您现在的位置是:首页 >技术交流 >四轴飞控DIY Mark4 - 优化后续二网站首页技术交流
四轴飞控DIY Mark4 - 优化后续二
简介四轴飞控DIY Mark4 - 优化后续二
四轴飞控DIY Mark4 - 优化后续二
1. 源由
机尾打印支架位置干扰(机尾干扰比机头严重)
随着油门45%左右开始,gyro raw data出现很多噪声。怀疑飞控设计存在问题。
【纹波】增加一些滤波电容,过滤~ 100Hz左右或者其他频率的干扰
2. 优化方案
- 增加摄像头到飞控引线屏蔽 ==> 视频横纹
- 增加飞控到图传引线屏蔽 ==> 视频横纹
- 增加GPS引线屏蔽 ==> GPS搜星
- 更换飞控H743 Dual IMU(270) ==> 电机控制波形
3. 实现细节
3.1 锡箔屏蔽
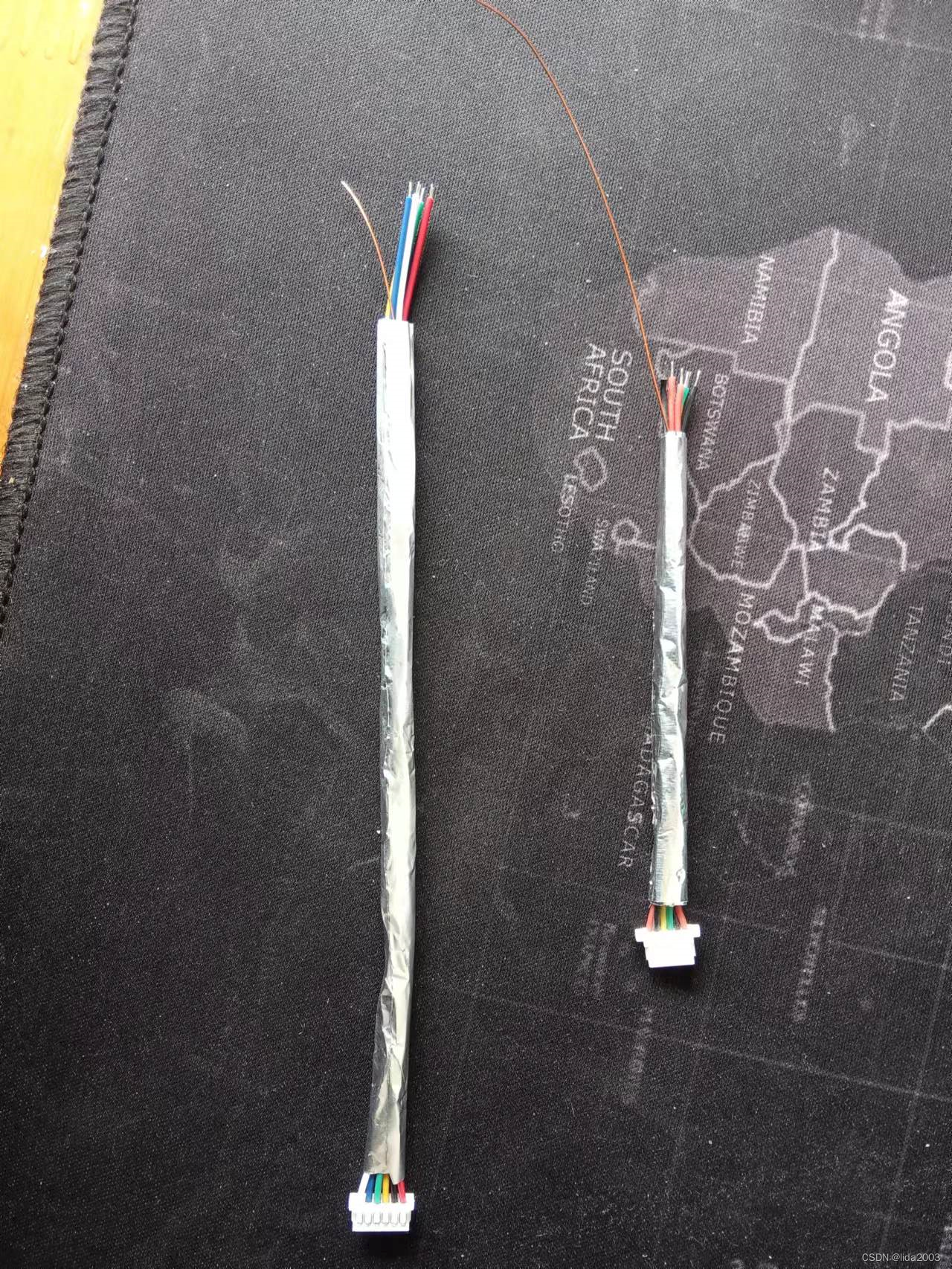
