxAutoReg, 0x40); // 调制发送信号为100%ASK
PCD_AntennaOff(); // 关天线
osDelay(2);
PCD_AntennaOn(); // 开天线
}
/**************************************************************************************
* 函数名称:PCD_AntennaOn
* 功能描述:开启天线,使能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOn(void)
{
uint8_t temp;
temp = MFRC_ReadReg(MFRC_TxControlReg);
if (!(temp & 0x03))
{
MFRC_SetBitMask(MFRC_TxControlReg, 0x03);
}
}
/**************************************************************************************
* 函数名称:PCD_AntennaOff
* 功能描述:关闭天线,失能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOff(void)
{
MFRC_ClrBitMask(MFRC_TxControlReg, 0x03);
}
/***************************************************************************************
* 函数名称:PCD_Init
* 功能描述:读写器初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void PCD_Init(void)
{
MFRC_Init(); // MFRC管脚配置
PCD_Reset(); // PCD复位 并初始化配置
PCD_AntennaOff(); // 关闭天线
PCD_AntennaOn(); // 开启天线
}
/***************************************************************************************
* 函数名称:PCD_Request
* 功能描述:寻卡
* 入口参数: -RequestMode:寻卡方式
* PICC_REQIDL:寻天线区内未进入休眠状态
* PICC_REQALL:寻天线区内全部卡
* -pCardType: 用于保存卡片类型
* 出口参数:-pCardType:卡片类型
* 0x4400:Mifare_UltraLight
* 0x0400:Mifare_One(S50)
* 0x0200:Mifare_One(S70)
* 0x0800:Mifare_Pro(X)
* 0x4403:Mifare_DESFire
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType)
{
int status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08); // 关内部温度传感器
MFRC_WriteReg(MFRC_BitFramingReg, 0x07); // 存储模式,发送模式,是否启动发送等
MFRC_SetBitMask(MFRC_TxControlReg, 0x03); // 配置调制信号13.56MHZ
CmdFrameBuf[0] = RequestMode; // 存入 卡片命令字
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 1, CmdFrameBuf, &unLen);
if ((status == PCD_OK) && (unLen == 0x10)) // 寻卡成功返回卡类型
{
*pCardType = CmdFrameBuf[0];
*(pCardType + 1) = CmdFrameBuf[1];
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Anticoll
* 功能描述:防冲撞,获取卡号
* 入口参数:-pSnr:用于保存卡片序列号,4字节
* 出口参数:-pSnr:卡片序列号,4字节
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Anticoll(uint8_t *pSnr)
{
char status;
uint8_t i, snr_check = 0;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08); // 清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
MFRC_WriteReg(MFRC_BitFramingReg, 0x00); // 清理寄存器 停止收发
MFRC_ClrBitMask(MFRC_CollReg, 0x80); // 清ValuesAfterColl所有接收的位在冲突后被清除
CmdFrameBuf[0] = PICC_ANTICOLL1; // 卡片防冲突命令
CmdFrameBuf[1] = 0x20;
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 2, CmdFrameBuf, &unLen); // 与卡片通信
if (status == PCD_OK) // 通信成功
{
for (i = 0; i < 4; i++)
{
*(pSnr + i) = CmdFrameBuf[i]; // 读出UID
snr_check ^= CmdFrameBuf[i];
}
if (snr_check != CmdFrameBuf[i])
{
status = PCD_ERR;
}
}
MFRC_SetBitMask(MFRC_CollReg, 0x80);
return status;
}
/***************************************************************************************
* 函数名称:PCD_Select
* 功能描述:选定卡片
* 入口参数:-pSnr:卡片序列号,4字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Select(uint8_t *pSnr)
{
char status;
