您现在的位置是:首页 >技术教程 >demlia机器人建模与装配网站首页技术教程
demlia机器人建模与装配
简介demlia机器人建模与装配
1 可以用catia中的模型或其他三维建模软件中的模型转化为step格式即可
2 在demlia中打开
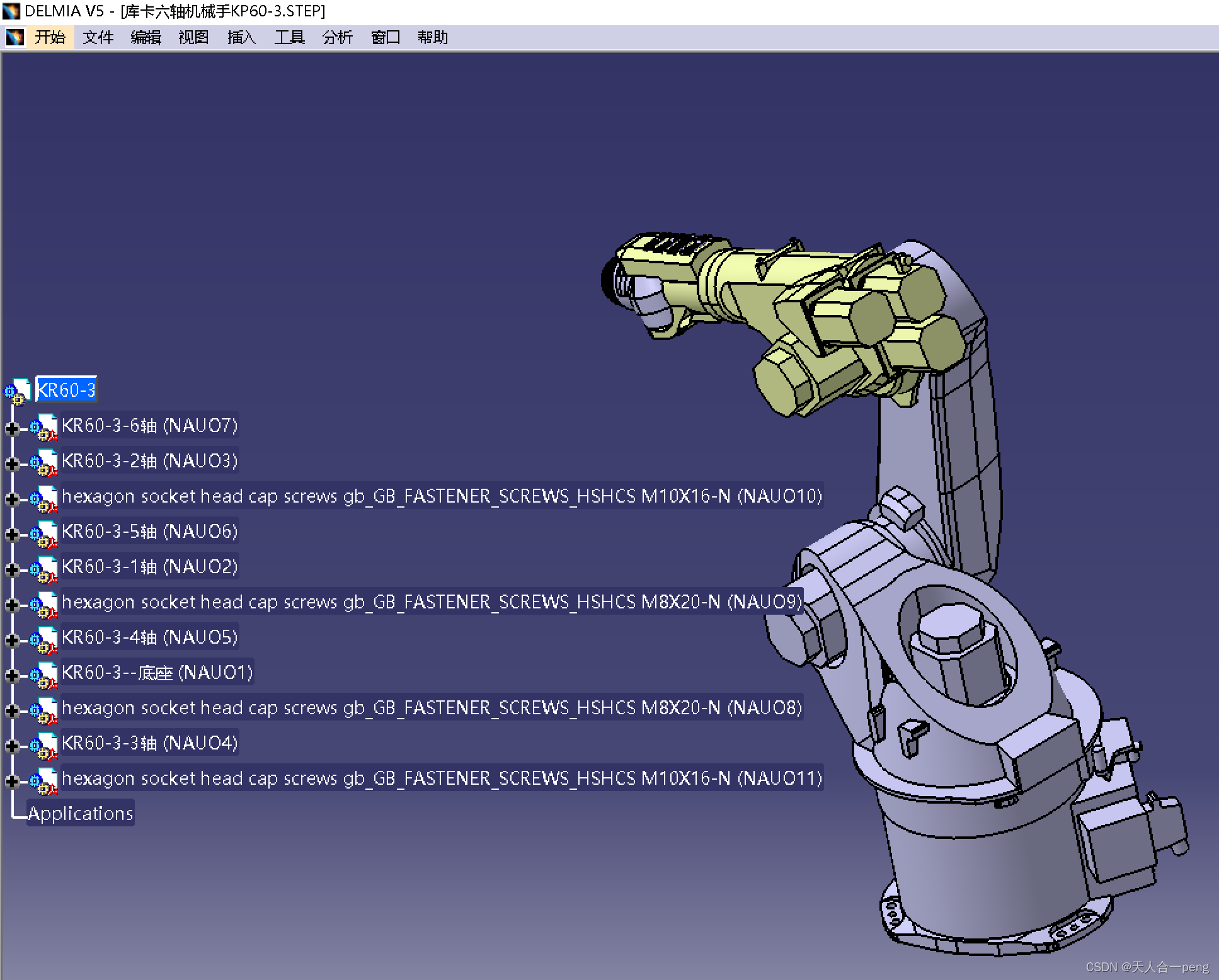