3.2 热缩管固定
- 摄像头 至 飞控 (视频线)
- 飞控 至 图传 (视频线)
- GPS模块 (信号线)

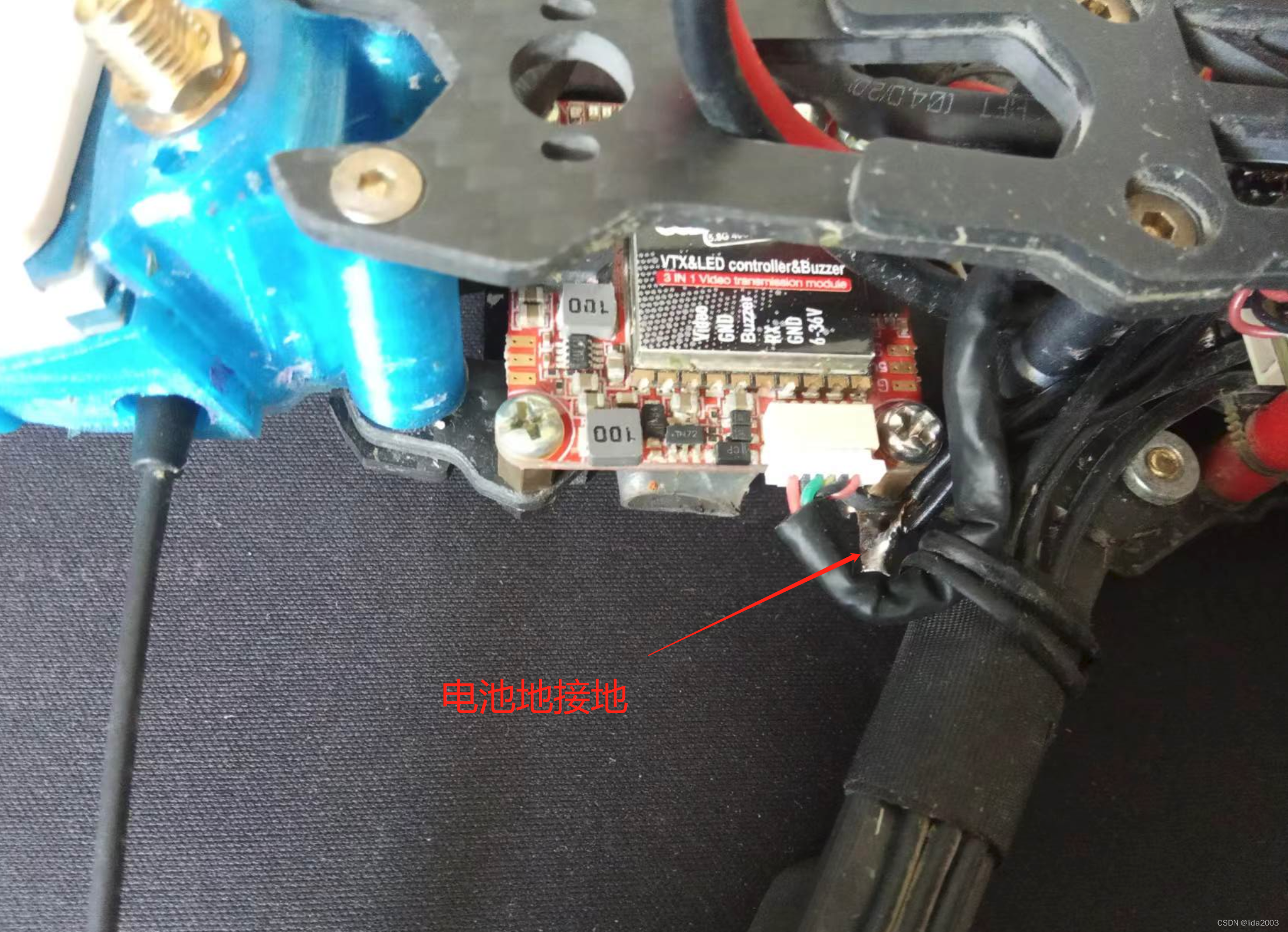
3.3 电池地接地
3.4 更换飞控
更换原Aocoda-RC F405 (6000) 为H743 Dual(270 x 2)

4. 整体效果
- 视频横纹情况未见明显改善,仍然存在横纹,且推油门,干扰会增加;