uint8_t i;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_ANTICOLL1;
CmdFrameBuf[1] = 0x70;
CmdFrameBuf[6] = 0;
for (i = 0; i < 4; i++)
{
CmdFrameBuf[i + 2] = *(pSnr + i);
CmdFrameBuf[6] ^= *(pSnr + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 7, &CmdFrameBuf[7]);
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 9, CmdFrameBuf, &unLen);
if ((status == PCD_OK) && (unLen == 0x18))
{
status = PCD_OK;
}
else
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_AuthState
* 功能描述:验证卡片密码
* 入口参数:-AuthMode:验证模式
* PICC_AUTHENT1A:验证A密码
* PICC_AUTHENT1B:验证B密码
* -BlockAddr:块地址(0~63)
* -pKey:密码
* -pSnr:卡片序列号,4字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:验证密码时,以扇区为单位,BlockAddr参数可以是同一个扇区的任意块
***************************************************************************************/
char PCD_AuthState(uint8_t AuthMode, uint8_t BlockAddr, uint8_t *pKey, uint8_t *pSnr)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = AuthMode;
CmdFrameBuf[1] = BlockAddr;
for (i = 0; i < 6; i++)
{
CmdFrameBuf[i + 2] = *(pKey + i);
}
for (i = 0; i < 4; i++)
{
CmdFrameBuf[i + 8] = *(pSnr + i);
}
status = MFRC_CmdFrame(MFRC_AUTHENT, CmdFrameBuf, 12, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (!(MFRC_ReadReg(MFRC_Status2Reg) & 0x08)))
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_WriteBlock
* 功能描述:写MF1卡数据块
* 入口参数:-BlockAddr:块地址。M1卡总共有16个扇区(每个扇区有:3个数据块+1个控制块),共64个块
* -pData: 用于保存待写入的数据,16字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_WriteBlock(uint8_t BlockAddr, uint8_t *pData)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_WRITE;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if (status == PCD_OK)
{
for (i = 0; i < 16; i++)
{
CmdFrameBuf[i] = *(pData + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 16, &CmdFrameBuf[16]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 18, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_ReadBlock
* 功能描述:读MF1卡数据块
* 入口参数:-BlockAddr:块地址
* -pData: 用于保存读出的数据,16字节
* 出口参数:-pData: 用于保存读出的数据,16字节
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_ReadBlock(uint8_t BlockAddr, uint8_t *pData)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_READ;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status == PCD_OK) && (unLen == 0x90))
{
for (i = 0; i < 16; i++)
{
*(pData + i) = CmdFrameBuf[i];
}
}
else
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Value
* 功能描述:对MF1卡数据块增减值操作
* 入口参数:
* -BlockAddr:块地址
* -pValue:四字节增值的值,低位在前
* -mode:数值块操作模式
* PICC_INCREMENT:增值
* PICC_DECREMENT:减值
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Value(uint8_t mode, uint8_t BlockAddr, uint8_t *pValue)
{
// 0XC1 1 Increment[4]={0x03, 0x01, 0x01, 0x01};
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = mode;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if (status == PCD_OK)
{
for (i = 0; i < 16; i++)
{
CmdFrameBuf[i] = *(pValue + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 4, &CmdFrameBuf[4]);
unLen = 0;