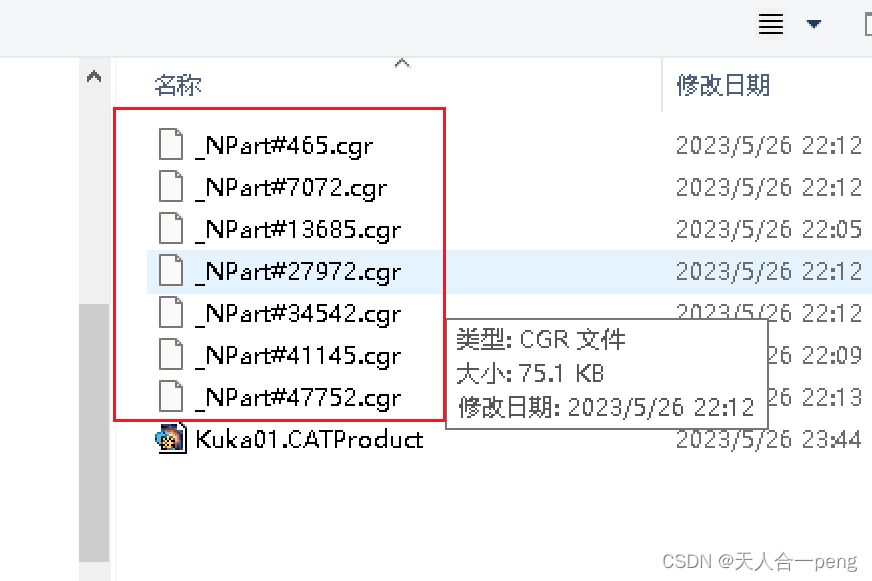
3 打开单个零件保存为cgr格式
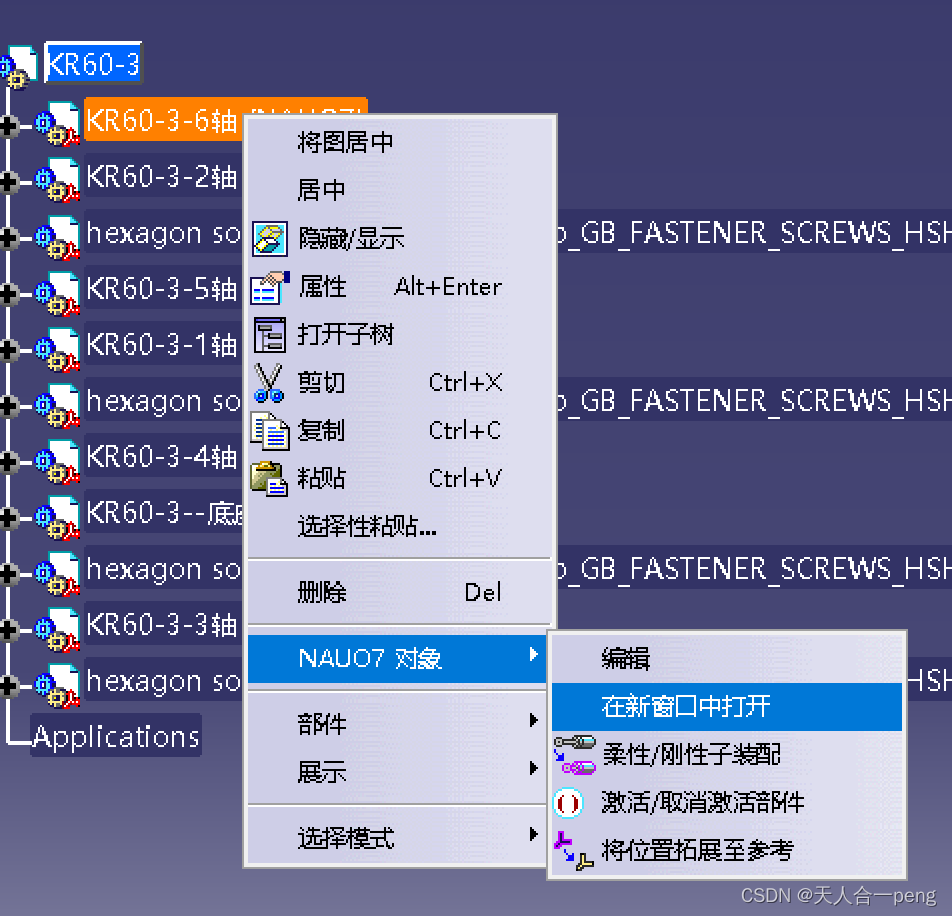

对机械臂所有零件都做同样的转化
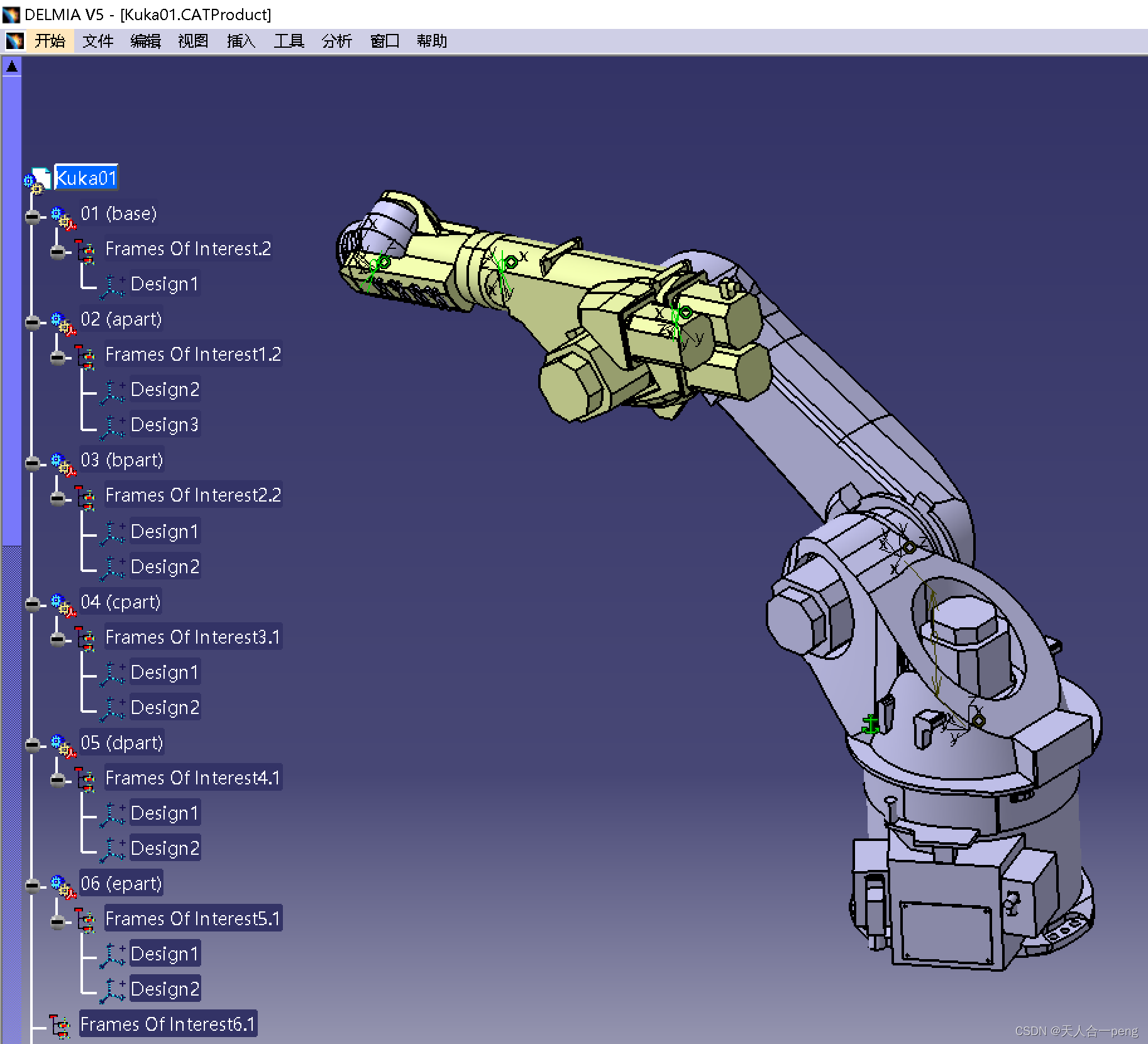
