您现在的位置是:首页 >技术教程 >【网络编程】demo版TCP网络服务器实现网站首页技术教程
【网络编程】demo版TCP网络服务器实现
文章目录
一、引入
UDP和TCP的区别:
对于TCP协议有几个特点:
1️⃣ 传输层协议
2️⃣ 有连接(正式通信前要先建立连接)
3️⃣ 可靠传输(在内部帮我们做可靠传输工作)
4️⃣ 面向字节流
对于UDP协议有几个特点:
1️⃣ 传输层协议
2️⃣ 无连接
3️⃣ 不可靠传输
4️⃣ 面向数据报
可以看到TCP对比UDP会建立链接。
其他的接口跟UDP其实没什么区别:【网络编程】demo版UDP网络服务器实现
二、服务端实现
2.1 创建套接字socket
在通信之前要先把网卡文件打开。
#include <sys/types.h> /* See NOTES */
#include <sys/socket.h>
int socket(int domain, int type, int protocol);
RETURN VALUE
On success, a file descriptor for the new socket is returned.
On error, -1 is returned, and errno is set appropriately.
这个函数的作用是打开一个文件,把文件和网卡关联起来。
参数介绍:
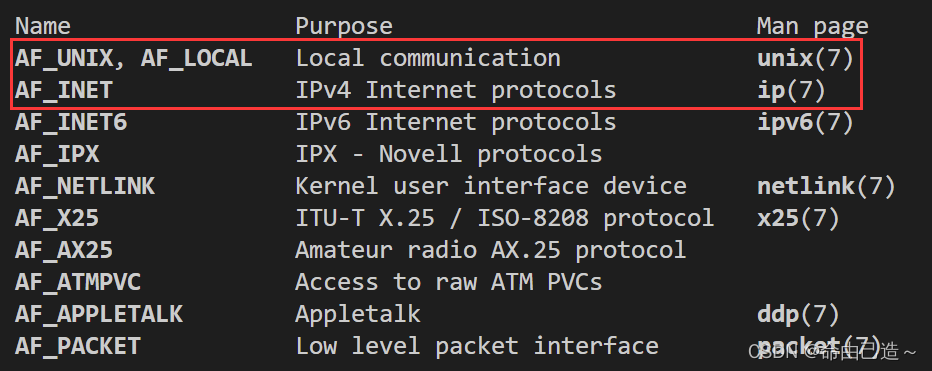
domain:一个域,标识了这个套接字的通信类型(网络或者本地)。
只用关注上面两个类,第一个AF_UNIX表示本地通信,而AF_INET表示网络通信。
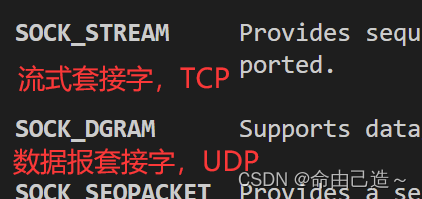
type:套接字提供服务的类型。
这一章我们讲的式TCP,所以使用SOCK_STREAM。
protocol:想使用的协议,默认为0即可,因为前面的两个参数决定了,就已经决定了是TCP还是UDP协议了。
返回值:
成功则返回打开的文件描述符(指向网卡文件),失败返回-1。
而从这里我们就联想到系统中的文件操作,未来各种操作都要通过这个文件描述符,所以在服务端类中还需要一个成员变量表示文件描述符。
#pragma once
#include <iostream>
#include <string>
#include <sys/types.h>
#include <sys/socket.h>
#include "log.hpp"
class TCPServer
{
static const uint16_t gport = 8080;
public:
TCPServer(cosnt uint16_t& port = gport)
: _sock(-1)
, _port(port)
{}
void InitServer()
{
_sock = socket(AF_INET, SOCK_STREAM, 0);
if(_sockfd == -1)
{
std::cerr << "create socket error" << std::endl;
exit(1);
}
std::cout << "create socket success" << std::endl;
}
void start()
{}
private:
int _sock;
uint16_t _port;
};
2.2 绑定bind
#include <sys/socket.h>
int bind(int socket, const struct sockaddr *address,
socklen_t address_len);
RETURN VALUE
Upon successful completion, bind() shall return 0;
otherwise, -1 shall be returned and errno set to indicate the error.