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 6, CmdFrameBuf, &unLen);
if (status != PCD_ERR)
{
status = PCD_OK;
}
}
if (status == PCD_OK)
{
CmdFrameBuf[0] = PICC_TRANSFER;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_BakValue
* 功能描述:备份钱包(块转存)
* 入口参数:-sourceBlockAddr:源块地址
* -goalBlockAddr :目标块地址
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:只能在同一个扇区内转存
***************************************************************************************/
char PCD_BakValue(uint8_t sourceBlockAddr, uint8_t goalBlockAddr)
{
char status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_RESTORE;
CmdFrameBuf[1] = sourceBlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if (status == PCD_OK)
{
CmdFrameBuf[0] = 0;
CmdFrameBuf[1] = 0;
CmdFrameBuf[2] = 0;
CmdFrameBuf[3] = 0;
MFRC_CalulateCRC(CmdFrameBuf, 4, &CmdFrameBuf[4]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 6, CmdFrameBuf, &unLen);
if (status != PCD_ERR)
{
status = PCD_OK;
}
}
if (status != PCD_OK)
{
return PCD_ERR;
}
CmdFrameBuf[0] = PICC_TRANSFER;
CmdFrameBuf[1] = goalBlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if ((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Halt
* 功能描述:命令卡片进入休眠状态
* 入口参数:无
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Halt(void)
{
char status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_HALT;
CmdFrameBuf[1] = 0;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
return status;
}
RC522.c中的函数说明:
IO口定义:
#define RS522_RST(N) HAL_GPIO_WritePin(RC522_RST_GPIO_Port, RC522_RST_Pin, N == 1 ? GPIO_PIN_SET : GPIO_PIN_RESET)
#define RC522_SDA(N) HAL_GPIO_WritePin(RC522_SDA_GPIO_Port, RC522_SDA_Pin, N == 1 ? GPIO_PIN_SET : GPIO_PIN_RESET)
通过SPI总线读写RC522模块函数:uint8_t SPI2_RW_Byte(uint8_t byte)
RFID.h文件的代码如下:
#ifndef _RFID_H
#define _RFID_H
#include "main.h"
extern uint8_t readUid[5];
extern uint8_t UID[5]; //定义一张已知卡号,可以通过串口打印通过下面读取到的打印到上位机,再把那个读取的卡号填入数组
extern uint8_t DefaultKey[6]; // 默认秘钥
/*函数声明*/
void RC522_Init(void);
uint8_t EntranceGuard(uint8_t *readUid,void(*funCallBack)(void));
void DoorSensor(void);
void RfidIndicator(void);
//void notarize_type1(void);
char WriteAmount(uint8_t addr, uint32_t pData);
char ReadAmount(uint8_t addr, uint32_t *pData);
char ReadAmount(uint8_t addr, uint32_t *pData);
char WriteDataBlock(uint8_t addr, uint8_t *pData, uint8_t Len);
char ReadDataBlock(uint8_t addr, uint8_t *pData);
#endif
RFID.c文件的代码如下:
#include <stdio.h>
#include <string.h>
#include "global/user.h"
#include "RC522RC522.h"
#include "RC522RFID.h"
uint8_t readUid[5];
uint8_t UID[5] = {0x37, 0x7e, 0xbc, 0xfd}; // 自定义的卡号,用于比较
uint8_t DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // 默认秘钥
/***************************************************************************************
* 函数名称:RC522_Init
* 功能描述:初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void RC522_Init(void)
{
MFRC_Init();
PCD_Reset();
printf("RC522初始化完成
");
}