4 新建装配设计,并导入带有坐标的零件
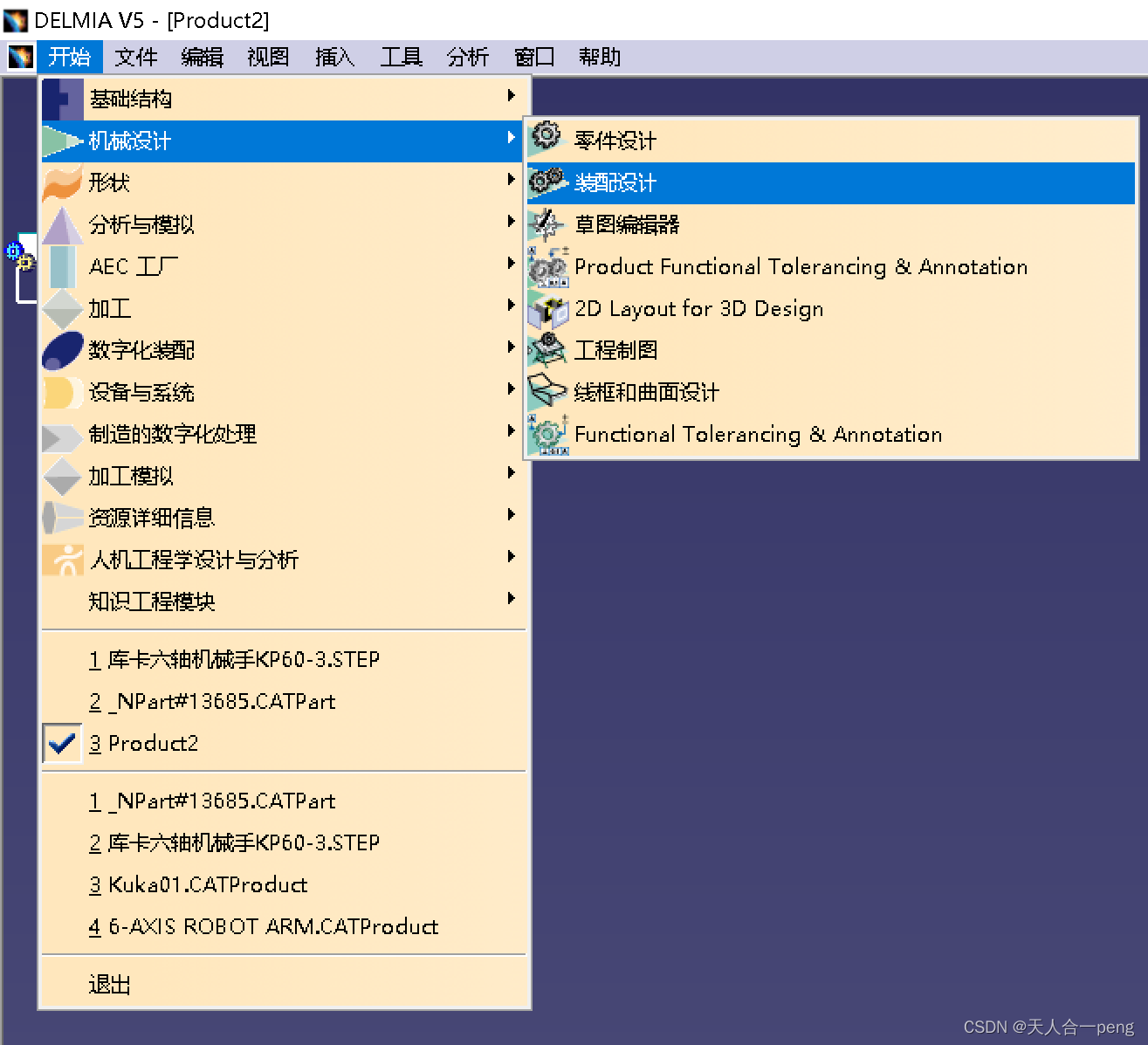
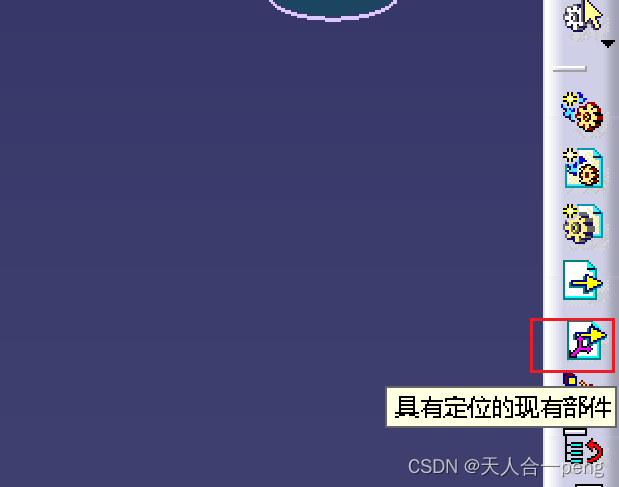
将转化后的零件都选中导入即是装配好的
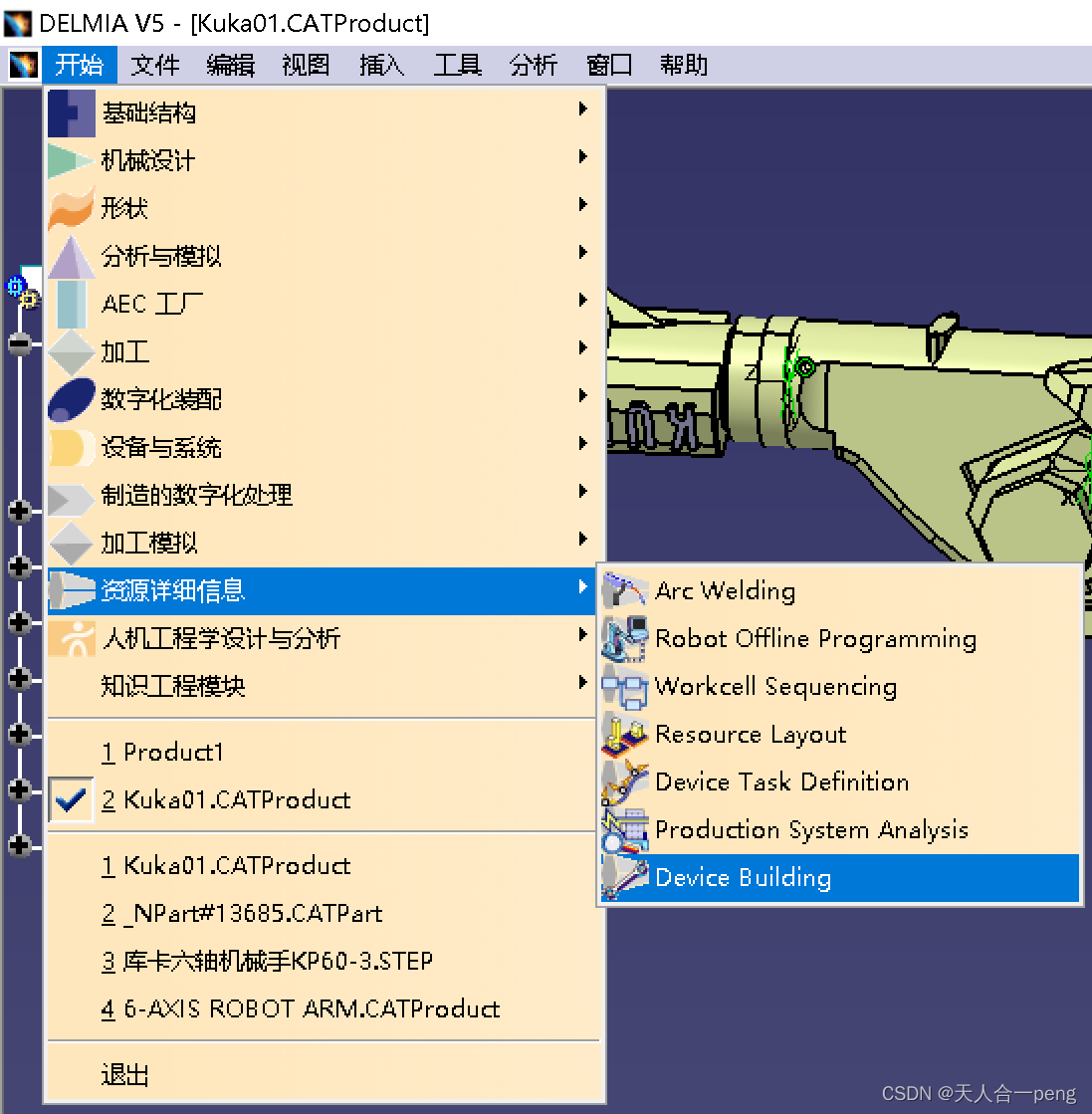
