您现在的位置是:首页 >其他 >动手深度学习convolutional-modern网络对比总结网站首页其他
动手深度学习convolutional-modern网络对比总结
目录
LeNet
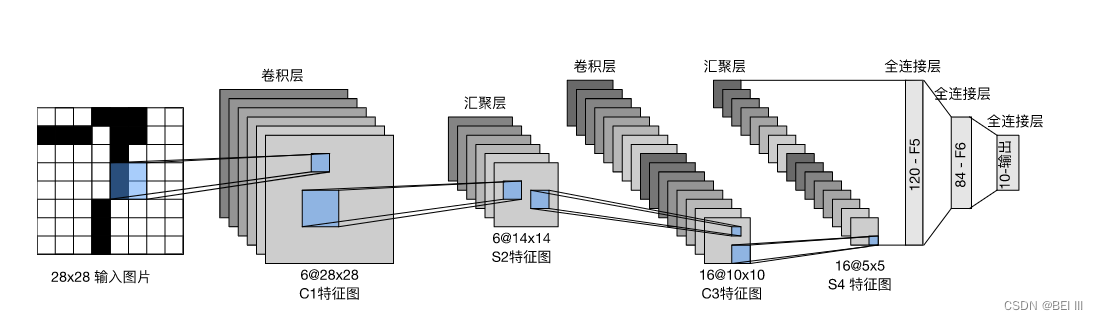
它是最早发布的卷积神经网络之一,目的是识别图像 :cite:LeCun.Bottou.Bengio.ea.1998中的手写数字。LeNet被广泛用于自动取款机(ATM)机中,帮助识别处理支票的数字。
总体来看,(LeNet(LeNet-5)由两个部分组成:
- 卷积编码器:由两个卷积层组成;
- 全连接层密集块:由三个全连接层组成。
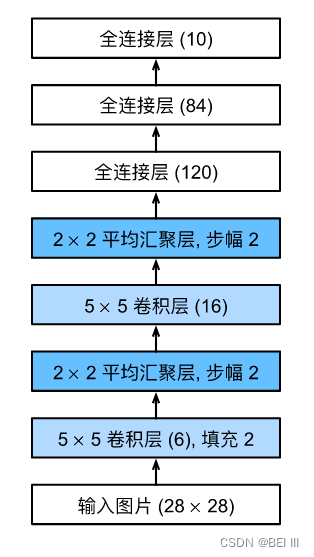
LeNet模型:
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
# 输入通道是1,输出通道是6
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
# 输入通道是6,输出通道变成16
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
# 第一维批量保持住,后面全部拉成一个向量
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
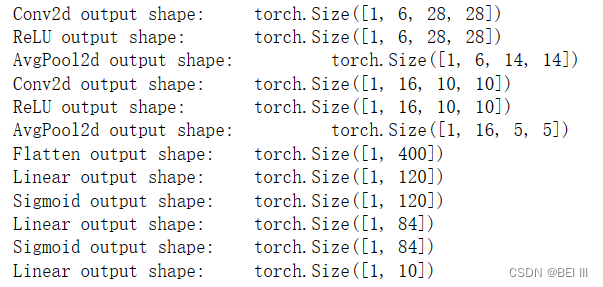
nn.Linear(84, 10))中间输出的shape
AlexNet
在2012年前,图像特征都是机械地计算出来的。事实上,设计一套新的特征函数、改进结果,并撰写论文是盛极一时的潮流。但AlexNet团队认为特征本身应该被学习。此外,他们还认为,在合理地复杂性前提下,特征应该由多个共同学习的神经网络层组成,每个层都有可学习的参数。在机器视觉中,最底层可能检测边缘、颜色和纹理。