/***************************************************************************************
* 函数名称:门禁开门
* 功能描述:只读取并显示卡号,成功读取到卡号就退出,并调用回调功能函数
* 入口参数:-readUid:用于保存卡片序列号,4字节
-funCallBack:函数传参,无需会掉功能函数时填NULL即可
* 出口参数:
* 返 回 值:读到卡号返回0,失败返回1
* 说 明:无
***************************************************************************************/
uint8_t EntranceGuard(uint8_t *readUid, void (*funCallBack)(void))
{
uint8_t Temp[5]; // 存放IC卡的类型和UID(IC卡序列号)
if (PCD_Request(PICC_REQALL, Temp) == PCD_OK) // 寻卡
{//成功
if (Temp[0] == 0x04 && Temp[1] == 0x00)
printf("Mifare1-S50
");
else if (Temp[0] == 0x02 && Temp[1] == 0x00)
printf("Mifare1-S70");
else if (Temp[0] == 0x44 && Temp[1] == 0x00)
printf("Mifare-UltraLight(MF0)");
else if (Temp[0] == 0x08 && Temp[1] == 0x00)
printf("Mifare-Pro(MF2)");
else if (Temp[0] == 0x44 && Temp[1] == 0x03)
printf("Mifare Desire(MF3)");
else
printf("Unknown");
if (PCD_Anticoll(readUid) == PCD_OK) // 防冲撞,获取卡号,存入readUid
{ // 防冲撞成功
if (funCallBack != NULL)
funCallBack(); // 调用功能执行函数,如指示灯信号
return 0;
}
}
return 1;
}
/***************************************************************************************
* 函数名称:DoorSensor
* 功能描述:门磁控制信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void DoorSensor(void)
{
// 【STM32F446,NUCLEO-F446RE板】使用STM32CubeMX创建MDK工程,实现流水灯
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_RESET); // LED亮
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_SET); // LED灭
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_RESET); // LED灭
HAL_Delay(500); // 延时 500ms
HAL_GPIO_WritePin(LED1_GPIO_Port, LED1_Pin, GPIO_PIN_SET); // LED灭
HAL_GPIO_WritePin(LED2_GPIO_Port, LED2_Pin, GPIO_PIN_RESET); // LED亮
HAL_GPIO_WritePin(LED3_GPIO_Port, LED3_Pin, GPIO_PIN_SET); // LED灭
}
/***************************************************************************************
* 函数名称:RfidIndicator
* 功能描述:指示灯信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void RfidIndicator(void)
{
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_RESET); // LED1亮
HAL_Delay(1000); // 延时 500ms
HAL_GPIO_WritePin(LED4_GPIO_Port, LED4_Pin, GPIO_PIN_SET); // LED1灭
}
/**
* @brief 判断 addr 是否数据块
* @param addr,块绝对地址(0-63)
* @retval 返回值 1:是数据块;0:不是数据块
*/
char IsDataBlock(uint8_t addr)
{
if (addr == 0)
{
printf("第0扇区的块0不可更改,不应对其进行操作
");
return 0;
}
// 如果是数据块(不包含数据块0)
if ((addr < 64) && (((addr + 1) % 4) != 0))
{
return 1;
}
printf("块地址不是指向数据块
");
return 0;
}
/**
* @brief 写 pData 字符串到M1卡中的数据块
* @param addr,数据块地址(不能写入控制块)
* @param pData,写入的数据,16字节
* @retval 状态值= PCD_OK,成功
*/
char PCD_WriteString(uint8_t addr, uint8_t *pData)
{
/* 如果是数据块(不包含数据块0),则写入 */
if (IsDataBlock(addr))
{
return PCD_WriteBlock(addr, pData);
}
return PCD_ERR;
}
/**
* @brief 读取M1卡中的一块数据到 pData
* @param addr,数据块地址(不读取控制块)
* @param pData,读出的数据,16字节
* @retval 状态值= PCD_OK,成功
*/
char PCD_ReadString(uint8_t addr, uint8_t *pData)
{
/* 如果是数据块(不包含数据块0),则读取 */
if (IsDataBlock(addr))
{
return PCD_ReadBlock(addr, pData);
}
return PCD_ERR;
}
/**
* @DESCRIPTION: 写入钱包金额
