您现在的位置是:首页 >其他 >【Python】基于ML307A的位置读取系统(通过UART串口实现AT指令和flask来实现自动化读取并推流)网站首页其他
【Python】基于ML307A的位置读取系统(通过UART串口实现AT指令和flask来实现自动化读取并推流)
【Python】基于ML307A的位置读取系统(通过UART串口实现AT指令和flask来实现自动化读取并推流)
Python下的串口serial库
串行口的属性:
name:设备名字
portstr:已废弃,用name代替
port:读或者写端口
baudrate:波特率
bytesize:字节大小
parity:校验位
stopbits:停止位
timeout:读超时设置
writeTimeout:写超时
xonxoff:软件流控
rtscts:硬件流控
dsrdtr:硬件流控
interCharTimeout:字符间隔超时
属性的使用方法:
ser=serial.Serial(“/dev/ttyAMA0”,9600,timeout=0.5)
ser.open()
print ser.name
print ser.port
print ser.baudrate#波特率
print ser.bytesize#字节大小
print ser.parity#校验位N-无校验,E-偶校验,O-奇校验
print ser.stopbits#停止位
print ser.timeout#读超时设置
print ser.writeTimeout#写超时
print ser.xonxoff#软件流控
print ser.rtscts#硬件流控
print ser.dsrdtr#硬件流控
print ser.interCharTimeout#字符间隔超时
ser.close()
串口接收要用到多线程库(类似单片机中的中断):
def thread_com_receive():
global ML307A_RX
while True:
try:
rx_buf = ''
rx_buf = COMM.read() # 转化为整型数字
if rx_buf != b'':
time.sleep(0.01)
rx_buf = rx_buf + COMM.read_all()
print("串口收到消息:", rx_buf)
ML307A_RX=str(rx_buf).split("\r\n")[1]
print(ML307A_RX)
time.sleep(0.01)
except:
pass
pass
初始化串口:
# 打开串口
def serial_open(n=0):
global COMM
serial_port = set_com_port(n)
COMM = serial.Serial(serial_port, 115200, timeout=0.01)
if COMM.isOpen():
print(serial_port, "open success")
return 0
else:
print("open failed")
return 255
def init_com():
global ML307A_RX
get_com_list()
len = port_list.__len__()
device = port_list[0].device
print(len, device)
serial_open()
thread1 = threading.Thread(target=thread_com_receive)
thread1.start()
COMM.write("AT
".encode("UTF-8"))
time.sleep(0.1)
if ML307A_RX=="OK":
com_jugg()
AT的命令格式
AT指令格式:AT指令都以”AT”开头,以0x0D 0x0A(即
,换行回车符)结束,模块运行后,串口默认的设置为:8位数据位、1位停止位、无奇偶校验位、硬件流控制(CTS/RTS).
注意为了发送AT命令,最后还要加上0x0D 0x0A(即
,换行回车符)这是串口终端要求.
有一些命令后面可以加额外信息来.如电话号码
每个AT命令执行后,通常DCE都给状态值,用于判断命令执行的结果.
AT返回状态包括三种情况 OK,ERROR,和命令相关的错误原因字符串.返回状态前后都有一个字符.
如 OK 表示AT命令执行成功.
ERROR 表示AT命令执行失败
NO DIAL TONE 只出现在ATD命令返回状态中,表示没有拨号音,这类返回状态要查命令手册
还有一些命令本身是要向DCE查询数据,数据返回时,一般是+打头命令.返回格式
+命令:命令结果
如:AT+CMGR=8 (获取第8条信息)
返回 +CMGR: “REC UNREAD”,“+8613508485560”,“01/07/16,15:37:28+32”,Once more
AT指令串口通信代码如下:
# -*- coding: utf-8 -*-
import serial
import serial.tools.list_ports
import time
import threading
com_rx_buf = '' # 接收缓冲区
com_tx_buf = '' # 发送缓冲区
COMM = serial.Serial() # 定义串口对象
port_list: list # 可用串口列表
port_select: list # 选择好的串口
ML307A_RX=''
# 无串口返回0,
# 返回可用的串口列表
def get_com_list():
global port_list
# a = serial.tools.list_ports.comports()
# print(a)
# port_list = list(serial.tools.list_ports.comports())
port_list = serial.tools.list_ports.comports()
return port_list
def set_com_port(n=0):
global port_list
global port_select
port_select = port_list[n]
return port_select.device
# 打开串口
def serial_open(n=0):
global COMM
serial_port = set_com_port(n)
COMM = serial.Serial(serial_port, 115200, timeout=0.01)
if COMM.isOpen():
print(serial_port, "open success")
return 0
else:
print("open failed")
return 255
# 关闭串口
def serial_close():
global COMM
COMM.close()
print(COMM.name + "closed.")