5 将模式修改为device building
6 建立坐标轴,给每个零件上相对旋转或平移的地方都选建立frames of interest
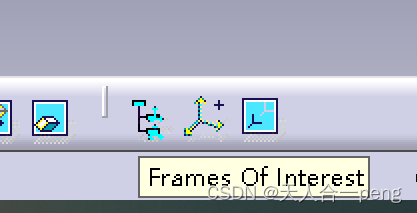
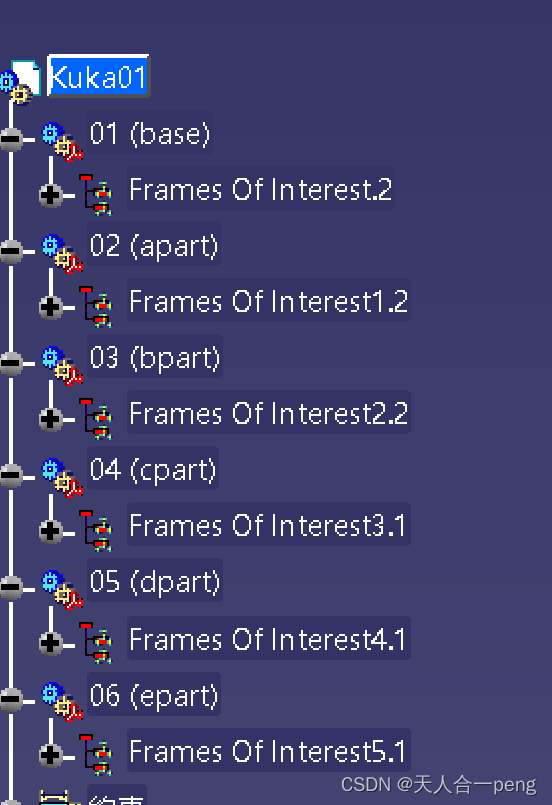
然后再建立Frame Type