参数介绍:
socket:创建套接字的返回值。
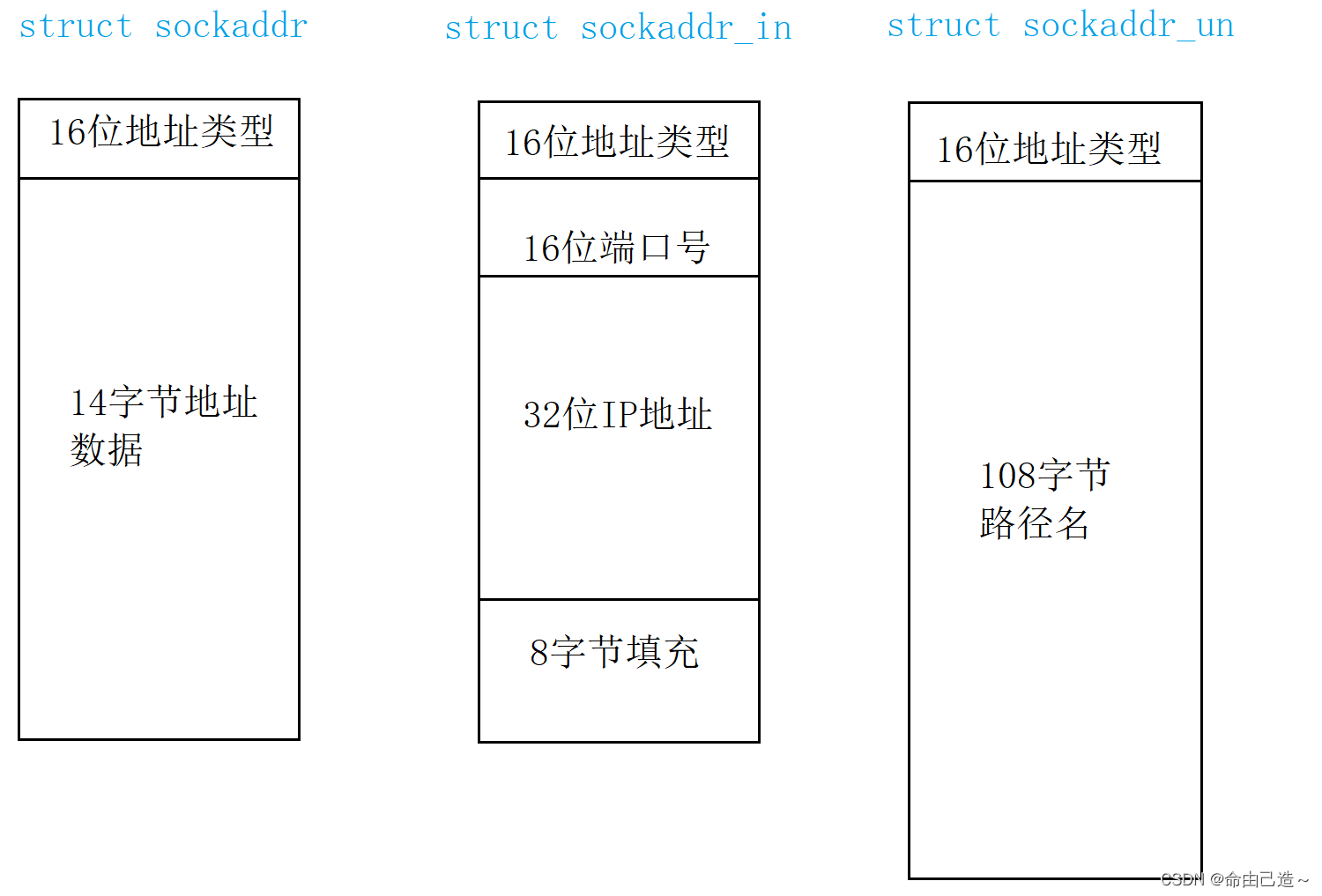
address:通用结构体(【网络编程】socket套接字有详细介绍)。
address_len:传入结构体的长度。
所以我们要先定义一个sockaddr_in结构体填充数据,在传递进去。
然后就是跟UDP一样,先初始化结构体,再处理IP和端口。
要注意IP要绑定任意IP也就是INADDR_ANY。
至于为什么再上一章【网络编程】demo版UDP网络服务器实现有过详细讲解。
void InitServer()
{
_sock = socket(AF_INET, SOCK_STREAM, 0);
if(_sockfd == -1)
{
std::cerr << "create socket error" << std::endl;
exit(1);
}
std::cout << "create socket success" << std::endl;
struct sockaddr_in si;
// 初始化结构体
bzero(&si, sizeof si);
si.sin_family = AF_INET;
si.sin_port = htons(_port);// 主机转网络序列
si.sin_addr.s_addr = INADDR_ANY;
if(bind(_sock, (struct sockaddr*)&si, sizeof si) < 0)
{
std::cout << "bind socket error" << std::endl;
exit(1);
}
std::cout << "bind socket success" << std::endl;
}
2.3 设置监听状态listen
TCP跟UDP的不同在这里就体现了出来。
要把socket套接字的状态设置为listen状态。只有这样才能一直获取新链接,接收新的链接请求。
举个例子:
我们买东西如果出现了问题会去找客服,如果客服不在那么就回复不了,所以规定了客服在工作的时候必须要时刻接收回复消息,这个客服所处的状态就叫做监听状态。
#include <sys/types.h> /* See NOTES */
#include <sys/socket.h>
int listen(int sockfd, int backlog);
RETURN VALUE
On success, zero is returned.
On error, -1 is returned, and errno is set appropriately.
关于第二个参数backlog后边讲TCP协议的时候介绍,目前先直接用。
static const int gbacklog = 10;
