您现在的位置是:首页 >技术交流 >【路径规划】A_star算法机器人动态避障【含Matlab源码 2571期】网站首页技术交流
【路径规划】A_star算法机器人动态避障【含Matlab源码 2571期】
⛄一、A_star算法简介
1 A Star算法及其应用现状
进行搜索任务时提取的有助于简化搜索过程的信息被称为启发信息.启发信息经过文字提炼和公式化后转变为启发函数.启发函数可以表示自起始顶点至目标顶点间的估算距离, 也可以表示自起始顶点至目标顶点间的估算时间等.描述不同的情境、解决不同的问题所采用的启发函数各不相同.我们默认将启发函数命名为H (n) .以启发函数为策略支持的搜索方式我们称之为启发型搜索算法.在救援机器人的路径规划中, A Star算法能结合搜索任务中的环境情况, 缩小搜索范围, 提高搜索效率, 使搜索过程更具方向性、智能性, 所以A Star算法能较好地应用于机器人路径规划相关领域.
2 A Star算法流程
承接2.1节, A Star算法的启发函数是用来估算起始点到目标点的距离, 从而缩小搜索范围, 提高搜索效率.A Star算法的数学公式为:F (n) =G (n) +H (n) , 其中F (n) 是从起始点经由节点n到目标点的估计函数, G (n) 表示从起点移动到方格n的实际移动代价, H (n) 表示从方格n移动到目标点的估算移动代价.
如图2所示, 将要搜寻的区域划分成了正方形的格子, 每个格子的状态分为可通过(walkable) 和不可通过 (unwalkable) .取每个可通过方块的代价值为1, 且可以沿对角移动 (估值不考虑对角移动) .其搜索路径流程如下:
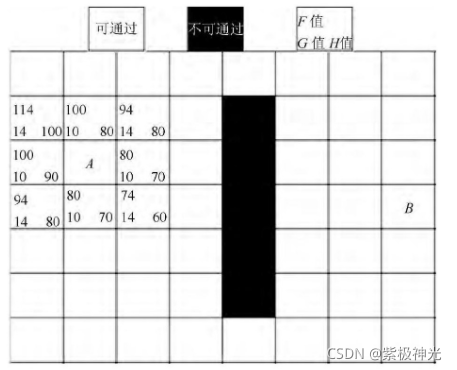
图2 A Star算法路径规划
Step1:定义名为open和c





站长推荐
- QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。
 QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。...
QT多线程的5种用法,通过使用线程解决UI主界面的耗时操作代码,防止界面卡死。... - U8W/U8W-Mini使用与常见问题解决
 U8W/U8W-Mini使用与常见问题解决
U8W/U8W-Mini使用与常见问题解决 - stm32使用HAL库配置串口中断收发数据(保姆级教程)
 stm32使用HAL库配置串口中断收发数据(保姆级教程)
stm32使用HAL库配置串口中断收发数据(保姆级教程) - 分享几个国内免费的ChatGPT镜像网址(亲测有效)
 分享几个国内免费的ChatGPT镜像网址(亲测有效)
分享几个国内免费的ChatGPT镜像网址(亲测有效) - Allegro16.6差分等长设置及走线总结
 Allegro16.6差分等长设置及走线总结
Allegro16.6差分等长设置及走线总结