* @INPUT ARGS: none
* @OUTPUT ARGS: none
* @NOTE : none
* @param {uint8_t} addr:块地址
* @param {uint32_t} pData:写入的金额
* @return {*} 成功返回PCD_OK
*/
char WriteAmount(uint8_t addr, uint32_t pData)
{
char status;
uint8_t ucComMF522Buf[16];
ucComMF522Buf[0] = (pData & ((uint32_t)0x000000ff));
ucComMF522Buf[1] = (pData & ((uint32_t)0x0000ff00)) >> 8;
ucComMF522Buf[2] = (pData & ((uint32_t)0x00ff0000)) >> 16;
ucComMF522Buf[3] = (pData & ((uint32_t)0xff000000)) >> 24;
ucComMF522Buf[4] = ~(pData & ((uint32_t)0x000000ff));
ucComMF522Buf[5] = ~(pData & ((uint32_t)0x0000ff00)) >> 8;
ucComMF522Buf[6] = ~(pData & ((uint32_t)0x00ff0000)) >> 16;
ucComMF522Buf[7] = ~(pData & ((uint32_t)0xff000000)) >> 24;
ucComMF522Buf[8] = (pData & ((uint32_t)0x000000ff));
ucComMF522Buf[9] = (pData & ((uint32_t)0x0000ff00)) >> 8;
ucComMF522Buf[10] = (pData & ((uint32_t)0x00ff0000)) >> 16;
ucComMF522Buf[11] = (pData & ((uint32_t)0xff000000)) >> 24;
ucComMF522Buf[12] = addr;
ucComMF522Buf[13] = ~addr;
ucComMF522Buf[14] = addr;
ucComMF522Buf[15] = ~addr;
status = PCD_WriteBlock(addr, ucComMF522Buf);
return status;
}
/**
* @DESCRIPTION: 读取钱包金额
* @INPUT ARGS: none
* @OUTPUT ARGS: none
* @NOTE : none
* @param {uint8_t} addr:块地址
* @param {uint32_t} *pData:读出的金额
* @return {*}: 成功返回PCD_OK
*/
char ReadAmount(uint8_t addr, uint32_t *pData)
{
char status = PCD_ERR;
uint8_t j;
uint8_t ucComMF522Buf[16];
status = PCD_ReadBlock(addr, ucComMF522Buf);
if (status != PCD_OK)
return status;
for (j = 0; j < 4; j++)
{
if ((ucComMF522Buf[j] != ucComMF522Buf[j + 8]) && (ucComMF522Buf[j] != ~ucComMF522Buf[j + 4])) // 验证一下是不是钱包的数据
break;
}
if (j == 4)
{
status = PCD_OK;
*pData = ucComMF522Buf[0] + (ucComMF522Buf[1] << 8) + (ucComMF522Buf[2] << 16) + (ucComMF522Buf[3] << 24);
}
else
{
status = PCD_ERR;
*pData = 0;
}
return status;
}
/**
* @brief 修改控制块 addr 的密码A。注意 addr 指的是控制块的地址。
* 必须要校验密码B,密码B默认为6个0xFF,如果密码B也忘记了,那就改不了密码A了
* @note 注意:该函数仅适用于默认的存储控制模式,若是其他的话可能出现问题
* @param addr:[控制块]所在的地址。M1卡总共有16个扇区(每个扇区有:3个数据块+1个控制块),共64个块
* @param pKeyA:指向新的密码A字符串,六个字符,比如 "123456"
* @retval 成功返回 PCD_OK
*/
char ChangeKeyA(uint8_t addr, uint8_t *pKeyA)
{
uint8_t KeyBValue[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // B密钥
uint8_t ucArrayID[4]; // 先后存放IC卡的类型和UID(IC卡序列号)
uint8_t ucComMF522Buf[16];
uint8_t j;
// 寻卡
while (PCD_Request(PICC_REQALL, ucArrayID) != PCD_OK)
{
printf("寻卡失败
");
delay_ms(1000);
}
printf("寻卡成功
");
// 防冲突(当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作)
if (PCD_Anticoll(ucArrayID) == PCD_OK)
{
// 选中卡
PCD_Select(ucArrayID);
// 校验 B 密码
if (PCD_AuthState(PICC_AUTHENT1B, addr, KeyBValue, ucArrayID) != PCD_OK)
{
printf("检验密码B失败
");
}
// 读取控制块里原本的数据(只要修改密码A,其他数据不改)
if (PCD_ReadBlock(addr, ucComMF522Buf) != PCD_OK)
{
printf("读取控制块数据失败
");
return PCD_ERR;
}
// 修改密码A
for (j = 0; j < 6; j++)
ucComMF522Buf[j] = pKeyA[j];
if (PCD_WriteBlock(addr, ucComMF522Buf) != PCD_OK)
{
printf("写入数据到控制块失败
");
return PCD_ERR;
}
printf("密码A修改成功!