void InitServer()
{
_sock = socket(AF_INET, SOCK_STREAM, 0);
if(_sock == -1)
{
std::cerr << "create socket error" << std::endl;
exit(1);
}
std::cout << "create socket success" << std::endl;
struct sockaddr_in si;
// 初始化结构体
bzero(&si, sizeof si);
si.sin_family = AF_INET;
si.sin_port = htons(_port);// 主机转网络序列
si.sin_addr.s_addr = INADDR_ANY;
if(bind(_sock, (struct sockaddr*)&si, sizeof si) < 0)
{
std::cout << "bind socket error" << std::endl;
exit(1);
}
std::cout << "bind socket success" << std::endl;
// 设置监听状态
if(listen(_sock, gbacklog) < 0)
{
std::cout << "listen socket error" << std::endl;
exit(1);
}
std::cout << "listen socket success" << std::endl;
}
2.4 获取新链接accept
上面初始化完毕,现在开始就是要运行服务端,而TCP不能直接发数据,因为它是面向链接的,必须要先建立链接。
#include <sys/types.h> /* See NOTES */
#include <sys/socket.h>
int accept(int sockfd, struct sockaddr *addr, socklen_t *addrlen);
RETURN VALUE
On success, these system calls return a nonnegative integer that is a descriptor for the accepted socket.
On error, -1 is returned, and errno is set appropriately.
参数介绍:
sockfd文件描述符,找到套接字
addr输入输出型参数,是一个结构体,用来获取客户端的信息。
addrlen输入输出型参数,客户端传过来的结构体大小。
返回值:
成功返回一个文件描述符
失败返回-1
而我们知道sockfd本来就是一个文件描述符,那么这个返回的文件描述符是什么呢?