AlexNet在2012年ImageNet挑战赛中取得了轰动一时的成绩。它首次证明了学习到的特征可以超越手工设计的特征。它一举打破了计算机视觉研究的现状。
突破的原因:
- 2009年,ImageNet数据集的发布,并发起了ImageNet挑战赛,推动发展
- Alex Krizhevsky和Ilya Sutskever实现了可以在GPU硬件上运行的深度卷积神经网络。他们意识到卷积神经网络中的计算瓶颈:卷积和矩阵乘法,都是可以在硬件上并行化的操作。 于是,他们使用两个显存为3GB的NVIDIA GTX580 GPU实现了快速卷积运算。
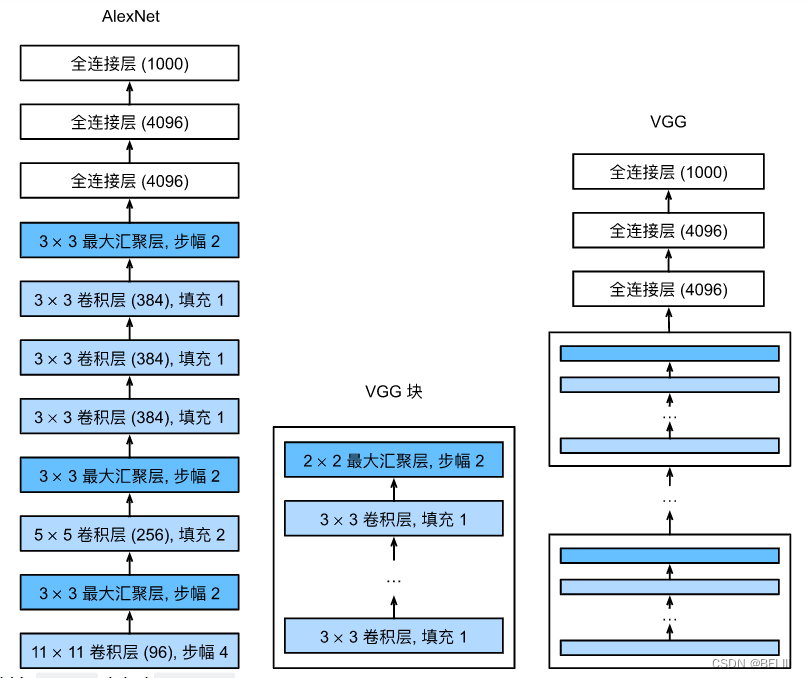
模型对比:
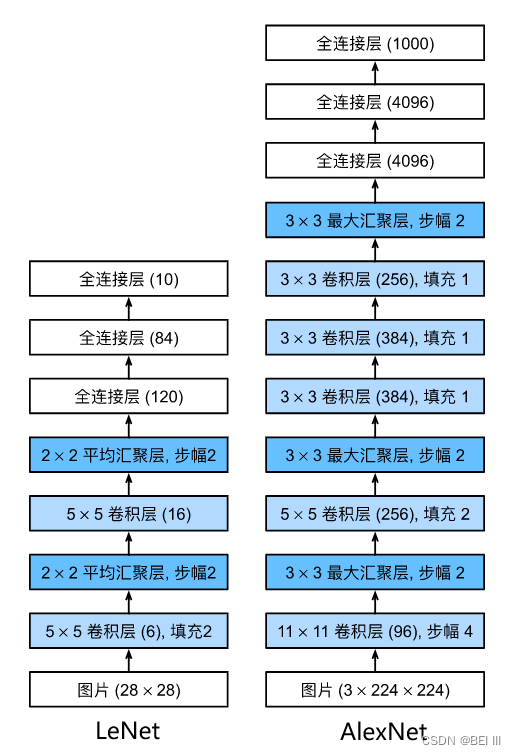
AlexNet使用了8层卷积神经网络,上面的架构是精简版。
AlexNet和LeNet的设计理念非常相似,但也存在显著差异。
- AlexNet比相对较小的LeNet5要深得多。AlexNet由八层组成:五个卷积层、两个全连接隐藏层和一个全连接输出层。
- AlexNet使用ReLU而不是sigmoid作为其激活函数。
net = nn.Sequential(
# 这里使用一个11*11的更大窗口来捕捉对象。
# 同时,步幅为4,以减少输出的高度和宽度。
# 另外,输出通道的数目远大于LeNet
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 使用三个连续的卷积层和较小的卷积窗口。
# 除了最后的卷积层,输出通道的数量进一步增加。
# 在前两个卷积层之后,汇聚层不用于减少输入的高度和宽度
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