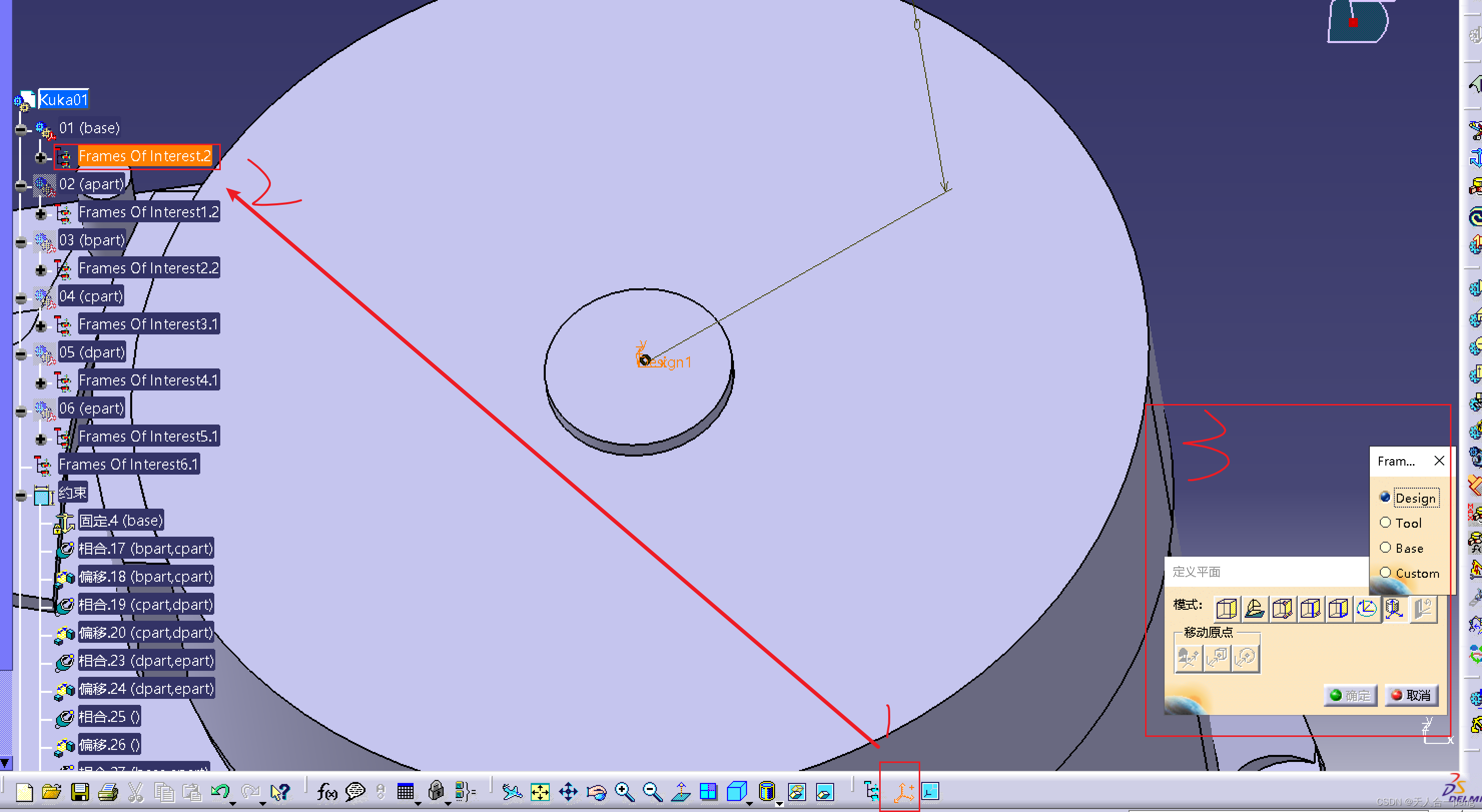
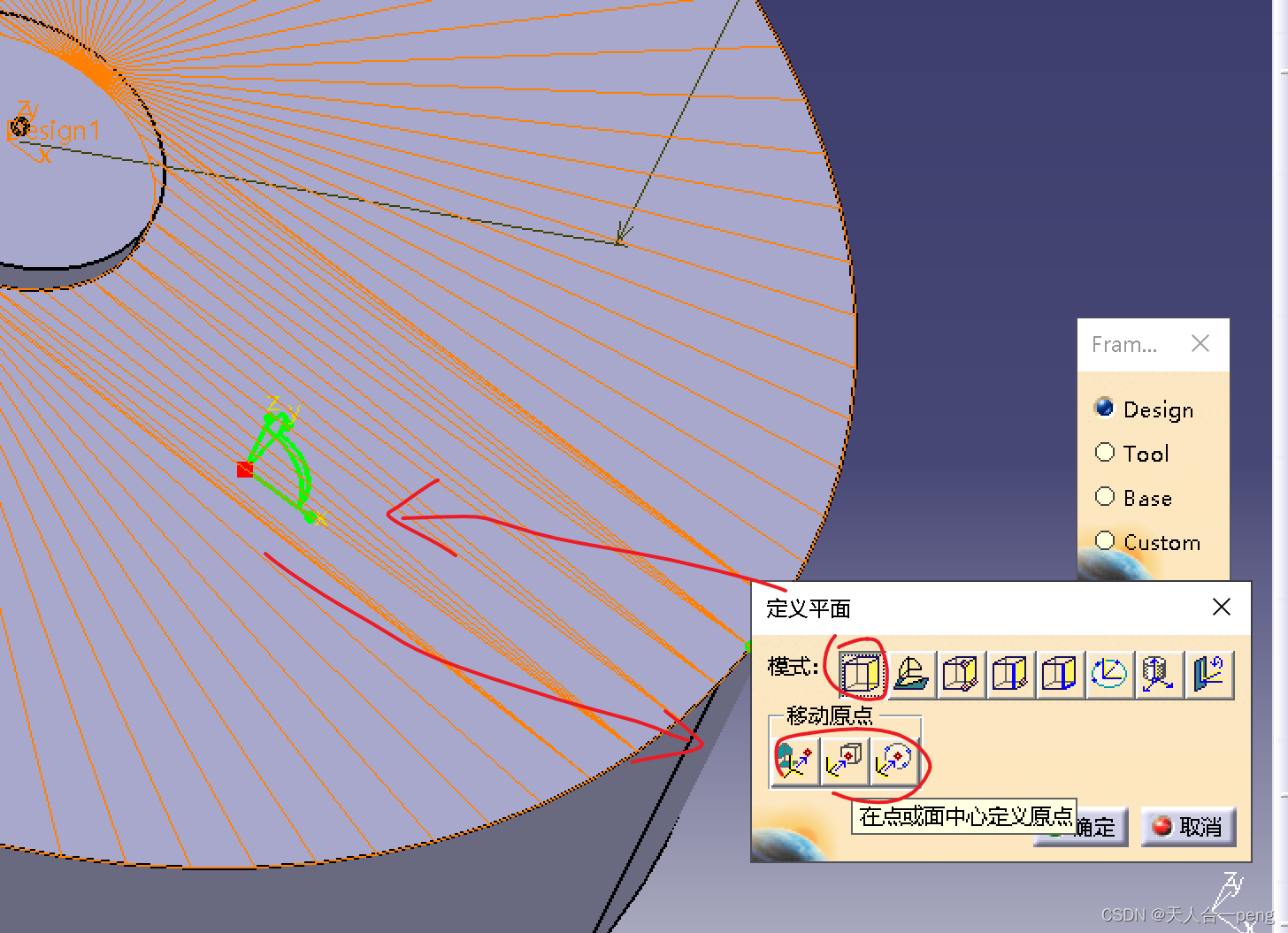
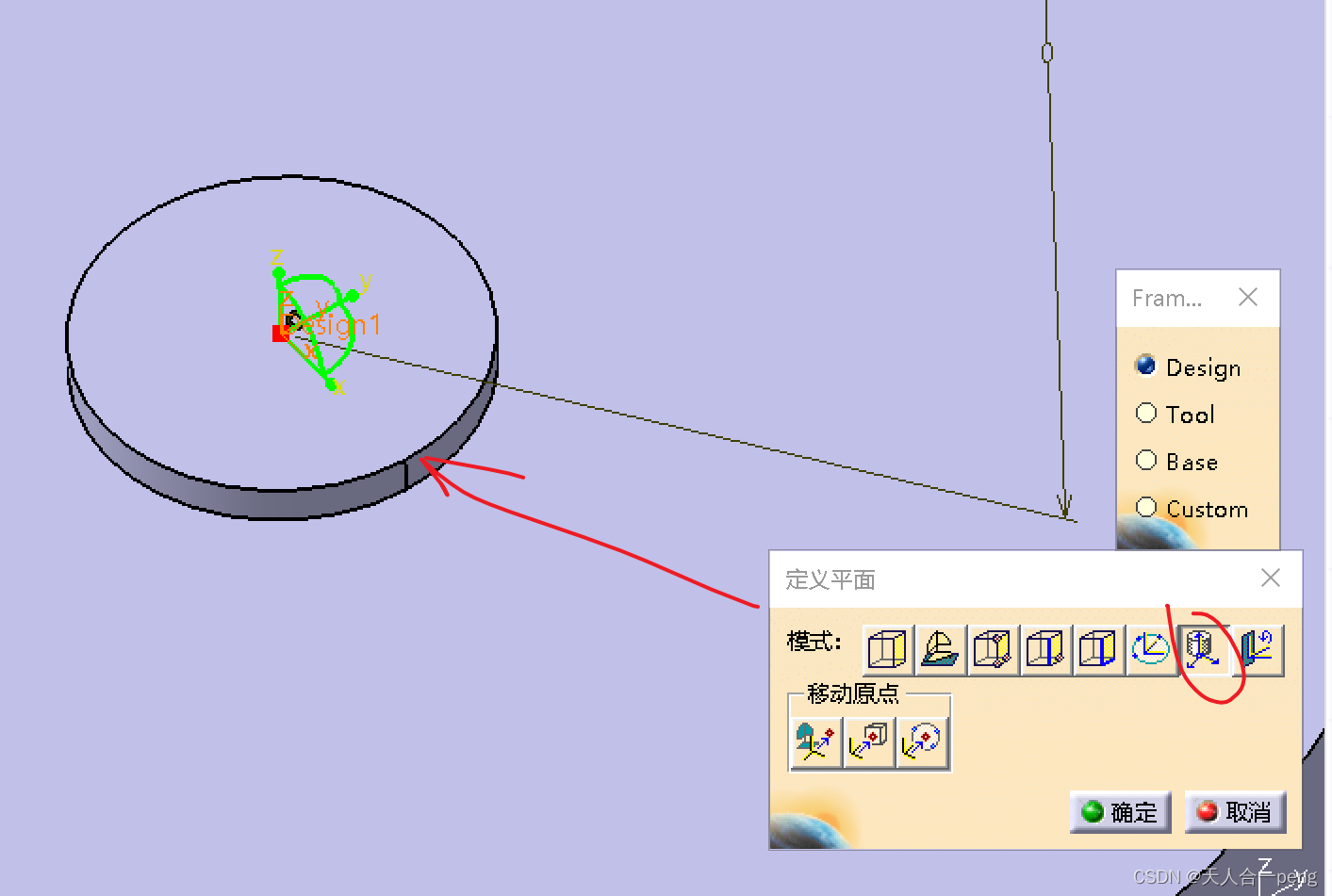
先定义在面上,然后将其移动到中心,可以是平面或三点确定的圆----
