您现在的位置是:首页 >技术杂谈 >【ROS2】install micro_ros网站首页技术杂谈
【ROS2】install micro_ros
本文参考b站up:“照祥同学”的教程来的,中间一些细节的操作谨以此文作为补充,或者说是我在按照教程走的时候遇到的问题记录。视频链接:第二节:安装micro_ros 的 Arduino 开发环境_哔哩哔哩_bilibili
1. 安装和配置rosdep
根据照祥同学里面说的鱼香ros的一键配置rosdep即可。
wget http://fishros.com/install -O fishros && . fishros
安装成功。
2. 安装micro-ROS
继续按照上面视频第二节的教程执行以下命令
# Source the ROS 2 installation
source /opt/ros/$ROS_DISTRO/setup.bash
# Create a workspace and download the micro-ROS tools
mkdir microros_ws
cd microros_ws
git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git
src/micro_ros_setup
# Update dependencies using rosdep
sudo apt update && rosdep update
rosdep install --from-paths src --ignore-src -y
# Install pip
sudo apt-get install python3-pip
# Build micro-ROS tools and source them
colcon build
source install/local_setup.bash执行colcon build后,目录/microros_ws/src/下出现micro_ros_setup文件。
在上述命令之后,接下来Second: Creating a new firmware workspace时,执行以下命令出现报错:
# Download micro-ROS agent packages
ros2 run micro_ros_setup create_agent_ws.sh
# Build step
ros2 run micro_ros_setup build_agent.sh在执行ros2 run micro_ros_setup create_agent_ws.sh时,如果只出现ros2.repos文件,则继续执行build_agent.sh时会报以下错误:
micro_ros_agent specified with --packages-up-to was not found
我这里是了几种方法发现是访问git的速度过慢导致的,所以需要在github代理加速下载。
解决方法:
1. 打开~/microros_ws/src/micro_ros_setup/scripts/目录下的create_ws.sh文件,然后修改ros2.repos的链接
cd ~/microros_ws/src/micro_ros_setup/scripts
sudo gedit create_ws.sh将43行的https://raw.githubusercontent.com/ros2/ros2/foxy/ros2.repos修改为
https://ghproxy.com/https://raw.githubusercontent.com/ros2/ros2/foxy/ros2.repos2. 保存关闭后,再利用国内镜像加速github下载,修改如下
git config --global url."https://kgithub.com/".insteadOf https://github.com/
查看当前设置:
git config --global -l如下就替换国内镜像了

3. 然后继续执行:
colcon build
source install/local_setup.bash
ros2 run micro_ros_setup create_agent_ws.sh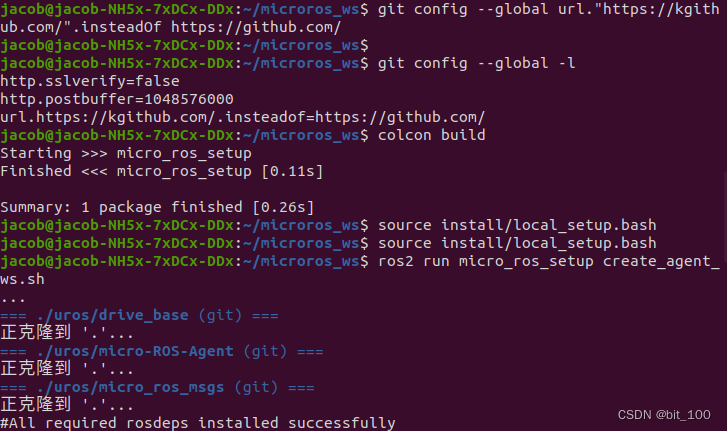
4. 执行create_aget_ws.sh后,需要断开git config .insteadOf 的链接,不然在build_agent.sh时会报错,执行以下命令:
git config --global --remove-section url."https://kgithub.com/"
5. 然后就可以build_agent
# Build step
ros2 run micro_ros_setup build_agent.sh
source install/local_setup.bash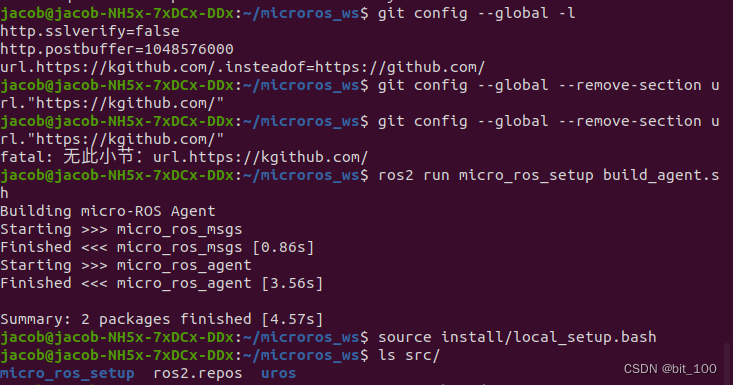
参考链接:
1. https://www.bilibili.com/video/BV1LM4y1y7TD/?spm_id_from=333.788&vd_source=02b534a241b69ff2ec481149c83805d4
2. https://blog.csdn.net/weixin_44413445/article/details/129747674






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结