# 这里,全连接层的输出数量是LeNet中的好几倍。使用dropout层来减轻过拟合
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# 最后是输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10)) 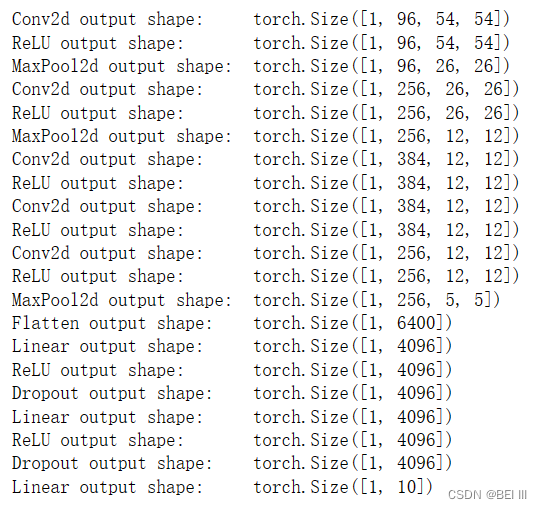
AlexNet通过暂退法( :numref:sec_dropout)控制全连接层的模型复杂度,而LeNet只使用了权重衰减。 为了进一步扩充数据,AlexNet在训练时增加了大量的图像增强数据,如翻转、裁切和变色。 这使得模型更健壮,更大的样本量有效地减少了过拟合。
AlexNet的架构与LeNet相似,但使用了更多的卷积层和更多的参数来拟合大规模的ImageNet数据集。
VGG(使用块的网络)
使用块的想法首先出现在牛津大学的视觉几何组(visual geometry group)的VGG网络中。通过使用循环和子程序,可以很容易地在任何现代深度学习框架的代码中实现这些重复的架构。
VGG块
一个VGG块由一系列卷积层组成,后面再加上用于空间下采样的最大汇聚层。在最初的VGG论文中 :cite:Simonyan.Zisserman.2014,作者使用了带有3×33×3卷积核、填充为1(保持高度和宽度)的卷积层,和带有2×22×2汇聚窗口、步幅为2(每个块后的分辨率减半)的最大汇聚层。在下面的代码中,我们定义了一个名为vgg_block的函数来实现一个VGG块。
该函数有三个参数,分别对应于卷积层的数量num_convs、输入通道的数量in_channels 和输出通道的数量out_channels.