");
PCD_Halt();
return PCD_OK;
}
return PCD_ERR;
}
/**
* @brief 按照RC522操作流程写入16字节数据到块 addr
* 函数里校验的是密码B,密码B默认为6个0xFF,也可以校验密码A
* 用法:WriteDataBlock( 1, "123456789
", 10); //字符串不够16个字节的后面补零写入
* @note 注意:该函数仅适用于默认的存储控制模式,若是其他的话可能出现问题
* 注意:使用该函数要注意 addr 是块0、数据块还是控制块,该函数内部不对此做判断
* @param addr:任意块地址。M1卡总共有16个扇区(每个扇区有:3个数据块+1个控制块),共64个块
* @param pData:指向要写入的数据,最大16个字符
* @param Len:要写入数据的字节数
* @retval 成功返回 PCD_OK
*/
char WriteDataBlock(uint8_t addr, uint8_t *pData, uint8_t Len)
{
uint8_t KeyBValue[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // B密钥
uint8_t ucArrayID[4]; // 先后存放IC卡的类型和UID(IC卡序列号)
uint8_t ucComMF522Buf[16];
uint8_t j;
// 寻卡
while (PCD_Request(PICC_REQALL, ucArrayID) != PCD_OK)
{
printf("寻卡失败
");
delay_ms(1000);
}
printf("寻卡成功
");
// 防冲突(当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作)
if (PCD_Anticoll(ucArrayID) == PCD_OK)
{
// 选中卡
PCD_Select(ucArrayID);
// 校验 B 密码
if (PCD_AuthState(PICC_AUTHENT1B, addr, KeyBValue, ucArrayID) != PCD_OK)
{
printf("检验密码B失败
");
}
// 拷贝 pData 里的 Len 个字符到 ucComMF522Buf
for (j = 0; j < 16; j++)
{
if (j < Len)
ucComMF522Buf[j] = pData[j];
else
ucComMF522Buf[j] = 0; // 16个字节若是未填满的字节置0
}
