您现在的位置是:首页 >技术杂谈 >Nvidia技术路线和卷积神经网络介绍网站首页技术杂谈
Nvidia技术路线和卷积神经网络介绍
简介Nvidia技术路线和卷积神经网络介绍
1.Nvidia技术路线概述
2.卷积神经网络介绍
软硬件平台
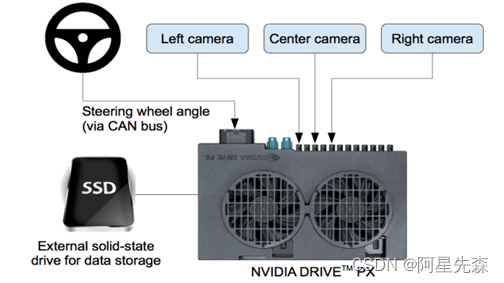
目的:用卷积神经网络(CNNs)将车前部摄像头捕捉到的原始像素图映射为汽车的方向操控命令。 训练:这套端到端学习系统使用了NVIDIA DevBox, 用Torch 7进行训练。 操作:一台 NVIDIA DRIVE PX 自动驾驶汽车计算机用于判断汽车行驶的方向,工作时它每秒需要处理30帧的数据,同样使用Torch 7处理。


训练的输入
输入的训练信号:人工操控方向盘的角度 设备:DAVE-2系统:数据采集车的挡风玻璃后面固定了三台摄像机,在摄像机采集视频数据的同时,此系统也记录驾驶员操控方向盘的偏转角度。 不同于人工将问题拆解,比如拆解成车道线识别、决策规划、车辆控制等子任务,端到端系统同时能优化所有的操纵过程。
训练系统
训练数据包括从视频中采样得到的单帧视频,以及对应的方向控制命令。只用驾驶员操作的数据训练远远不够;网络模型还需要学习如何纠正错误的操作。于是训练数据额外补充了大量图像,包括汽车从车道中心的
风语者!平时喜欢研究各种技术,目前在从事后端开发工作,热爱生活、热爱工作。






站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结