def vgg_block(num_convs, in_channels, out_channels):
layers = []
for _ in range(num_convs):
layers.append(nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels
layers.append(nn.MaxPool2d(kernel_size=2,stride=2))
return nn.Sequential(*layers)VGG网络
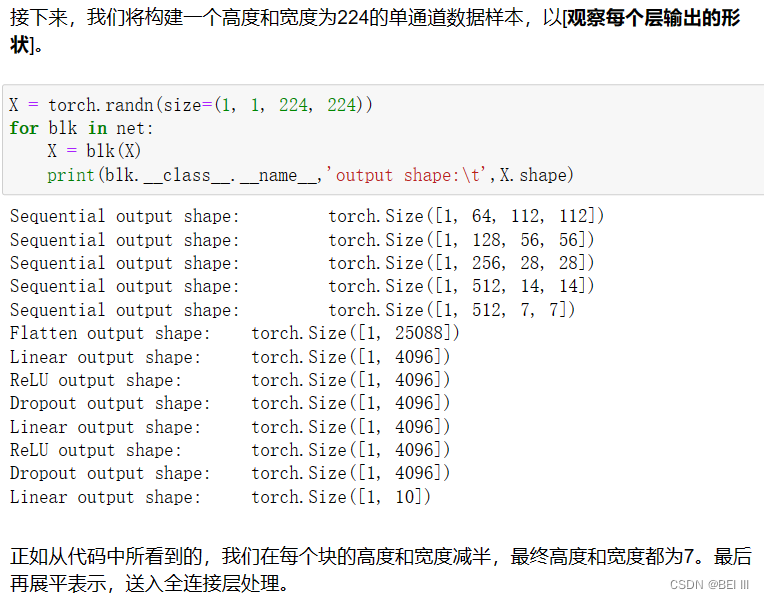
原始VGG网络有5个卷积块,其中前两个块各有一个卷积层,后三个块各包含两个卷积层。 第一个模块有64个输出通道,每个后续模块将输出通道数量翻倍,直到该数字达到512。由于该网络使用8个卷积层和3个全连接层,因此它通常被称为VGG-11。
# 该VGG块有多少个卷积层,输出通道数
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
def vgg(conv_arch):
conv_blks = []
in_channels = 1
# 卷积层部分
for (num_convs, out_channels) in conv_arch:
conv_blks.append(vgg_block(num_convs, in_channels, out_channels))
in_channels = out_channels
return nn.Sequential(
*conv_blks, nn.Flatten(),
# 全连接层部分
nn.Linear(out_channels * 7 * 7, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 10))