- GPS搜星明显改善(上电一分钟不到5颗,最多18颗左右;与之前安装机头位置保持一致);
- 电机控制波形明显改善
BetaFlight Mark4 H4Dual飞控&屏蔽优化测试
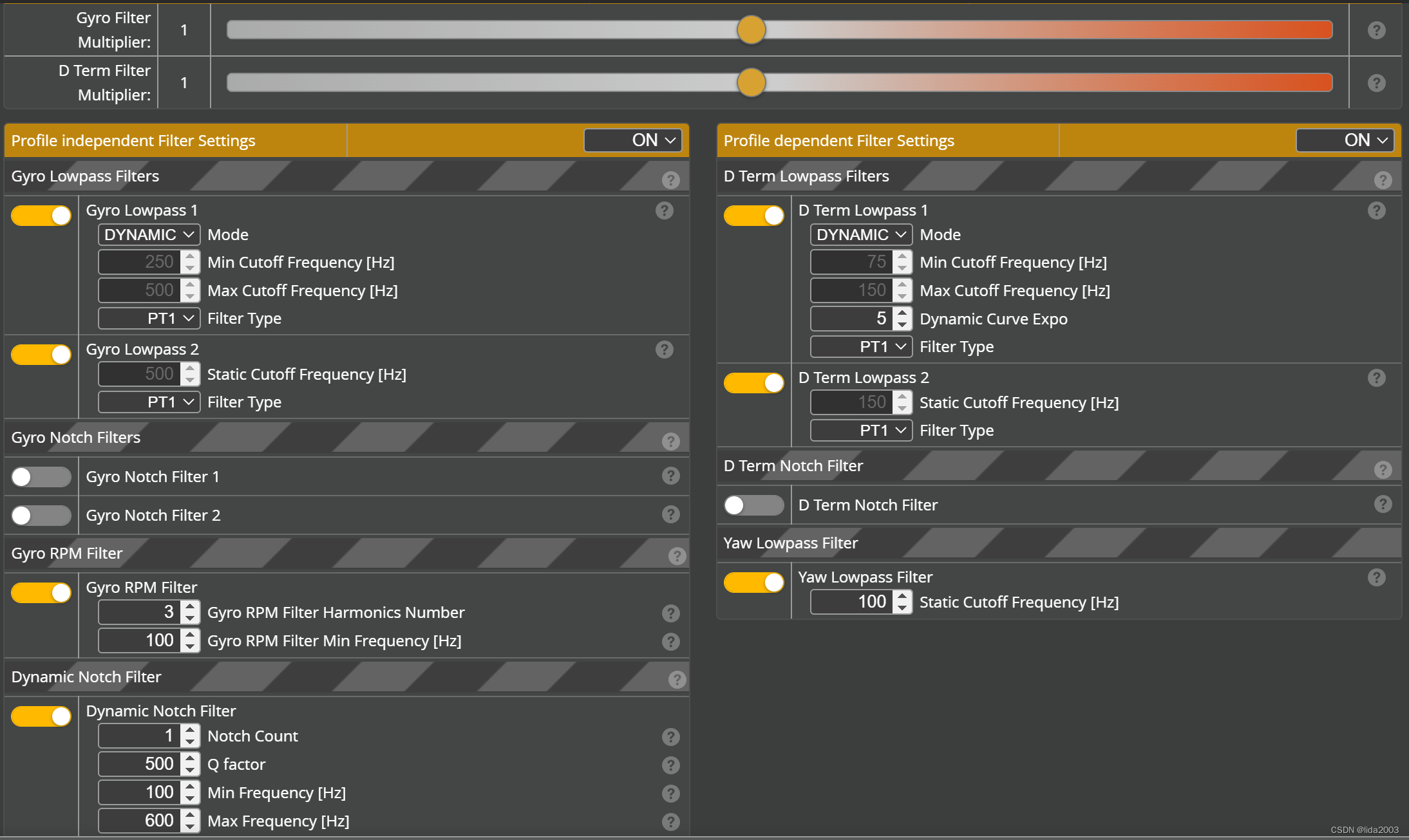
4.1 配置
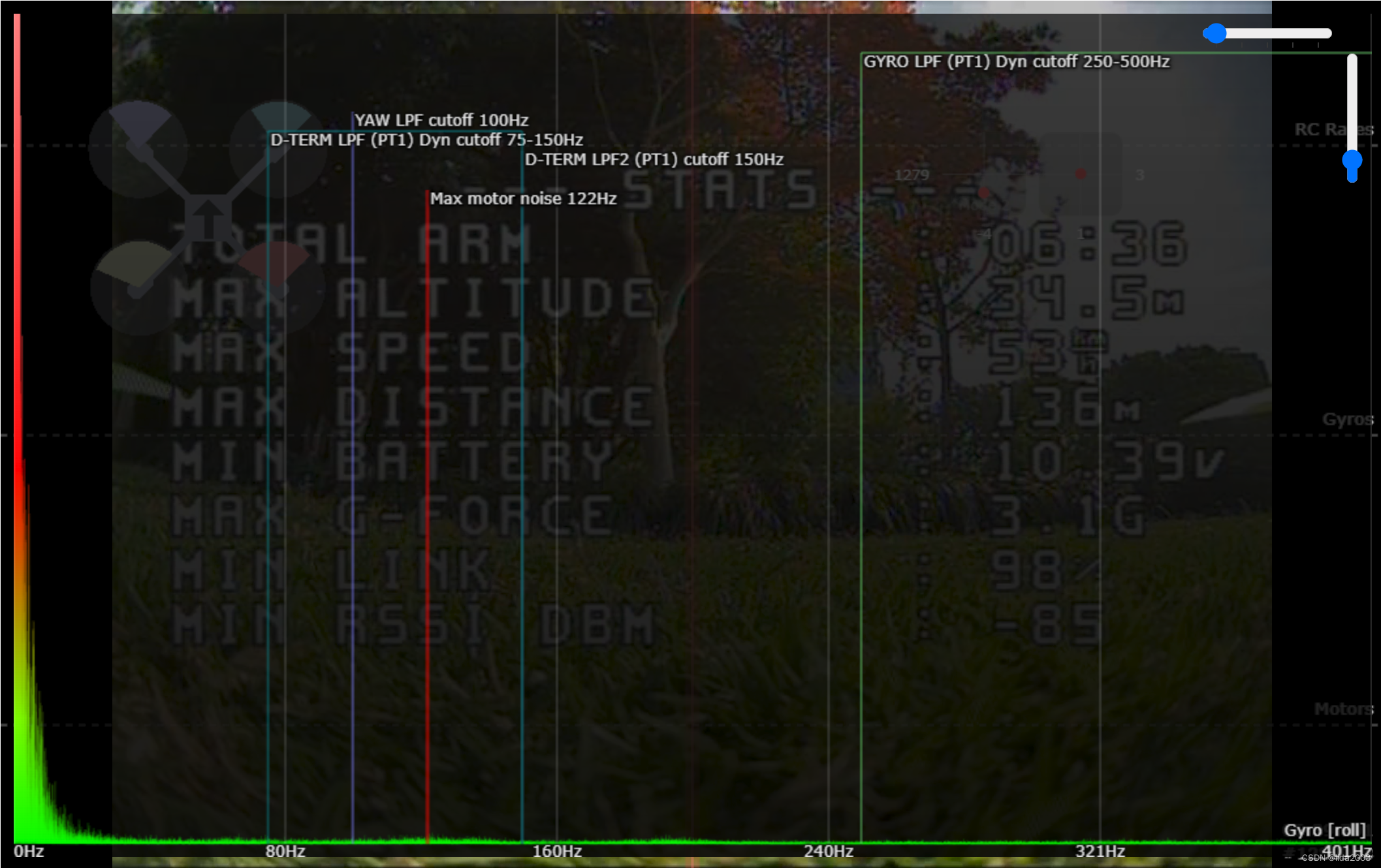