注意Z轴应该是向上
这个坐标建立好后,与之配合的零件的坐标是重合的,通过激活frame type然后单击配合的零件的frames of interest,之后如下操作即可
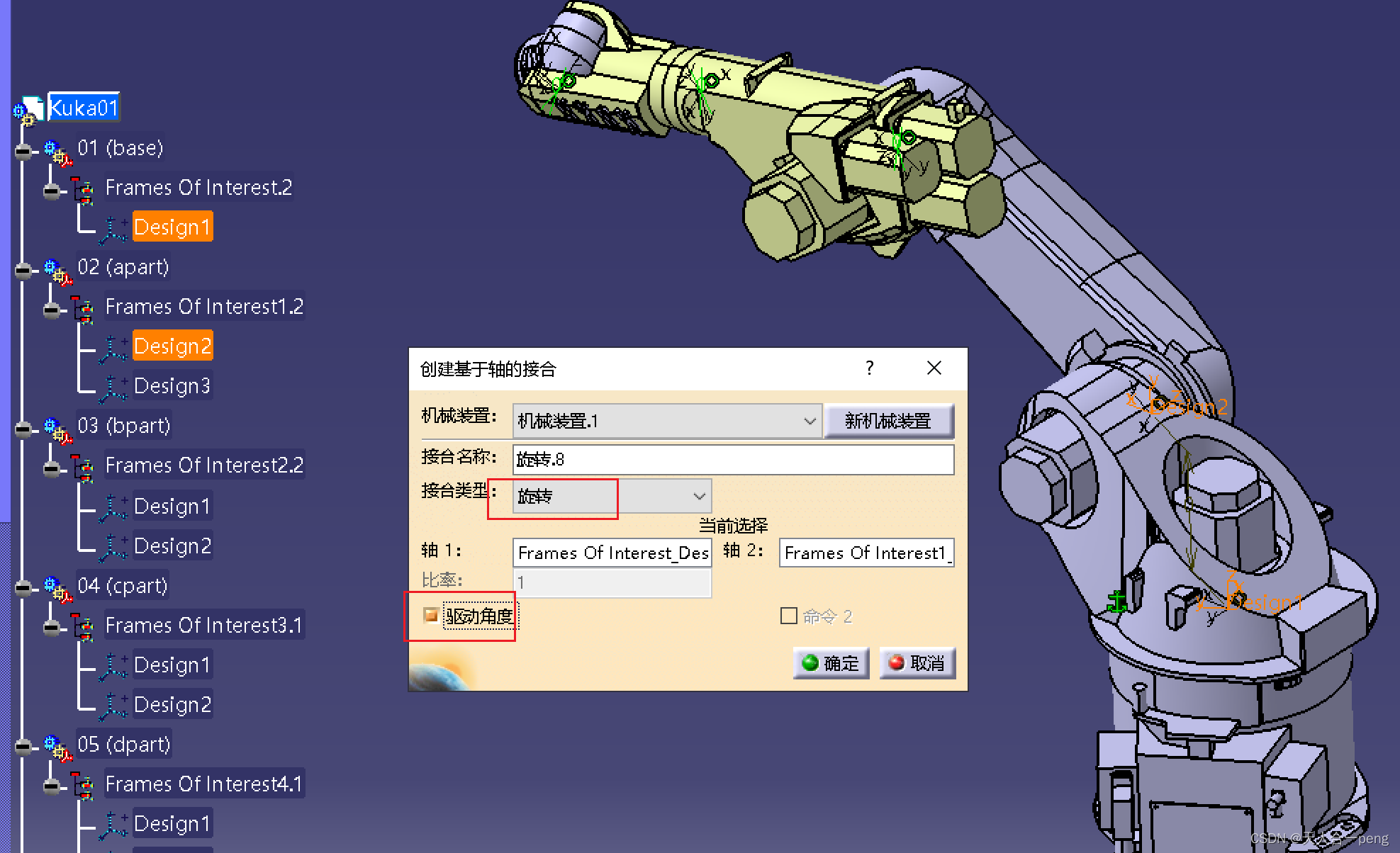
7 添加机械运动并添加约束

之后 将机械臂底座固定
添加相对的旋转约束