举个例子:
我们去吃饭的时候会发现每个店铺门口都会有人来招揽顾客,这个人把我们领进去门店后,然后他就会继续站在门口继续招揽顾客,而我们会有里面的服务员来招待我们,给我们提供服务。
这里的揽客的人就是sockfd,而服务员就是返回值的文件描述符。
意思就是sockfd的作用就是把链接从底层获取上来,返回值的作用就是跟客户端通信。
从这里就知道了成员变量中的_sock并不是通信用的套接字,而是获取链接的套接字。为了方便观察,我们可以把所有的_sock换成_listensock。
void start()
{
while(1)
{
// 获取新链接
struct sockaddr_in si;
socklen_t len = sizeof si;
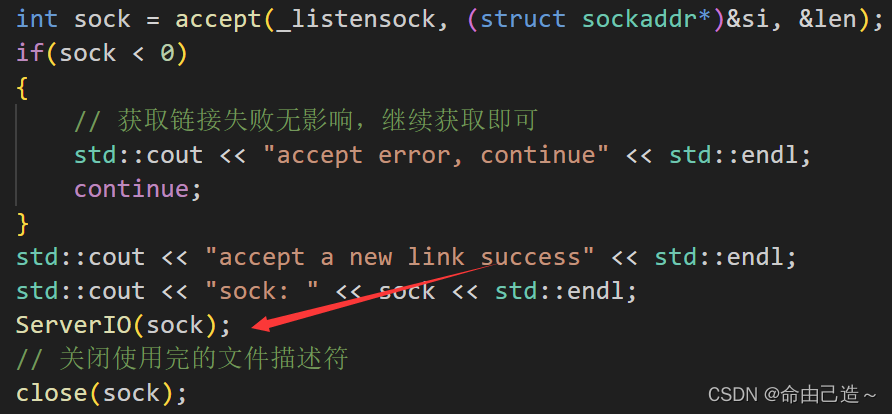
int sock = accept(_listensock, (struct sockaddr*)&si, &len);
if(sock < 0)
{
// 获取链接失败无影响,继续获取即可
std::cout << "accept error, continue" << std::endl;
continue;
}
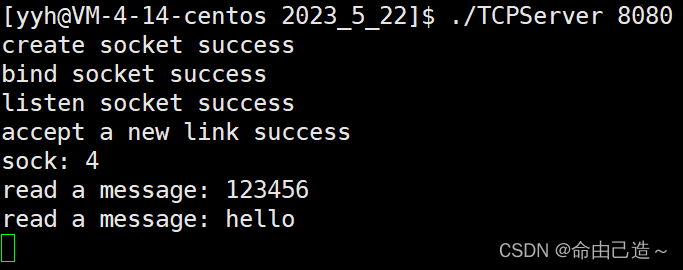
std::cout << "accept a new link success" << std::endl;
std::cout << "sock: " << sock << std::endl;
}
}
2.5 获取信息与返回信息(文件操作)
上面获取到了通信用的套接字sock,而因为TCP通信是面向字节流的,所以后续通信全部是用文件操作(IO),因为文件也是面向字节流的。
IO的操作我们可以封装一个函数。
void ServerIO(int sock)
{
char buf[1024];
// 接收消息
while(1)
{
ssize_t n = read(sock, buf, sizeof buf - 1);
if(n > 0)
{
buf[n] = '�';
std::cout << "read a message: " << buf << std::endl;
// 把消息发送回去
std::string outbuf;
outbuf += "Server[echo]#";
outbuf += buf;
write(sock, outbuf.c_str(), outbuf.size());
}
else if(n == 0)
{
// 代表客户端退出
std::cout << "Client quit" << std::endl;
break;
}
}
}
当IO完后要记得关闭文件描述符sock,不然会导致可用描述符越来越少。
验证发现可以运行

三、客户端实现
3.1 创建套接字socket
Socket可以看成在两个程序进行通讯连接中的一个端点,一个程序将一段信息写入Socket中,该Socket将这段信息发送给另外一个Socket中,使这段信息能传送到其他程序中。
所以客户端也需要一个套接字。
void initClient()
{
_sock = socket(AF_INET, SOCK_STREAM, 0);
if(_sock < 0)
{
std::cout << "create socket error" << std::endl;
exit(1);
}
std::cout << "create socket success" << std::endl;
}
3.2 绑定问题
跟上一章一样要绑定,但是不能显示绑定。
3.3 发起链接connect
#include <sys/types.h> /* See NOTES */
#include <sys/socket.h>
int connect(int sockfd, const struct sockaddr *addr,
socklen_t addrlen);
RETURN VALUE
If the connection or binding succeeds, zero is returned.