def set_com_rx_buf(buf=''):
global com_rx_buf
com_rx_buf = buf
def set_com_tx_buf(buf=''):
global com_tx_buf
com_tx_buf = buf
def get_com_rx_buf():
global com_rx_buf
return com_rx_buf
def get_com_tx_buf():
global com_tx_buf
return com_tx_buf
def thread_com_receive():
global ML307A_RX
while True:
try:
rx_buf = ''
rx_buf = COMM.read() # 转化为整型数字
if rx_buf != b'':
time.sleep(0.01)
rx_buf = rx_buf + COMM.read_all()
print("串口收到消息:", rx_buf)
ML307A_RX=str(rx_buf).split("\r\n")[1]
print(ML307A_RX)
time.sleep(0.01)
except:
pass
pass
# def serial_encode(addr=0, command=0, param1=0, param0=0):
# buf = [addr, command, param1, param0, 0, 0, 0, 0]
# print(buf)
# return buf
def serial_send_command(addr=0, command=0, param1=0, param0=0, data3=0, data2=0, data1=0, data0=0):
buf = [addr, command, param1, param0, data3, data2, data1, data0]
COMM.write(buf)
pass
def serial_init():
buf = "AT+CG
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 254 # 进入调试模式失败
buf = "AT+CAN_MODE=0
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 进入正常模式失败,模块处于1状态,即环回模式中
buf = "AT+CAN_BAUD=500000
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 波特率设置失败
buf = "AT+FRAMEFORMAT=1,0,
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 波特率设置失败
buf = "AT+ET
" # 进入透传模式
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 255 # 不是CAN模块
def com_jugg():
global ML307A_RX
while True:
COMM.write("""AT+MUESTATS="radio"
""".encode("UTF-8"))
time.sleep(5)
print(ML307A_RX)
def init_com():
global ML307A_RX
get_com_list()
len = port_list.__len__()
device = port_list[0].device
print(len, device)
serial_open()
thread1 = threading.Thread(target=thread_com_receive)
thread1.start()
COMM.write("AT
".encode("UTF-8"))
time.sleep(0.1)
if ML307A_RX=="OK":
com_jugg()
if __name__ == '__main__':
init_com()
ML307A的部分AT指令说明
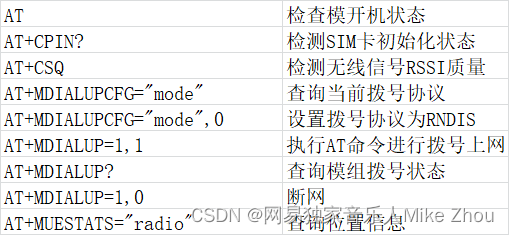
发送AT+MUESTATS=“radio”
即可查询位置信息
# -*- coding: utf-8 -*-
"""
Created on Mon Apr 10 18:21:52 2023
@author: ZHOU
"""
import time
from flask import Flask, render_template, request
import threading
import socket
import serial
import serial.tools.list_ports
local_post = 1212
local_ip = None
for i in range(12):
try:
s = socket.socket(socket.AF_INET,socket.SOCK_DGRAM)
s.connect(("8.8.8.8",80))
local_ip = str(s.getsockname()[0])
s.close()
print("Network Enable")
network_flag = 1
break
except:
print("Network Error...")
network_flag = 0
time.sleep(5)
app = Flask(__name__)
com_rx_buf = '' # 接收缓冲区
com_tx_buf = '' # 发送缓冲区
COMM = serial.Serial() # 定义串口对象
port_list: list # 可用串口列表
port_select: list # 选择好的串口
ML307A_RX=''
location_info = '请输入用户名和密码并成功登陆后,刷新网页查看定位信息'
location_info_flag=0
# 无串口返回0,
# 返回可用的串口列表
def get_com_list():
global port_list
# a = serial.tools.list_ports.comports()
# print(a)
# port_list = list(serial.tools.list_ports.comports())
port_list = serial.tools.list_ports.comports()
return port_list
def set_com_port(n=0):
global port_list
global port_select
port_select = port_list[n]
return port_select.device
# 打开串口
def serial_open(n=0):
global COMM
serial_port = set_com_port(n)
COMM = serial.Serial(serial_port, 115200, timeout=0.01)
if COMM.isOpen():
print(serial_port, "open success")
return 0
else:
print("open failed")
return 255
# 关闭串口
def serial_close():
global COMM
COMM.close()
print(COMM.name + "closed.")