// 写入字符串
if (PCD_WriteBlock(addr, ucComMF522Buf) != PCD_OK)
{
printf("写入数据到数据块失败
");
return PCD_ERR;
}
printf("写入数据成功!
");
PCD_Halt();
return PCD_OK;
}
return PCD_ERR;
}
/**
* @brief 按照RC522操作流程读取块 addr
* 函数里校验的是密码B,密码B默认为6个0xFF,也可以校验密码A
* 用法:ReadDataBlock( 1, databuf); // databuf 至少为16字节:uint8_t databuf[16];
* @note 注意:该函数仅适用于默认的存储控制模式,若是其他的话可能出现问题
* 注意:使用该函数要注意 addr 是块0、数据块还是控制块,该函数内部不对此做判断
* @param addr:任意块地址。M1卡总共有16个扇区(每个扇区有:3个数据块+1个控制块),共64个块
* @param pData:指向读取到的数据,包含16个字符
* @retval 成功返回 PCD_OK
*/
char ReadDataBlock(uint8_t addr, uint8_t *pData)
{
uint8_t KeyBValue[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // B密钥
uint8_t ucArrayID[4]; // 先后存放IC卡的类型和UID(IC卡序列号)
// 寻卡
while (PCD_Request(PICC_REQALL, ucArrayID) != PCD_OK)
{
printf("寻卡失败
");
delay_ms(1000);
}
printf("寻卡成功
");
// 防冲突(当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作)
if (PCD_Anticoll(ucArrayID) == PCD_OK)
{
// 选中卡
PCD_Select(ucArrayID);
// 校验 B 密码
if (PCD_AuthState(PICC_AUTHENT1B, addr, KeyBValue, ucArrayID) != PCD_OK)
{
printf("检验密码B失败
");
}
// 读取数据块里的数据到 pData
if (PCD_ReadBlock(addr, pData) != PCD_OK)
{
printf("读取数据块失败
");
return PCD_ERR;
}