On error, -1 is returned, and errno is set appropriately.
参数说明:
这里的
addr和addrlen填入的是服务端信息。
在UDP通信中,客户端在sendto的时候会自动绑定IP和port,TCP这里就是在connect的时候绑定。
void start()
{
struct sockaddr_in si;
bzero(&si, sizeof si);
si.sin_family = AF_INET;
si.sin_port = htons(_serverport);
si.sin_addr.s_addr = inet_addr(_serverip.c_str());
if(connect(_sock, (struct sockaddr*)&si, sizeof si) < 0)
{
std::cout << "connect socket error" << std::endl;
}
else
{
std::string msg;
while(1)
{
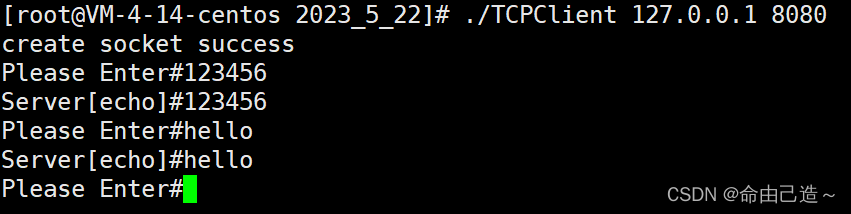
std::cout << "Please Enter#";
std::getline(std::cin, msg);
write(_sock, msg.c_str(), msg.size());
// 从服务端读取数据
char buf[1024];
int n = read(_sock, buf, sizeof buf - 1);
if(n > 0)
{
buf[n] = '�';
std::cout << buf << std::endl;
}
else
{
break;
}
}
}
}
最后在析构的时候要关掉文件描述符。
~TCPClient()
{
if(_sock >= 0)
{
close(_sock);
}
}
服务端:
客户端:
但此时如果我们在用一个客户端链接,会发现无法通信,除非第一个客户端退出。
这是因为获取新链接后会进入ServerIo中死循环。只要这个客户端不退出,就会一直给这个客户端提供服务。
那怎么保证多个客户端并行呢?
3.4 客户端并行
3.4.1 多进程版
因为fork后子进程会复制父进程的文件描述符。
这里注意子进程并不需要_listensock文件描述符,所以最好关闭。
pid_t id = fork();
if(id == 0)// child
{
close(_listensock);
ServerIO(sock);
close(sock);
exit(1);
}
接下来父进程怎么办呢?是等待吗?