依次添加,应该会显示可以模拟机械装置。或都过程中一步提示无法模拟机械装置,如果操作正确添加的约束是合理的,将所有约束添加后最后会显示可以模拟机械装置,应该是最后一定要显示可以模拟机械装置。
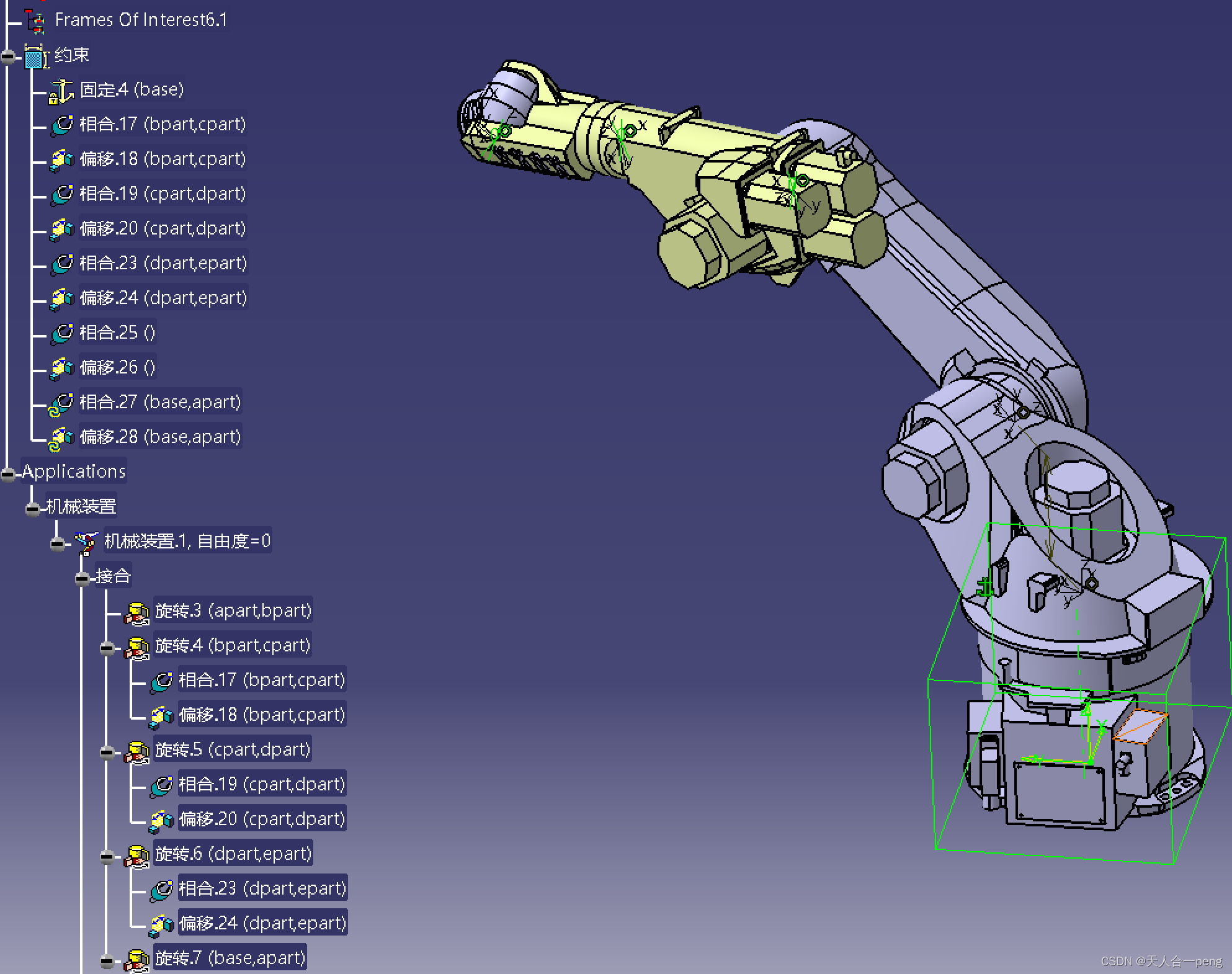
最后应该是自由度为0