printf("读取数据成功!
");
PCD_Halt();
return PCD_OK;
}
return PCD_ERR;
}
4.3 UART串口printf,scanf函数串口重定向
因本实验中的调试信息需要通过串口输出,Nucleo-446RE提供了利用USB的虚拟串口(串口2)。
这部分内容与基础篇007. 串行通信(一)--阻塞方式发送接收基本相同,只是把UART1换成UART2。以下仅提供代码截图,请大家参考前文实验。
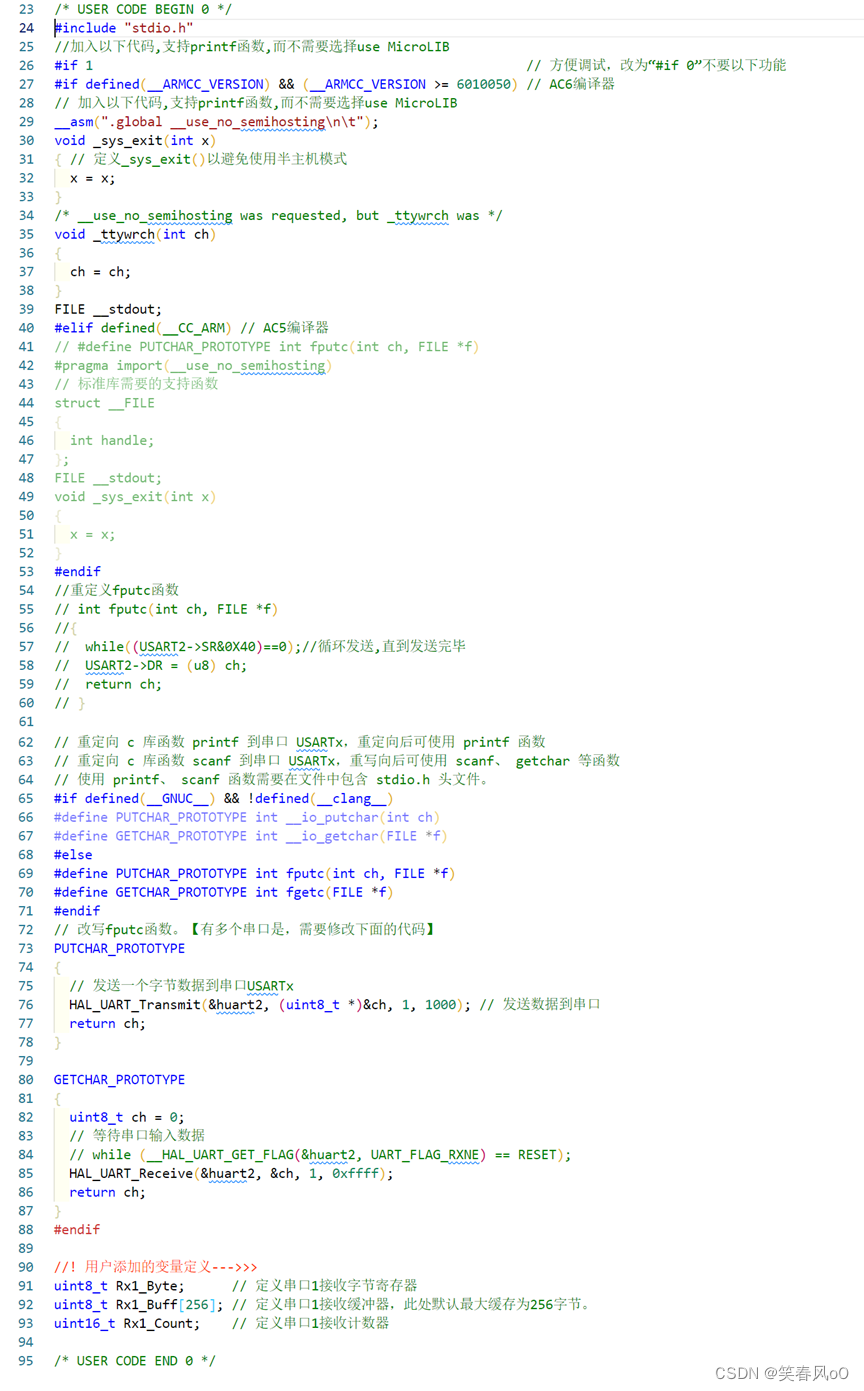
在usart.c文件的user code 0 区域内:
输入如下内容:
4.4 main()函数修改
修改Main.c函数头文件:

在下图红框区域添加代码:
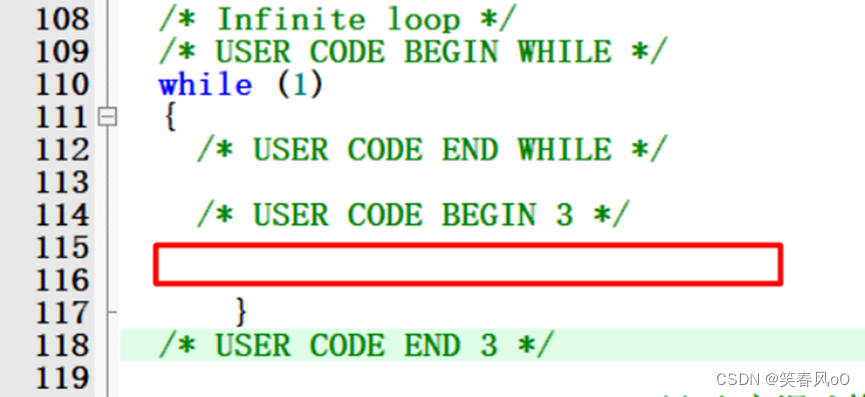
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
delay_ms(1000);
// if(!EntranceGuard(readUid, RfidIndicator))
if (!EntranceGuard(readUid, NULL))
{
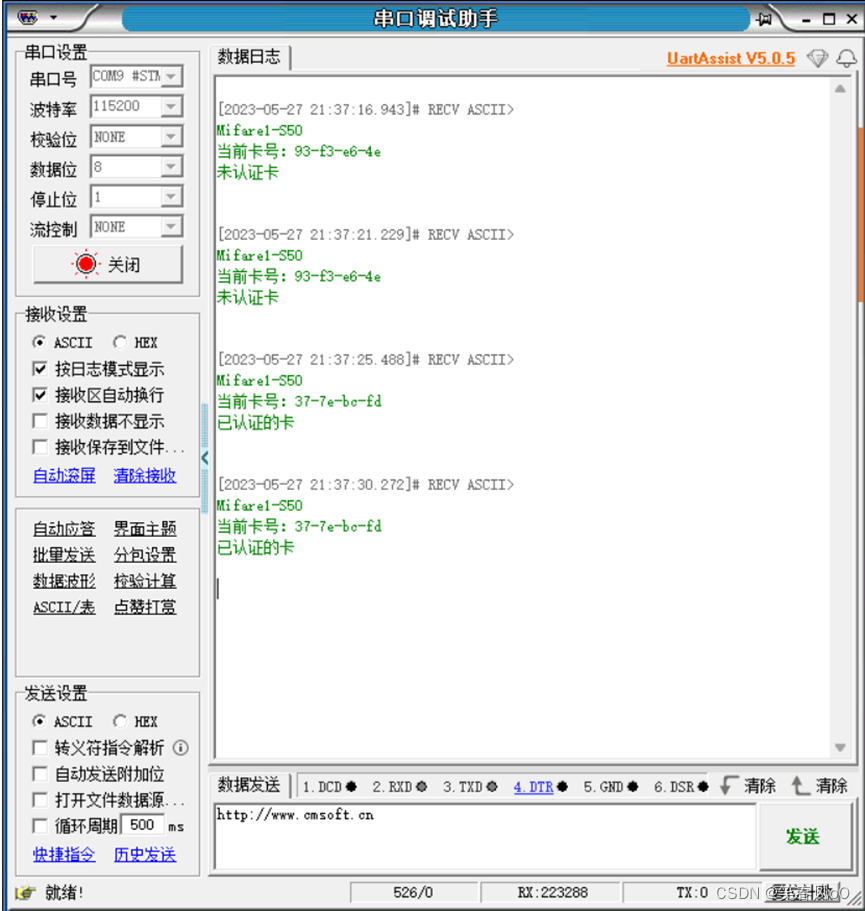
printf("当前卡号:%x-%x-%x-%x
", readUid[0], readUid[1], readUid[2], readUid[3]);
if (!strncmp((char *)readUid, (char *)UID, 4))
{
// TODO
// 插入比对卡号正确时的处理程序,如打开门禁
printf("已认证的卡
");
DoorSensor();
}
else
{
// TODO
// 插入比对卡号错误时的处理程序
printf("未认证卡
");
}
HAL_Delay(2000);
}5.调试与验证
如果你需要AC5编译器,请参考如下博文安装设置:
Keil MDK5.37以上版本自行添加AC5(ARMCC)编译器的方法_armcc下载
程序编译通过后,可将其下载到开发板进行验证
实验需要使用串口调试助手验证。
程序编译通过后,下载到开发板:
打开串口调试助手,用RFID卡在读卡器上测试,实验结果如下:
6.总结
本实验是STM32驱动RFID模块的第二部分,基础知识已在上一篇讲述:
关于RFID基础知识,请参考博文:
基础篇010.1 STM32驱动RC522 RFID模块之一:基础知识






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结