如果父进程等待的话又会导致上面的情况,子进程不退出父进程就一直等待。
子进程退出时,会给父进程发送一个SIGCHLD,17号信号。所以有一种解决办法就是用signal函数,在回调函数中把waitpid的参数设置为-1(等待任意进程),就可以回收。
现在我们不用这种办法,我们可以这么写:
pid_t id = fork();
if(id == 0)// child
{
close(_listensock);
if(fork() > 0) exit(1);
ServerIO(sock);
close(sock);
exit(1);
}
// father
pid_t ret = waitpid(id, nullptr, 0);
if(ret > 0)
{
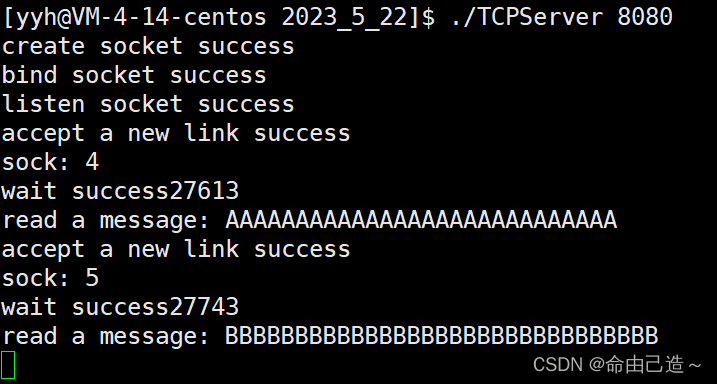
std::cout << "wait success" << ret << std::endl;
}
这里的意思就是创建孙子进程,父进程直接退出,让孙子进程执行ServerIO,此时孙子进程就会被操作系统收养,不用我们管,而父进程退出,外边的父进程也等待成功了。
结果演示:
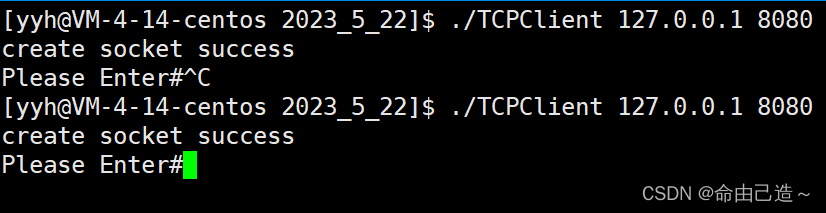
客户端:


服务端:
其实下面的等待可以不用等待,因为SIGCHLD信号默认的处理方式是忽略。
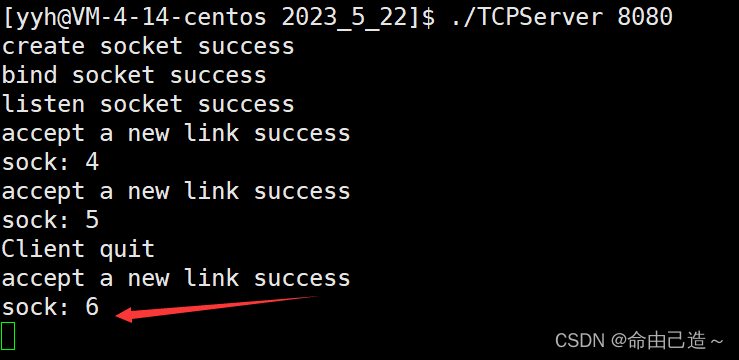
这里看到客户端退出了但是文件描述符并没有被回收。
这里的原因是我们只关闭了子进程的文件描述符,没有关闭父进程:
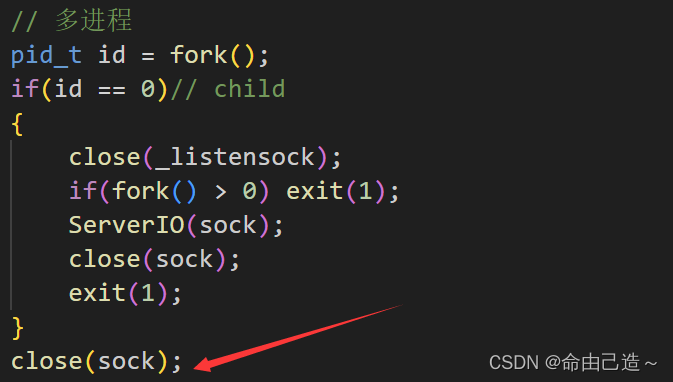
3.4.2 多线程版
struct ThreadData
{
TCPServer* _self;
int _sock;
};
void start()
{
while(1)
{
// 获取新链接
struct sockaddr_in si;
socklen_t len = sizeof si;
int sock = accept(_listensock, (struct sockaddr*)&si, &len);
if(sock < 0)
{
// 获取链接失败无影响,继续获取即可
std::cout << "accept error, continue" << std::endl;
continue;
}
std::cout << "accept a new link success" << std::endl;
std::cout << "sock: " << sock << std::endl;
// 多线程
pthread_t tid;
ThreadData* td = new ThreadData({this, sock});
pthread_create(&tid, nullptr, thread_start, td);
}
}
static void* thread_start(void* args)
{
// 线程分离
pthread_detach(pthread_self());
ThreadData* tp = static_cast<ThreadData*>(args);
tp->_self->ServerIO(tp->_sock);
close(tp->_sock);
delete tp;
}
3.4.3 线程池版
前面我们写过线程池【linux】基于单例模式实现线程池,这里直接拿来用即可。
这里就要修改一下代码,因为ServerIO可以不属于类,所以可以把ServerIO放在任务Task.hpp中。
// Task.hpp
#pragma once
#include <iostream>
#include <string>
#include <functional>
#include <cstdio>
void ServerIO(int sock)
{
char buf[1024];
// 接收消息
while(1)
{
ssize_t n = read(sock, buf, sizeof buf - 1);
if(n > 0)
{
buf[n] = '�';
std::cout << "read a message: " << buf << std::endl;
// 把消息发送回去
std::string outbuf;
outbuf += "Server[echo]#";
outbuf += buf;
write(sock, outbuf.c_str(), outbuf.size());
}
else if(n == 0)
{
// 代表客户端退出
std::cout << "Client quit" << std::endl;
break;
}
}
}
class Task
{
typedef std::function<void(int)> func_t;
public:
Task()
{}
Task(int sock, func_t func)
: _sock(sock)
, _func(func)
{}
void operator()()
{
_func(_sock);
}
std::string tostringTask()
{
char buf[64];
snprintf(buf, sizeof buf, "%d %c %d = ?", _x, _op, _y);
return buf;
}
private:
int _sock;
func_t _func;