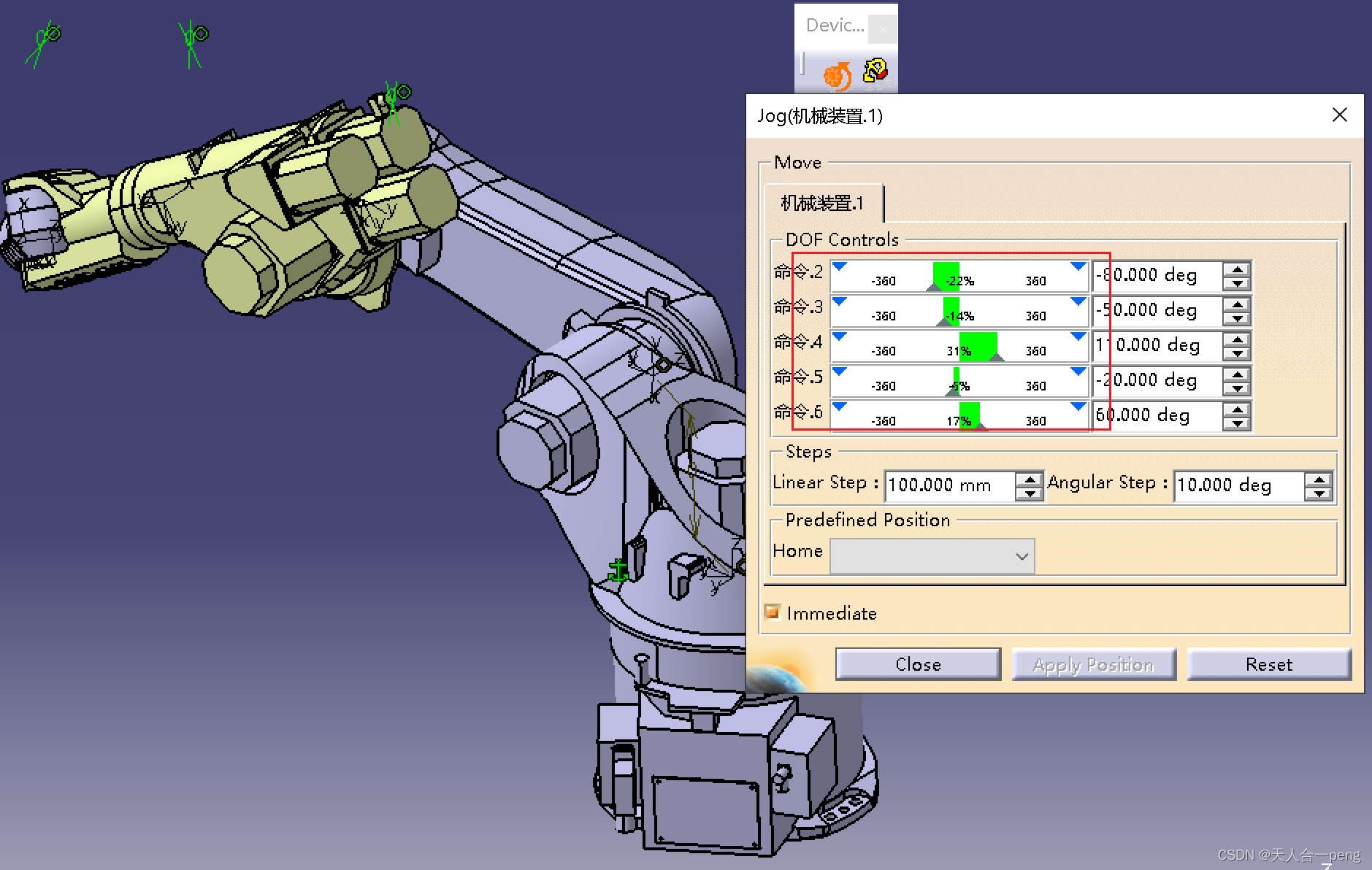
8 使用jog mechanism命令
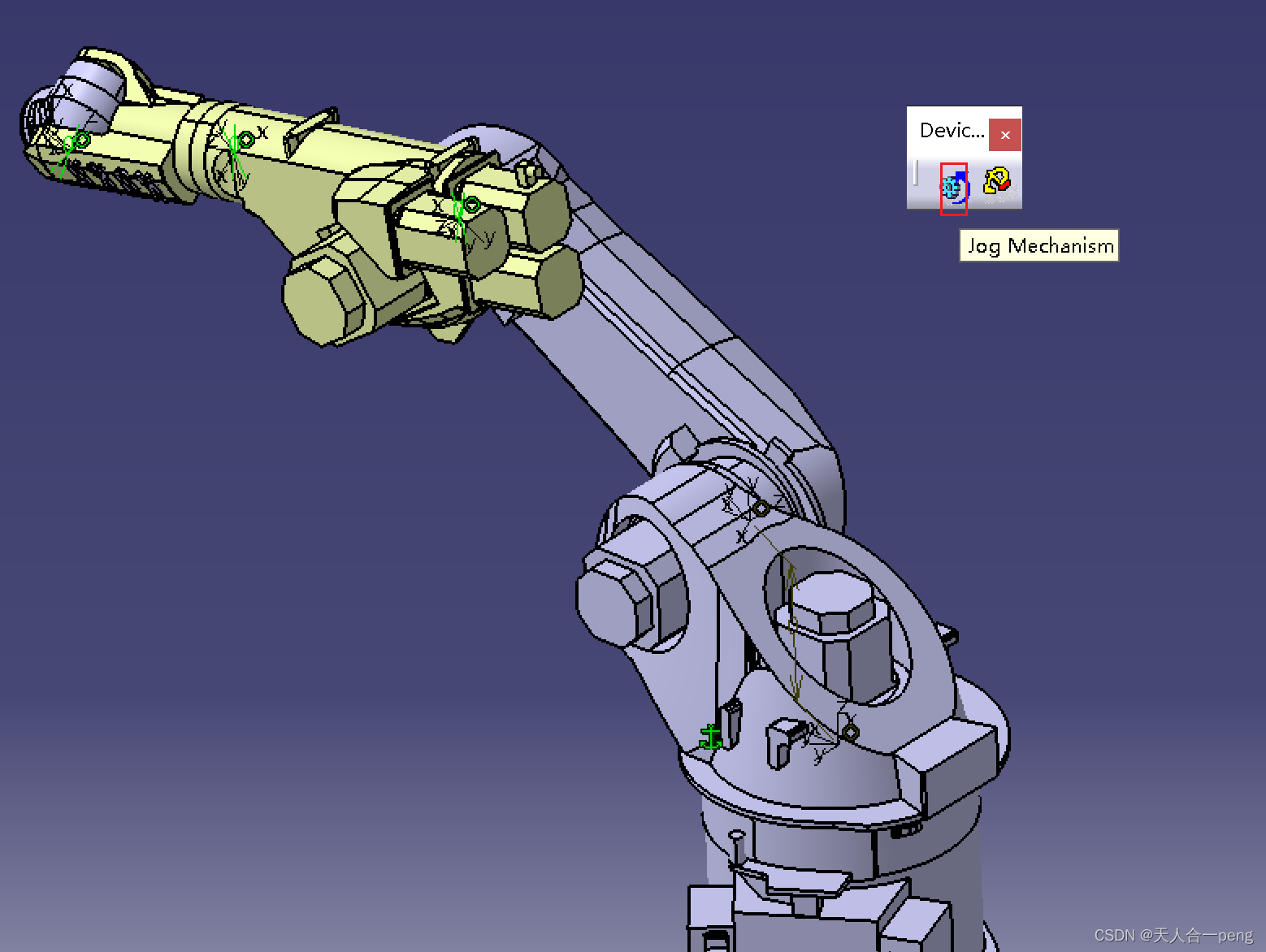
可以手动让机器人运行了
参考学习视频
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结