net = vgg(conv_arch)观察每层输出形状
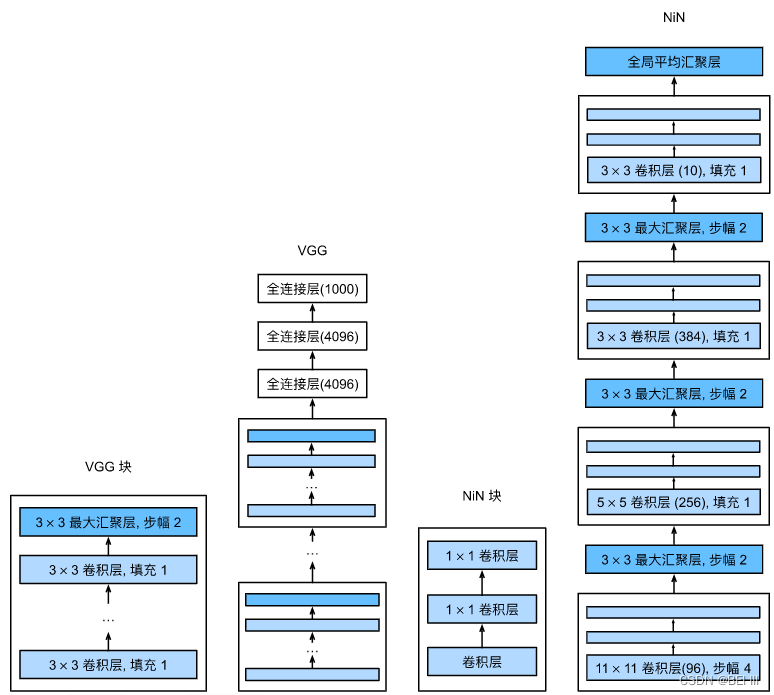
NiN(网络中的网络)
LeNet、AlexNet和VGG都有一个共同的设计模式:通过一系列的卷积层与汇聚层来提取空间结构特征;然后通过全连接层对特征的表征进行处理。 AlexNet和VGG对LeNet的改进主要在于如何扩大和加深这两个模块。 或者,可以想象在这个过程的早期使用全连接层。然而,如果使用了全连接层,可能会完全放弃表征的空间结构。 网络中的网络(NiN)提供了一个非常简单的解决方案:在每个像素的通道上分别使用多层感知机
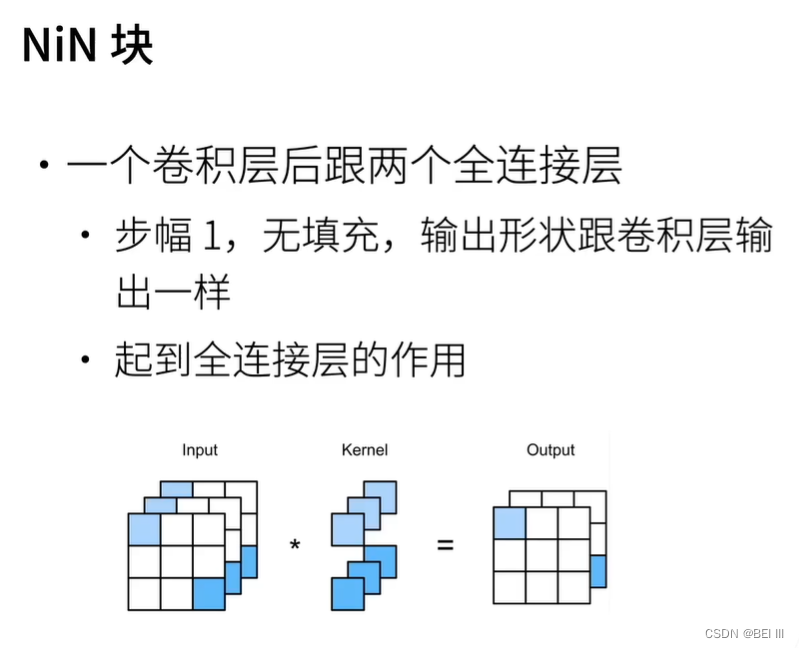
NiN块
NiN的想法是在每个像素位置(针对每个高度和宽度)应用一个全连接层。 如果我们将权重连接到每个空间位置,我们可以将其视为1×1卷积层(如 :numref:sec_channels中所述),或作为在每个像素位置上独立作用的全连接层。 从另一个角度看,即将空间维度中的每个像素视为单个样本,将通道维度视为不同特征(feature)。
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU())1*1卷积层
NiN模型
NiN和AlexNet之间的一个显著区别是NiN完全取消了全连接层。 相反,NiN使用一个NiN块,其输出通道数等于标签类别的数量。最后放一个全局平均汇聚层(global average pooling layer),生成一个对数几率 (logits)。
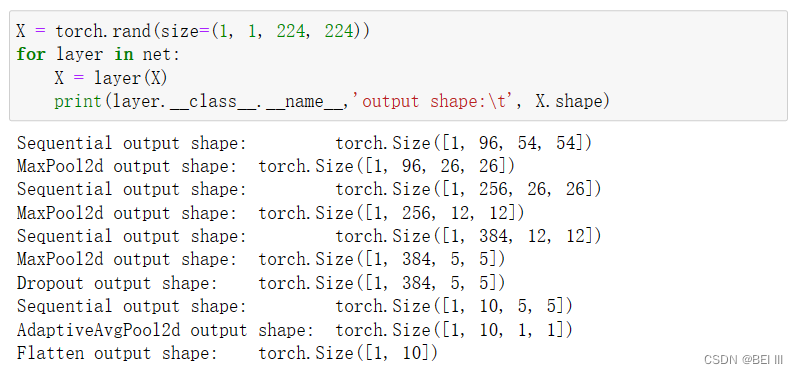