};
// ThreadPool.hpp
#pragma once
#include <vector>
#include <queue>
#include <mutex>
#include "mythread.hpp"
#include "mymutex.hpp"
#include "Task.hpp"
using std::cout;
using std::endl;
const int N = 5;
template <class T>
class ThreadPool;
template <class T>
struct ThreadData
{
ThreadPool<T>* _tp;
std::string _name;
ThreadData(ThreadPool<T>* tp, const std::string& name)
: _tp(tp)
, _name(name)
{}
};
template <class T>
class ThreadPool
{
private:
static void* handlerTask(void* args)
{
ThreadData<T>* tdp = static_cast<ThreadData<T>*>(args);
while(true)
{
tdp->_tp->lockqueue();
while(tdp->_tp->isqueueempty())
{
tdp->_tp->threadwait();
}
T t = tdp->_tp->pop();
tdp->_tp->unlockqueue();
t();
}
delete tdp;
}
void lockqueue() volatile
{
pthread_mutex_lock(&_mutex);
}
void unlockqueue() volatile
{
pthread_mutex_unlock(&_mutex);
}
bool isqueueempty() volatile
{
return _tasks.empty();
}
void threadwait() volatile
{
pthread_cond_wait(&_cond, &_mutex);
}
T pop() volatile
{
T res = _tasks.front();
_tasks.pop();
return res;
}
ThreadPool(int num = 5)
: _num(num)
{
pthread_mutex_init(&_mutex, nullptr);
pthread_cond_init(&_cond, nullptr);
// 创建线程
for(int i = 0; i < _num; i++)
{
_threads.push_back(new Thread());
}
}
ThreadPool(const ThreadPool<T>& ) = delete;
ThreadPool<T> operator=(const ThreadPool<T>&) = delete;
public:
void start() volatile
{
for(auto& t : _threads)
{
ThreadData<T>* td = new ThreadData<T>(this, t->GetName());
t->start(handlerTask, td);
}
}
void push(const T& in) volatile
{
LockAuto lock(&_mutex);
_tasks.push(in);
// 唤醒池中的一个线程
pthread_cond_signal(&_cond);
}
~ThreadPool()
{
pthread_mutex_destroy(&_mutex);
pthread_cond_destroy(&_cond);
for(auto & e : _threads)
{
delete e;
}
}
volatile static ThreadPool<T>* GetSingle()
{
if(_tp == nullptr)
{
_singlelock.lock();
if(_tp == nullptr)
{
_tp = new ThreadPool<T>();
}
_singlelock.unlock();
}
return _tp;
}
private:
int _num;// 线程数量
std::vector<Thread*> _threads;
std::queue<T> _tasks;// 任务队列
pthread_mutex_t _mutex;// 保护任务队列
pthread_cond_t _cond;
volatile static ThreadPool<T>* _tp;
static std::mutex _singlelock;
};
template <class T>
volatile ThreadPool<T>* ThreadPool<T>::_tp = nullptr;
template <class T>
std::mutex ThreadPool<T>::_singlelock;
// TCPServer.hpp
#pragma once
#include <iostream>
#include <string>
#include <cstring>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <strings.h>