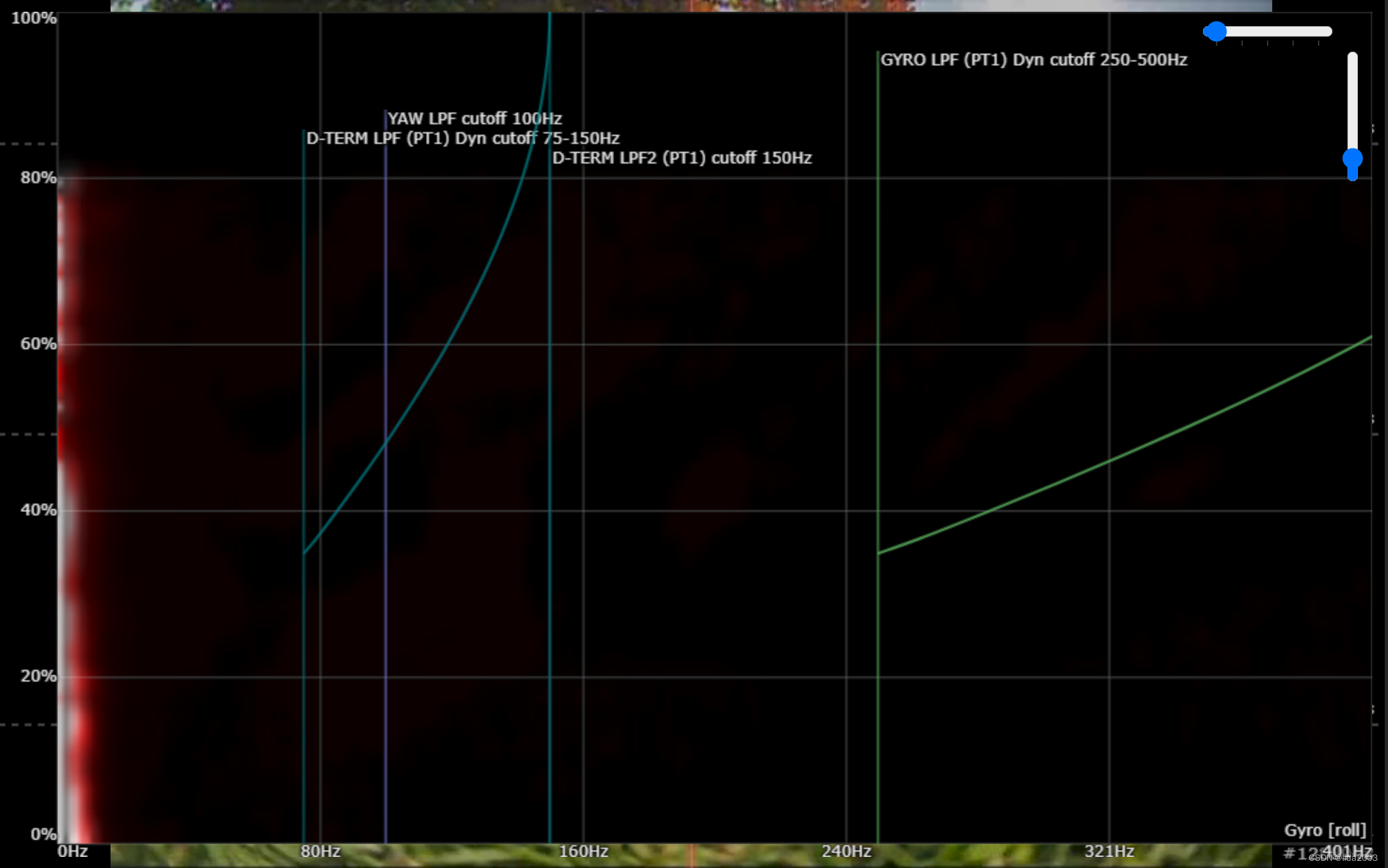
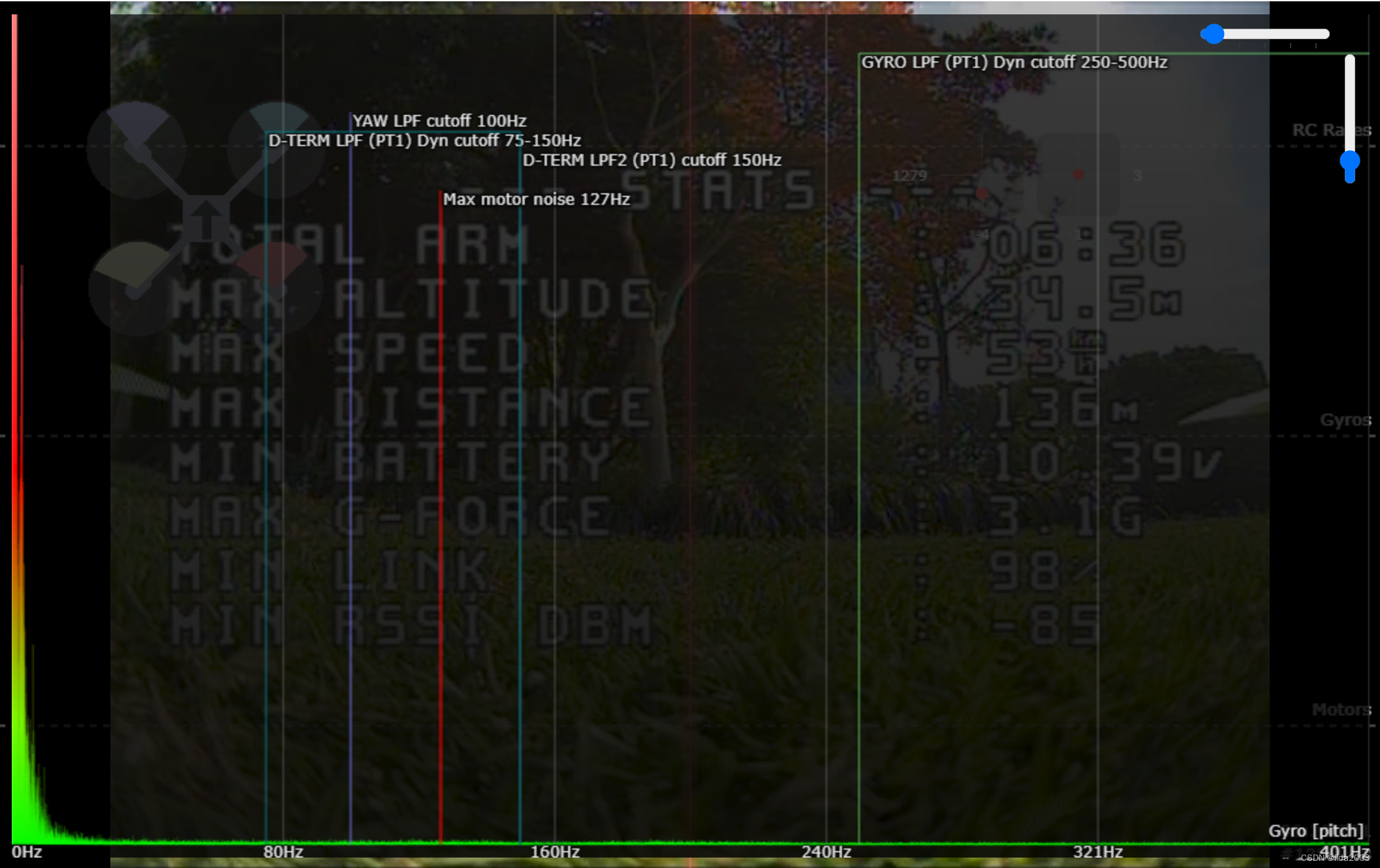
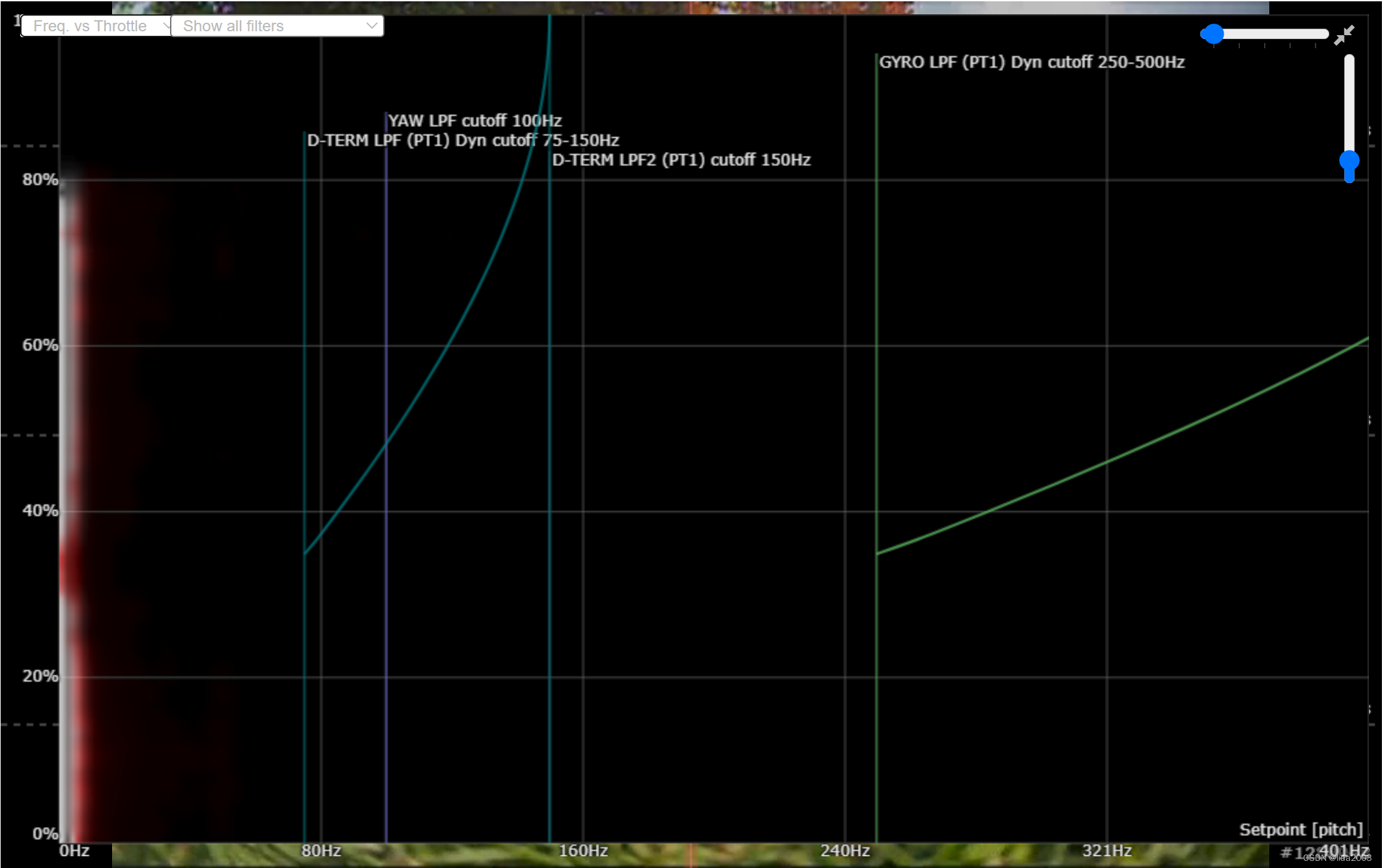
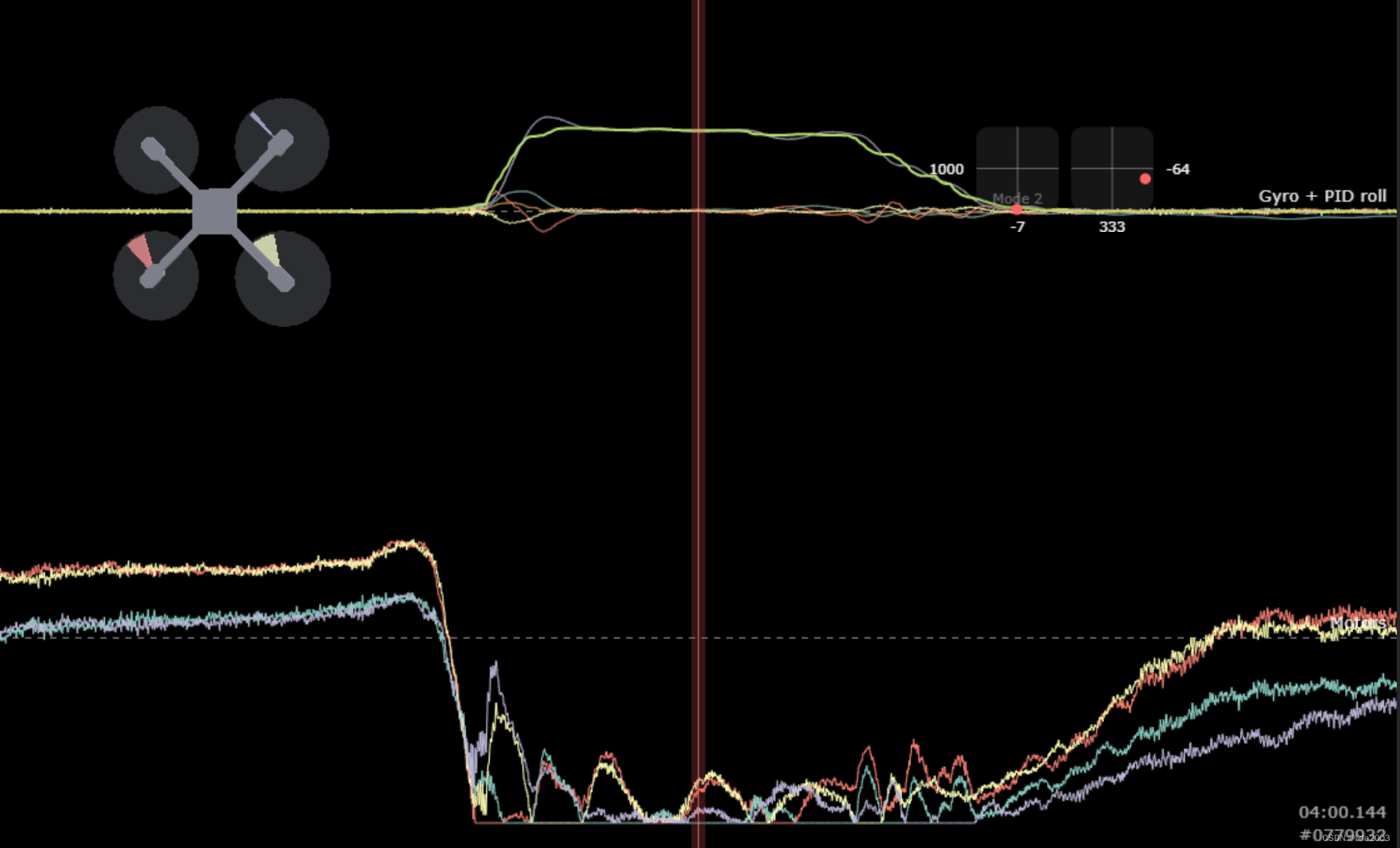
4.2 Roll&Pitch波形
4.3 电机波形