def set_com_rx_buf(buf=''):
global com_rx_buf
com_rx_buf = buf
def set_com_tx_buf(buf=''):
global com_tx_buf
com_tx_buf = buf
def get_com_rx_buf():
global com_rx_buf
return com_rx_buf
def get_com_tx_buf():
global com_tx_buf
return com_tx_buf
def thread_com_receive():
global ML307A_RX
while True:
try:
rx_buf = ''
rx_buf = COMM.read() # 转化为整型数字
if rx_buf != b'':
time.sleep(0.01)
rx_buf = rx_buf + COMM.read_all()
print("串口收到消息:", rx_buf)
ML307A_RX=str(rx_buf).split("\r\n")[1]
time.sleep(0.01)
except:
pass
pass
# def serial_encode(addr=0, command=0, param1=0, param0=0):
# buf = [addr, command, param1, param0, 0, 0, 0, 0]
# print(buf)
# return buf
def serial_send_command(addr=0, command=0, param1=0, param0=0, data3=0, data2=0, data1=0, data0=0):
buf = [addr, command, param1, param0, data3, data2, data1, data0]
COMM.write(buf)
pass
def serial_init():
buf = "AT+CG
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 254 # 进入调试模式失败
buf = "AT+CAN_MODE=0
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 进入正常模式失败,模块处于1状态,即环回模式中
buf = "AT+CAN_BAUD=500000
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 波特率设置失败
buf = "AT+FRAMEFORMAT=1,0,
"
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 253 # 波特率设置失败
buf = "AT+ET
" # 进入透传模式
COMM.write(buf)
time.sleep(0.05)
buf = COMM.read_all()
if buf != "OK
":
return 255 # 不是CAN模块
def com_jugg():
global ML307A_RX
global location_info
global location_info_flag
while True:
COMM.write("""AT+MUESTATS="radio"
""".encode("UTF-8"))
time.sleep(0.5)
if location_info_flag == 1:
location_info = ML307A_RX.split("""+MUESTATS: "radio",""")[1]
print(location_info)
time.sleep(2.5)
print(1)
def init_com():
global ML307A_RX
get_com_list()
len = port_list.__len__()
device = port_list[0].device
print(len, device)
serial_open(0)
thread1 = threading.Thread(target=thread_com_receive)
thread1.setDaemon(True)
thread1.start()
COMM.write("AT
".encode("UTF-8"))
time.sleep(0.1)
print(321)
if ML307A_RX=="OK":
print(111)
com_jugg()
#@app.route('/login/') # 登录
#def login():
# return render_template('login.html')
@app.route('/', methods=['GET', 'POST'])
def index():
global location_info_flag
global location_info
command_str=''
if request.method == 'POST':
c0 = str(request.form.get('send'))
c1 = str(request.form.get('user'))
c2 = str(request.form.get('pass'))
for i in [c0,c1,c2]:
if i != "None":
command_str = i
break
if command_str == "登陆":
if str(request.form.get('user'))=="admin" and str(request.form.get('pass'))=="123":
location_info_flag=1
print("登陆成功")
else:
print("登陆失败")
now_today = time.time()
time_hour = time.localtime(now_today).tm_hour
time_min = time.localtime(now_today).tm_min
time_sec = time.localtime(now_today).tm_sec
if time_hour < 10:
time_hour = "0"+str(time_hour)
if time_min < 10:
time_min = "0"+str(time_min)
local_time_str = str(time.localtime(now_today).tm_year)+"-"+str(time.localtime(now_today).tm_mon)+"-"+str(time.localtime(now_today).tm_mday)+" "+str(time_hour)+":"+str(time_min)+":"+str(time_sec)
data = {
'当前时间:': [local_time_str],
'位置信息:': [location_info],
}
return render_template('index.html',data_dict=data)
def app_run():
app.run(host=local_ip, port=local_post)
if __name__ == "__main__":
thread0 = threading.Thread(target=app_run)
thread0.setDaemon(True)
thread0.start()
print(123)
init_com()







站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结