#include <cstdlib>
#include <sys/wait.h>
#include <pthread.h>
#include "ThreadPool.hpp"
#include "log.hpp"
class TCPServer;
struct ThreadData
{
TCPServer* _self;
int _sock;
};
class TCPServer
{
static const uint16_t gport = 8080;
static const int gbacklog = 10;
public:
TCPServer(const uint16_t& port = gport)
: _listensock(-1)
, _port(port)
{}
void InitServer()
{
_listensock = socket(AF_INET, SOCK_STREAM, 0);
if(_listensock == -1)
{
std::cerr << "create socket error" << std::endl;
exit(1);
}
std::cout << "create socket success" << std::endl;
struct sockaddr_in si;
// 初始化结构体
bzero(&si, sizeof si);
si.sin_family = AF_INET;
si.sin_port = htons(_port);// 主机转网络序列
si.sin_addr.s_addr = INADDR_ANY;
if(bind(_listensock, (struct sockaddr*)&si, sizeof si) < 0)
{
std::cout << "bind socket error" << std::endl;
exit(1);
}
std::cout << "bind socket success" << std::endl;
// 设置监听状态
if(listen(_listensock, gbacklog) < 0)
{
std::cout << "listen socket error" << std::endl;
exit(1);
}
std::cout << "listen socket success" << std::endl;
}
void start()
{
// 线程池初始化
ThreadPool<Task>::GetSingle()->start();
while(1)
{
// 获取新链接
struct sockaddr_in si;
socklen_t len = sizeof si;
int sock = accept(_listensock, (struct sockaddr*)&si, &len);
if(sock < 0)
{
// 获取链接失败无影响,继续获取即可
std::cout << "accept error, continue" << std::endl;
continue;
}
std::cout << "accept a new link success" << std::endl;
std::cout << "sock: " << sock << std::endl;
// 线程池
ThreadPool<Task>::GetSingle()->push(Task(sock, ServerIO));
// 多线程
// pthread_t tid;
// ThreadData* td = new ThreadData({this, sock});
// pthread_create(&tid, nullptr, thread_start, td);
// 多进程
// pid_t id = fork();
// if(id == 0)// child
// {
// close(_listensock);
// if(fork() > 0) exit(1);
// ServerIO(sock);
// close(sock);
// exit(1);
// }
// close(sock);
// father
// pid_t ret = waitpid(id, nullptr, 0);
// if(ret > 0)
// {
// std::cout << "wait success " << ret << std::endl;
// }
// ServerIO(sock);
// // 关闭使用完的文件描述符
// close(sock);
}
}
static void* thread_start(void* args)
{
// 线程分离
pthread_detach(pthread_self());
ThreadData* tp = static_cast<ThreadData*>(args);
tp->_self->ServerIO(tp->_sock);
close(tp->_sock);
delete tp;
}
private:
int _listensock;
uint16_t _port;
};
四、总结
对比UDP服务器,TCP服务器多了获取新链接和监听的操作,而因为TCP是面向字节流的,所以接收和发送数据都是IO操作,也就是文件操作。





站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结