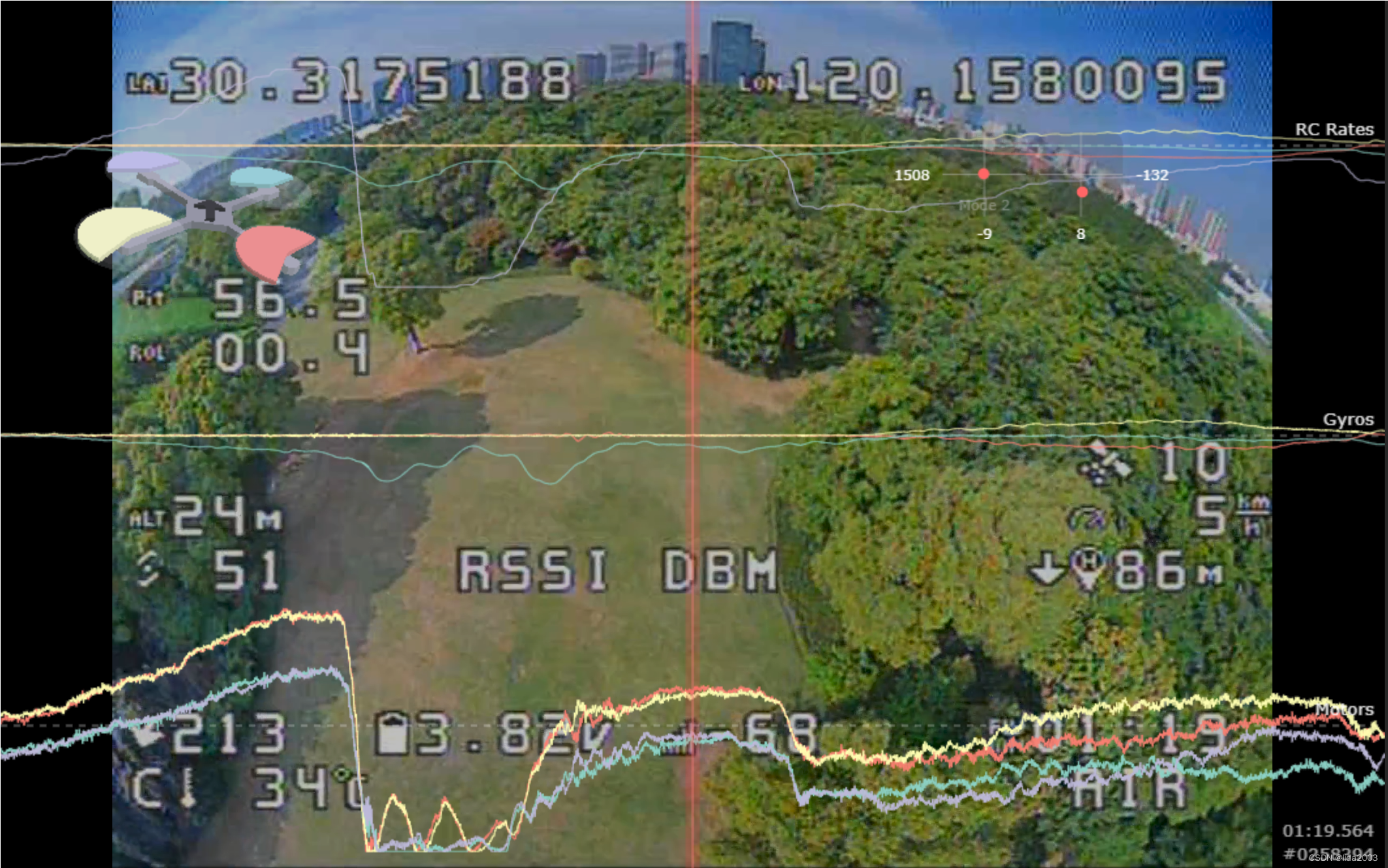
H743的图形,没有F405的电机激烈的变化。不过这里可能没有完全配置好,后续我再测试下,到时候更新一个可对比的图。
对比F450的图谱,感觉很不一样。

对比数据
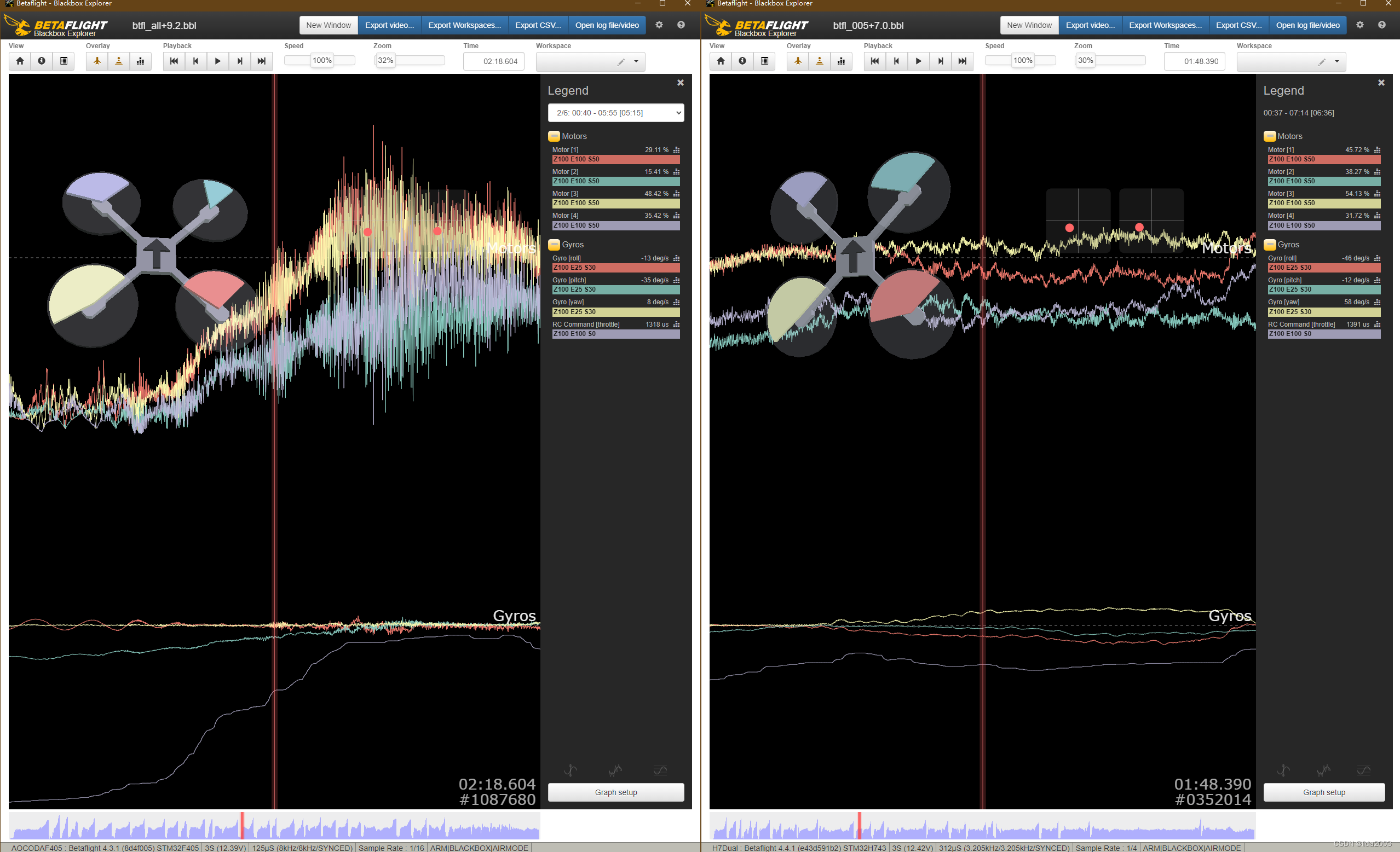
注:桨叶、电机整体性能并非优秀,且操作可能并不完美,因此波形上并不理想,但是相较于 BetaFlight Mark4之“妖怪”声音的波形,已经明显改善。
5. 结论
- GPS引线信号屏蔽,对搜星效果明显;
- 替换STM32 F405(双向DShot600)更换为STM32 H743,CPU占用率从66%下降到12%;
- 怀疑是硬件噪音带来的gyro数据干扰,更换好的飞控硬件,波形立马改善;
- 双 IMU(物理90度摆放)有助于传感器制造工艺带来的偏差纠正;
- 模拟视频纹波现象没有改善,怀疑电源问题;
后续可以考虑使用独立给给摄像头和/或图传供电,以期望找出横纹影响。
6. 附录:FPV Quad GPS cable sheilding
FPV Quad GPS Problems? Struggling to get a lock? Here's the fix!
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结