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2d(3, stride=2),
nin_block(96, 256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2d(3, stride=2),
nin_block(256, 384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2d(3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, strides=1, padding=1),
nn.AdaptiveAvgPool2d((1, 1)),
# 将四维的输出转成二维的输出,其形状为(批量大小,10)
nn.Flatten())每个块的输出形状,最后的全局averagepool层,通道数为所需输出的数量
GoogLeNet(含并行连结的网络)
GoogLeNet吸收了NiN中串联网络的思想,并在此基础上做了改进。
Inception块
在GoogLeNet中,基本的卷积块被称为Inception块(Inception block)。
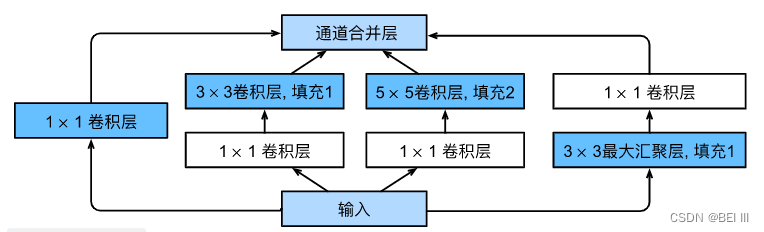
Inception块由四条并行路径组成。 前三条路径使用窗口大小为1×1、3×3和5×5的卷积层,从不同空间大小中提取信息。 中间的两条路径在输入上执行1×1卷积,以减少通道数,从而降低模型的复杂性。 第四条路径使用3×3最大汇聚层,然后使用1×1卷积层来改变通道数。 这四条路径都使用合适的填充来使输入与输出的高和宽一致,最后我们将每条线路的输出在通道维度上连结,并构成Inception块的输出。在Inception块中,通常调整的超参数是每层输出通道数。
class Inception(nn.Module):
# c1--c4是每条路径的输出通道数
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1x1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1x1卷积层后接3x3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1x1卷积层后接5x5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3x3最大汇聚层后接1x1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)GoogLeNet模型
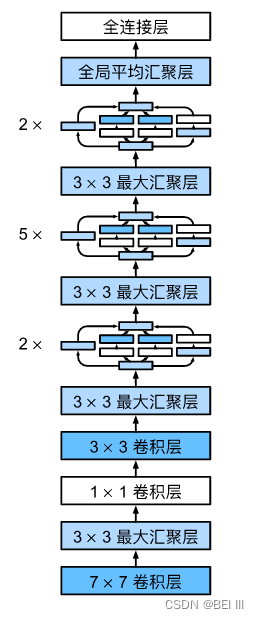
GoogLeNet一共使用9个Inception块和全局平均汇聚层的堆叠来生成其估计值。Inception块之间的最大汇聚层可降低维度。 第一个模块类似于AlexNet和LeNet,Inception块的组合从VGG继承,全局平均汇聚层避免了在最后使用全连接层。
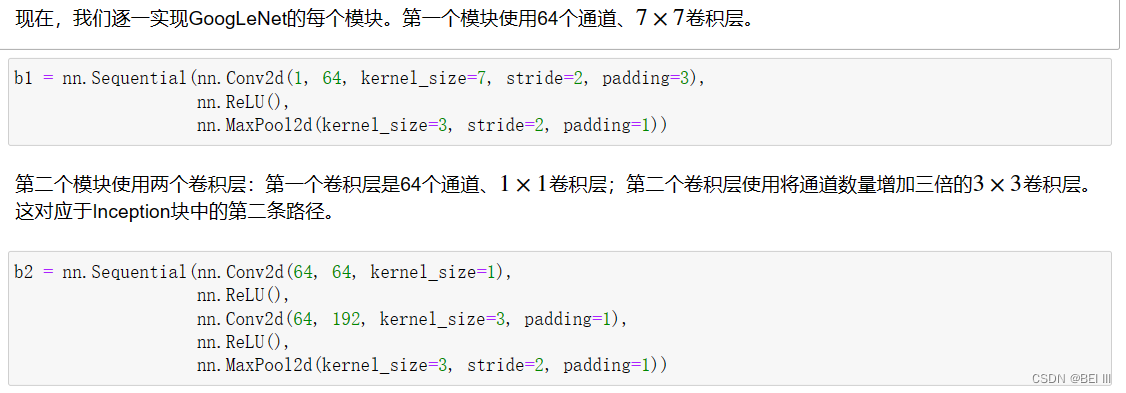
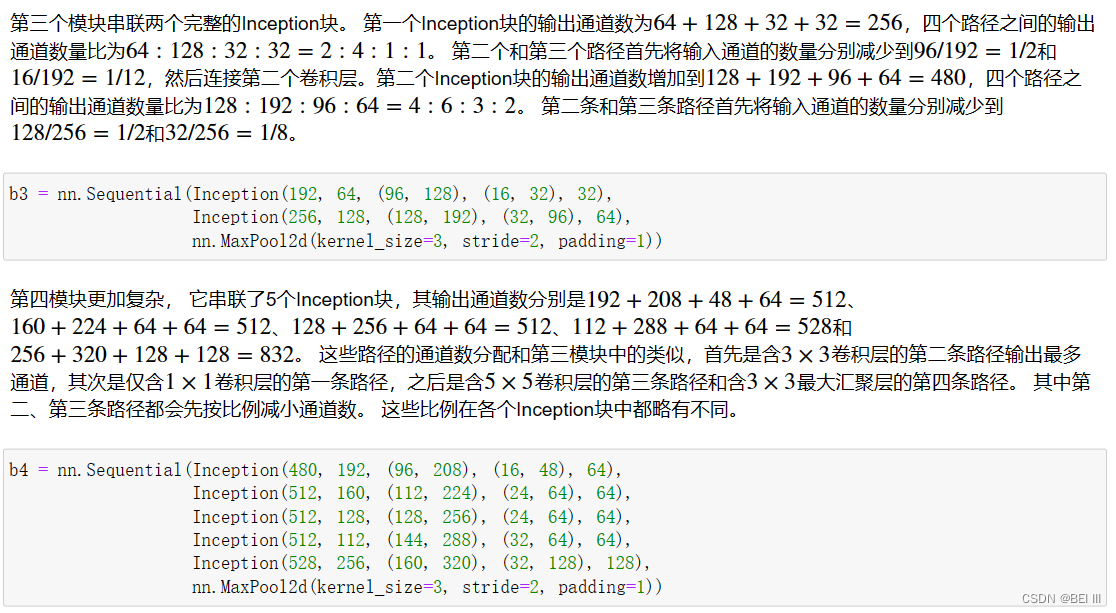
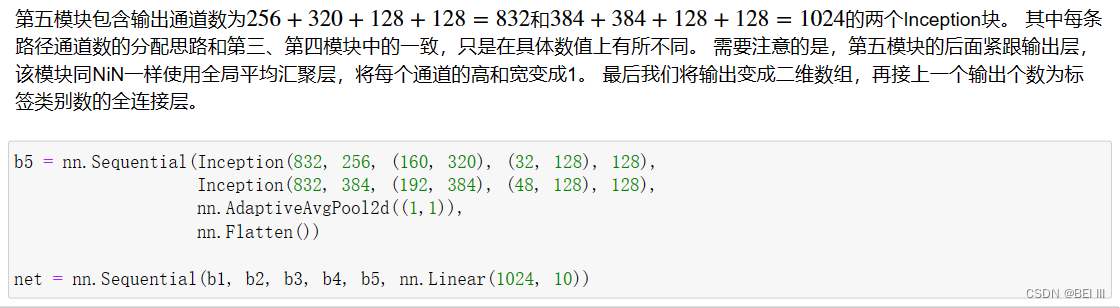
实现GoogLeNet每个模块的代码:
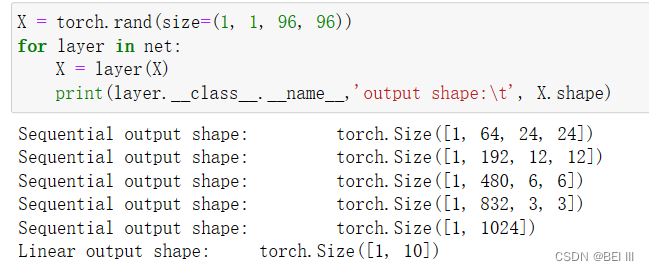
输出的形状






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结